 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: AD677AD | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |
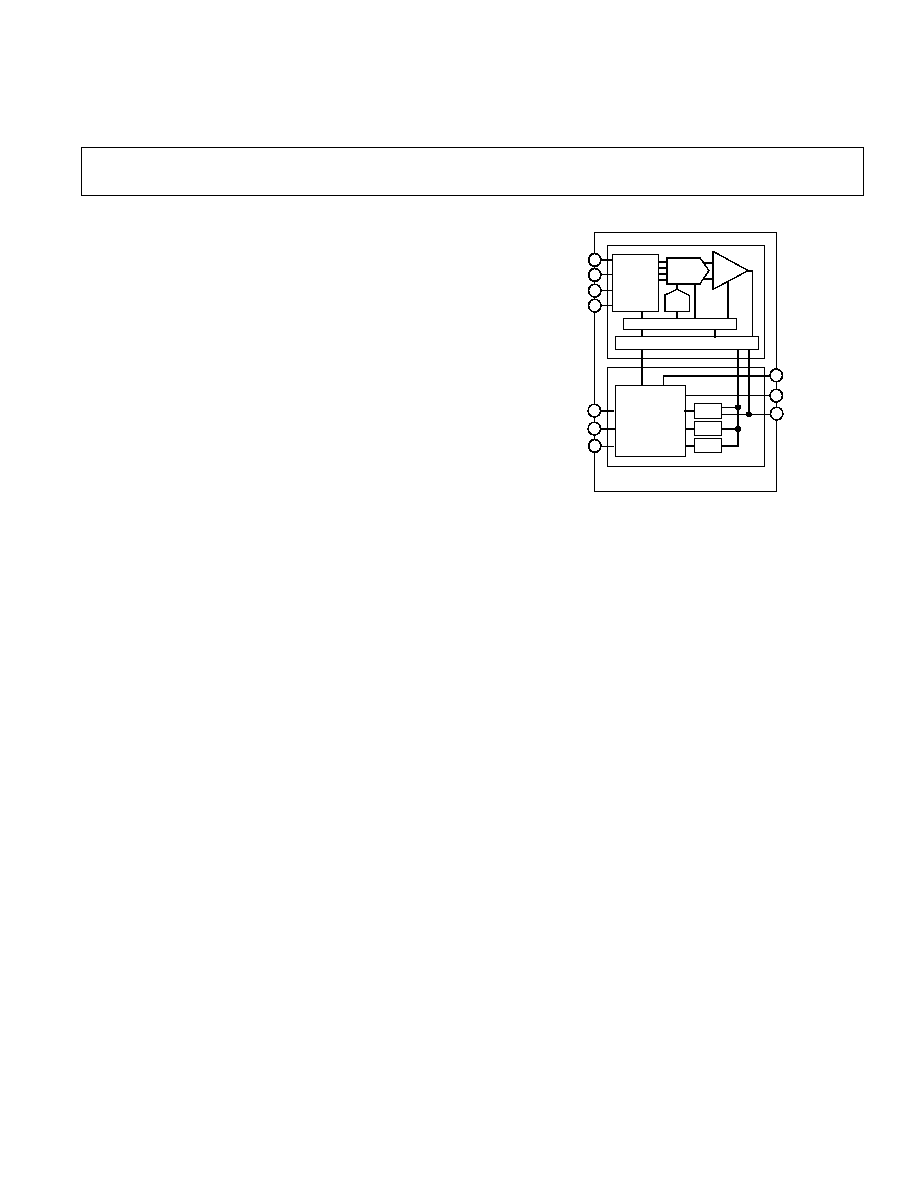
FUNCTIONAL BLOCK DIAGRAM
AGND
V
R E F
V
IN
CLK
SAMPLE
D CHIP
AD677
RAM
ALU
SAR
AGND SENSE
CAL
BUSY
MICROCODED
CONTROLLER
A CHIP
LEVEL TRANSLATORS
LOGIC TIMING
INPUT
BUFFERS
COMP
DAC
CAL
16-BIT
DAC
10
9
11
8
16
2
1
15
3
14 SCLK
SDATA
REV. A
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
a
16-Bit 100 kSPS
Sampling ADC
AD677
FEATURES
Autocalibrating
On-Chip Sample-Hold Function
Serial Output
16 Bits No Missing Codes
1 LSB INL
≠99 dB THD
92 dB S/(N+D)
1 MHz Full Power Bandwidth
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 617/329-4700
Fax: 617/326-8703
PRODUCT HIGHLIGHTS
1. Autocalibration provides excellent dc performance while
eliminating the need for user adjustments or additional exter-
nal circuitry.
2.
±
5 V to
±
10 V input range (
±
V
REF
).
3. Available in 16-pin 0.3" skinny DIP or 28-lead SOIC.
4. Easy serial interface to standard ADI DSPs.
5. TTL compatible inputs/outputs.
6. Excellent ac performance: ≠99 dB THD, 92 dB S/(N+D)
peak spurious ≠101 dB.
7. Industry leading dc performance: 1.0 LSB INL,
±
1 LSB full
scale and offset.
PRODUCT DESCRIPTION
The AD677 is a multipurpose 16-bit serial output analog-to-
digital converter which utilizes a switched-capacitor/charge
redistribution architecture to achieve a 100 kSPS conversion
rate (10
µ
s total conversion time). Overall performance is opti-
mized by digitally correcting internal nonlinearities through
on-chip autocalibration.
The AD677 circuitry is segmented onto two monolithic chips--
a digital control chip fabricated on Analog Devices DSP CMOS
process and an analog ADC chip fabricated on our BiMOS II
process. Both chips are contained in a single package.
The AD677 is specified for ac (or "dynamic") parameters such
as S/(N+D) Ratio, THD and IMD which are important in sig-
nal processing applications. In addition, dc parameters are
specified which are important in measurement applications.
The AD677 operates from +5 V and
±
12 V supplies and typi-
cally consumes 450 mW using a 10 V reference (360 mW with
5 V reference) during conversion. The digital supply (V
DD
) is
separated from the analog supplies (V
CC
, V
EE
) for reduced digi-
tal crosstalk. An analog ground sense is provided to remotely
sense the ground potential of the signal source. This can be use-
ful if the signal has to be carried some distance to the A/D con-
verter. Separate analog and digital grounds are also provided.
The AD677 is available in a 16-pin narrow plastic DIP, 16-pin
narrow side-brazed ceramic package, or 28-lead SOIC. A paral-
lel output version, the AD676, is available in a 28-pin ceramic
or plastic DIP. All models operate over a commercial tempera-
ture range of 0
∞
C to +70
∞
C or an industrial range of ≠40
∞
C to
+85
∞
C.

AD677≠SPECIFICATIONS
AC SPECIFICATIONS
AD677J/A
AD677K/B
Parameter
Min
Typ
Max
Min
Typ
Max
Units
Total Harmonic Distortion (THD)
2
@ 83 kSPS, T
MIN
to T
MAX
≠97
≠92
≠99
≠95
dB
@ 100 kSPS, +25
∞
C
≠97
≠92
≠99
≠95
dB
@ 100 kSPS, T
MIN
to T
MAX
≠93
≠95
dB
Signal-to-Noise and Distortion Ratio (S/(N+D))
2, 3
@ 83 kSPS, T
MIN
to T
MAX
89
91
90
92
dB
@ 100 kSPS, +25
∞
C
89
91
90
92
dB
@ 100 kSPS, T
MIN
to T
MAX
89
90
dB
Peak Spurious or Peak Harmonic Component
≠101
≠101
dB
Intermodulation Distortion (IMD)
4
2nd Order Products
≠102
≠102
dB
3rd Order Products
≠98
≠98
dB
Full Power Bandwidth
1
1
MHz
Noise
160
160
µ
V rms
DIGITAL SPECIFICATIONS
Parameter
Test Conditions
Min
Typ
Max
Units
LOGIC INPUTS
V
IH
High Level Input Voltage
2.0
V
DD
+ 0.3
V
V
IL
Low Level Input Voltage
≠0.3
0.8
V
I
IH
High Level Input Current
V
IH
= V
DD
≠10
+10
µ
A
I
IL
Low Level Input Current
V
IL
= 0 V
≠10
+10
µ
A
C
IN
Input Capacitance
10
pF
LOGIC OUTPUTS
V
OH
High Level Output Voltage
I
OH
= 0.1 mA
V
DD
≠ 1 V
V
I
OH
= 0.5 mA
2.4
V
V
OL
Low Level Output Voltage
I
OL
= 1.6 mA
0.4
V
NOTES
1
V
REF
= 10.0 V, Conversion Rate = 100 kSPS, f
lN
= 1.0 kHz, V
IN
= ≠0.05 dB, Bandwidth = 50 kHz unless otherwise indicated. All measurements referred to a 0 dB
(20 V p-p) input signal. Values are post-calibration.
2
For other input amplitudes, refer to Figure 12.
3
For dynamic performance with different reference values see Figure 11.
4
fa = 1008 Hz, fb = 1055 Hz. See Definition of Specifications section and Figure 16.
Specifications subject to change without notice.
(T
MIN
to T
MAX,
V
CC
= +12 V 5%, V
EE
= ≠12 V 5%, V
DD
= +5 V 10%)
1
(for all grades T
MIN
to T
MAX
, V
CC
= +12 V 5%, V
EE
= ≠12 V 5%, V
DD
= +5 V 10%)
REV. A
≠2≠
AD677
DC SPECIFICATIONS
AD677J/A
AD677K/B
Parameter
Min
Typ
Max
Min
Typ
Max
Units
TEMPERATURE RANGE
J, K Grades
0
+70
0
+70
∞
C
A, B Grades
≠40
+85
≠40
+85
∞
C
ACCURACY
Resolution
16
16
Bits
Integral Nonlinearity (INL)
@ 83 kSPS, T
MIN
to T
MAX
±
1
±
1
±
1.5
LSB
@ 100 kSPS, +25
∞
C
±
1
+1
±
1.5
LSB
@ 100 kSPS, T
MIN
to T
MAX
±
2
±
2
LSB
Differential Nonlinearity (DNL)≠No Missing Codes
16
16
Bits
Bipolar Zero Error
2
±
2
±
4
±
1
±
3
LSB
Positive, Negative FS Errors
2
@ 83 kSPS
±
2
±
4
±
1
±
3
LSB
@ 100 kSPS, +25
∞
C
±
2
±
4
±
1
±
3
LSB
@ 100 kSPS
±
4
±
4
LSB
TEMPERATURE DRIFT
3
Bipolar Zero
±
0.5
±
0.5
LSB
Postive Full Scale
±
0.5
±
0.5
LSB
Negative Full Scale
±
0.5
±
0.5
LSB
VOLTAGE REFERENCE INPUT RANGE
4
(V
REF
)
5
10
5
10
V
ANALOG INPUT
5
Input Range (V
IN
)
±
V
REF
±
V
REF
V
Input Impedance
*
*
Input Settling Time
2
2
µ
s
Input Capacitance During Sample
50*
50*
pF
Aperture Delay
6
6
ns
Aperture Jitter
100
100
ps
POWER SUPPLIES
Power Supply Rejection
6
V
CC
= +12 V
±
5%
±
0.5
±
0.5
LSB
V
EE
= ≠12 V
±
5%
±
0.5
±
0.5
LSB
V
DD
= +5 V
±
10%
±
0.5
±
0.5
LSB
Operating Current
V
REF
= +5 V
I
CC
14.5
18
14.5
18
mA
I
EE
14.5
18
14.5
18
≠mA
I
DD
3
5
3
5
mA
Power Consumption
360
480
360
480
mW
V
REF
= +10 V
I
CC
18
24
18
24
mA
I
EE
18
24
18
24
≠mA
I
DD
3
5
3
5
mA
Power Consumption
450
630
450
630
mW
NOTES
1
V
REF
= 10.0 V, Conversion Rate = 100 kSPS unless otherwise noted. Values are post-calibration.
2
Values shown apply to any temperature from T
MIN
to T
MAX
after calibration at that temperature at nominal supplies.
3
Values shown are based upon calibration at +25
∞
C with no additional calibration at temperature. Values shown are the typical variation from the value at +25
∞
C.
4
See "APPLICATIONS" section for recommended voltage reference circuit, and Figure 11 for dynamic performance with other reference voltage values.
5
See "APPLICATIONS" section for recommended input buffer circuit.
6
Typical deviation of bipolar zero, ≠full scale or +full scale from min to max rating.
*For explanation of input characteristics, see "ANALOG INPUT" section.
Specifications subject to change without notice.
(T
MIN
to T
MAX
, V
CC
= +12 V 5%, V
EE
= ≠12 V 5%, V
DD
= +5 V 1O%)
1
REV. A
≠3≠

AD677
REV. A
≠4≠
(T
MIN
to T
MAX
, V
CC
= +12 V 5%, V
EE
= ≠12 V 5%, V
DD
= +5 V 10%)
1
TIMING SPECIFICATIONS
Parameter
Symbol
Min
Typ
Max
Units
Conversion Period
2, 3
t
C
10
1000
µ
s
CLK Period
4
t
CLK
480
ns
Calibration Time
t
CT
85532
t
CLK
Sampling Time
t
S
2
µ
s
Last CLK to SAMPLE Delay
5
t
LCS
2.1
µ
s
SAMPLE Low
t
SL
100
ns
SAMPLE to Busy Delay
t
SS
30
75
ns
1st CLK Delay
t
FCD
50
ns
CLK Low
6
t
CL
50
ns
CLK High
6
t
CH
50
ns
CLK to BUSY Delay
t
CB
180
300
ns
CLK to SDATA Valid
t
CD
50
100
175
ns
CLK to SCLK High
t
CSH
100
180
300
ns
SCLK Low
t
SCL
50
80
ns
SDATA to SCLK High
t
DSH
50
80
ns
CAL High Time
t
CALH
50
ns
CAL to BUSY Delay
t
CALB
15
50
ns
NOTES
1
See the "CONVERSION CONTROL" and "AUTOCALIBRATION" sections for detailed explanations of the above timing.
2
Depends upon external clock frequency; includes acquisition time and conversion time. The maximum conversion period is specified to account for the droop of the
internal sample/hold function. Operation at slower rates may degrade performance.
3
t
C
= t
FCD
+ 16
◊
t
CLK
+ t
LCS
.
4
580 ns is recommended for optimal accuracy over temperature (not necessary during calibration cycle).
5
If SAMPLE goes high before the 17th CLK pulse, the device will start sampling approximately 100 ns after the rising edge of the 17th CLK pulse.
6
t
CH
+ t
CL
= t
CLK
and must be greater than 480 ns.
CAL
(INPUT)
BUSY
(OUTPUT)
CLK
*
(INPUT)
t
CT
t
CALH
t
CALB
t
CB
t
FCD
85530
85531
85532
1
2
3
t
CL
t
CH
t
CLK
*
SHADED PORTIONS OF INPUT SIGNALS ARE OPTIONAL. FOR BEST PERFORMANCE, WE
RECOMMEND THAT THESE SIGNALS BE HELD LOW EXCEPT WHEN EXPLICITY SHOWN HIGH.
Figure 1. Calibration Timing
t
CB
BUSY
(OUTPUT)
t
FCD
t
CH
*
SHADED PORTIONS OF INPUT SIGNALS ARE OPTIONAL. FOR BEST PERFORMANCE, WE
RECOMMEND THAT THESE SIGNALS BE HELD LOW EXCEPT WHEN EXPLICITY SHOWN HIGH.
SAMPLE*
(INPUT)
t
S
CLK
*
(INPUT)
1
2
3
15
16
17
t
S
t
LCS
MSB
BIT
2
BIT
15
BIT
13
BIT
14
BIT
16
SCLK
(OUTPUT)
SDATA
(OUTPUT)
OLD BIT 16
t
C
t
CD
t
SCL
t
DSH
t
SB
t
SL
t
CLK
t
CSH
t
CL
Figure 2. General Conversion Timing
AD677
REV. A
≠5≠
WARNING!
ESD SENSITIVE DEVICE
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the AD677 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
ORDERING GUIDE
Temperature
Package
Model
Range
S/(N+D)
Max INL
Package Description
Option*
AD677JN
0
∞
C to +70
∞
C
89 dB
Typ Only
Plastic 16-Pin DIP
N-16
AD677KN
0
∞
C to +70
∞
C
90 dB
±
1.5 LSB
Plastic 16-Pin DIP
N-16
AD677JD
0
∞
C to +70
∞
C
89 dB
Typ Only
Ceramic 16-Pin DIP
D-16
AD677KD
0
∞
C to +70
∞
C
90 dB
±
1.5 LSB
Ceramic 16-Pin DIP
D-16
AD677JR
0
∞
C to +70
∞
C
89 dB
Typ Only
Plastic 28-Lead SOIC
R-28
AD677KR
0
∞
C to +70
∞
C
90 dB
±
1.5 LSB
Plastic 28-Lead SOIC
R-28
AD677AD
≠40
∞
C to +85
∞
C
89 dB
Typ Only
Ceramic 16-Pin DIP
D-16
AD677BD
≠40
∞
C to +85
∞
C
90 dB
±
1.5 LSB
Ceramic 16-Pin DIP
D-16
*D = Ceramic DIP; N = Plastic DIP; R = Small Outline IC (SOIC).
ABSOLUTE MAXIMUM RATINGS*
V
CC
to V
EE
. . . . . . . . . . . . . . . . . . . . . . . . . . . . ≠0.3 V to +26.4 V
V
DD
to DGND . . . . . . . . . . . . . . . . . . . . . . . . . . . . ≠0.3 V to +7 V
Vcc to AGND . . . . . . . . . . . . . . . . . . . . . . . . . . . ≠0.3 V to +18 V
VEE to AGND . . . . . . . . . . . . . . . . . . . . . . . . . . ≠18 V to +0.3 V
AGND to DGND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . +0.3 V
Digiul Inputs to DGND . . . . . . . . . . . . . . . . . . . . . . 0 to +5.5 V
Analog Inputs, V
REF
to AGND
. . . . . . . . . . . . . . . . . . . . . . . . . . . . (V
CC
+0.3 V) to (V
EE
≠0.3 V)
Soldering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . +300
∞
C, 10 sec
Storage Temperature . . . . . . . . . . . . . . . . . . . . . ≠65
∞
C to +150
∞
C
*Stresses greater than those listed under "Absolute Maximum Ratings" may cause
permanent damage to the device. This is a stress rating only and functional
operation of the device at these or any other conditions above those indicated in the
operational section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect device reliability.

AD677
REV. A
≠6≠
PIN DESCRIPTION
DIP Pin
SOIC Pin
Type
Name
Description
1
1
SAMPLE
DI
V
IN
Acquisition Control Pin. Active HIGH. During conversion, SAMPLE
controls the suite of the internal sample-hold amplifier and the falling edge
initiates conversion. During calibration, SAMPLE should be held LOW. If
HIGH during calibration, diagnostic information will appear on SDATA.
2
2
CLK
DI
Master Clock Input. The AD677 requires 17 clock pulses to execute a
conversion. CLK is also used to derive SCLK.
3
3
SDATA
DO
Serial Output Data Controlled by SCLK.
4
6, 7
DGND
P
Digital Ground.
5
8
V
CC
P
+12 V Analog Supply Voltage.
8
12
AGND
P
Analog Ground.
.9
15
AGND SENSE
AI
Analog Ground Sense.
10
16
V
IN
AI
Analog Input Voltage.
11
17
V
REF
AI
External Voltage Reference Input.
12
21
V
EE
P
≠12 V Analog Supply Voltage.
13
22, 23
V
DD
P
+5 V Logic Supply Voltage.
14
26
SCLK
DO
Clock Output for Data Read, derived from CLK.
15
27
BUSY
DO
Status Line for Converter. Active HIGH, indicating a conversion or
calibration in progress.
16
28
CAL
DI
Calibration Control Pin.
6, 7
4, 5, 9, 10, 11,
NC
_
No Connection. No connections should be made to these pins.
13, 14, 18, 19,
20, 24, 25
Type: AI = Analog Input
DI = Digital Input
DO = Digital Output
P = Power
1
2
3
7
28
27
26
22
8
9
10
21
20
19
11
12
18
17
4
5
25
24
6
23
TOP VIEW
(Not to Scale)
13
14
16
15
AD677
NC = NO CONNECT
NC
AGND
CLK
SAMPLE
DGND2
NC
NC
V
CC
NC
NC
NC
SDATA
DGND1
NC
CAL
BUSY
V
IN
V
REF
NC
NC
NC
V
EE
NC
NC
SCLK
V
DD1
V
DD2
AGND
SENSE
SOIC Pinout
SAMPLE
CLK
DGND
NC
NC
AGND
V
CC
CAL
BUSY
AGND
SENSE
V
IN
V
EE
V
DD
V
REF
1
2
3
4
5
6
7
8
16
15
14
13
12
11
10
9
TOP VIEW
(Not to Scale)
AD677
NC = NO CONNECT
SCLK
SDATA
DIP Pinout

INTERMODULATION DISTORTION (IMD)
With inputs consisting of sine waves at two frequencies, fa and
fb, any device with nonlinearities will create distortion products,
of order (m+n), at sum and difference frequencies of mfa
±
nfb,
where m, n = 0, 1, 2, 3 . . . . Intermodulation terms are those
for which m or n is not equal to zero. For example, the second
order terms are (fa + fb) and (fa ≠ fb), and the third order terms
are (2 fa + fb), (2 fa ≠ fb), (fa + 2 fb) and (fa ≠ 2 fb). The IMD
products are expressed as the decibel ratio of the rms sum of the
measured input signals to the rms sum of the distortion terms.
The two signals applied to the converter are of equal amplitude,
and the peak value of their sum is ≠0.5 dB from full scale. The
IMD products are normalized to a 0 dB input signal.
APERTURE DELAY
Aperture delay is the time required after SAMPLE pin is taken
LOW for the internal sample-hold of the AD677 to open, thus
holding the value of V
IN
.
APERTURE JITTER
Aperture jitter is the variation in the aperture delay from sample
to sample.
POWER SUPPLY REJECTION
DC variations in the power supply voltage will affect the overall
transfer function of the ADC, resulting in zero error and full-
scale error changes. Power supply rejection is the maximum
change in either the bipolar zero error or full-scale error value.
Additionally, there is another power supply variation to con-
sider. AC ripple on the power supplies can couple noise into the
ADC, resulting in degradation of dynamic performance. This is
displayed in Figure 15.
INPUT SETTLING TIME
Settling time is a function of the SHA's ability to track fast
slewing signals. This is specified as the maximum time required
in track mode after a full-scale step input to guarantee rated
conversion accuracy.
NOISE/DC CODE UNCERTAINTY
Ideally, a fixed dc input should result in the same output code
for repetitive conversions. However, as a consequence of un-
avoidable circuit noise within the wideband circuits in the ADC,
there is a range of output codes which may occur for a given in-
put voltage. If you apply a dc signal to the ADC and record a
large number of conversions, the result will be a distribution of
codes. If you fit a Gaussian probability distribution to the histo-
gram, the standard deviation is approximately equivalent to the
rms input noise of the ADC.
REV. A
≠7≠
Definition of Specifications≠AD677
NYQUIST FREQUENCY
An implication of the Nyquist sampling theorem, the "Nyquist
frequency'' of a converter is that input frequency which is one
half the sampling frequency of the converter.
TOTAL HARMONIC DISTORTION
Total harmonic distortion (THD) is the ratio of the rms sum of
the harmonic components to the rms value of a full-scale input
signal and is expressed in percent (%) or decibels (dB). For in-
put signals or harmonics that are above the Nyquist frequency,
the aliased components are used.
SIGNAL-TO-NOISE PLUS DISTORTION RATIO
Signal-to-noise plus distortion is defined to be the ratio of the
rms value of the measured input signal to the rms sum of all
other spectral components below the Nyquist frequency, includ-
ing harmonics but excluding dc.
+/≠ FULL-SCALE ERROR
The last + transition (from 011 . . . 10 to 011 . . . 11) should
occur for an analog voltage 1.5 LSB below the nominal full
scale (4.99977 volts for a
±
5 V range). The full-scale error is
the deviation of the actual level of the last transition from the
ideal level.
BIPOLAR ZERO ERROR
Bipolar zero error is the difference between the ideal midscale
input voltage (0 V) and the actual voltage producing the mid-
scale output code.
DIFFERENTIAL NONLINEARITY (DNL)
In an ideal ADC, code transitions are one LSB apart. Differen-
tial nonlinearity is the maximum deviation from this ideal value.
It is often specified in terms of resolution for which no missing
codes are guaranteed.
INTEGRAL NONLINEARITY (INL)
The ideal transfer function for an ADC is a straight line bisect-
ing the center of each code drawn between "zero" and "full
scale." The point used as "zero" occurs 1/2 LSB before the
most negative code transition. "Full scale" is defined as a level
1.5 LSB beyond the most positive code transition. Integral non-
linearity is the worst-case deviation of a code center average
from the straight line.
BANDWIDTH
The full-power bandwidth is that input frequency at which the
amplitude of the reconstructed fundamental is reduced by 3 dB
for a full-scale input.

AD677
REV. A
≠8≠
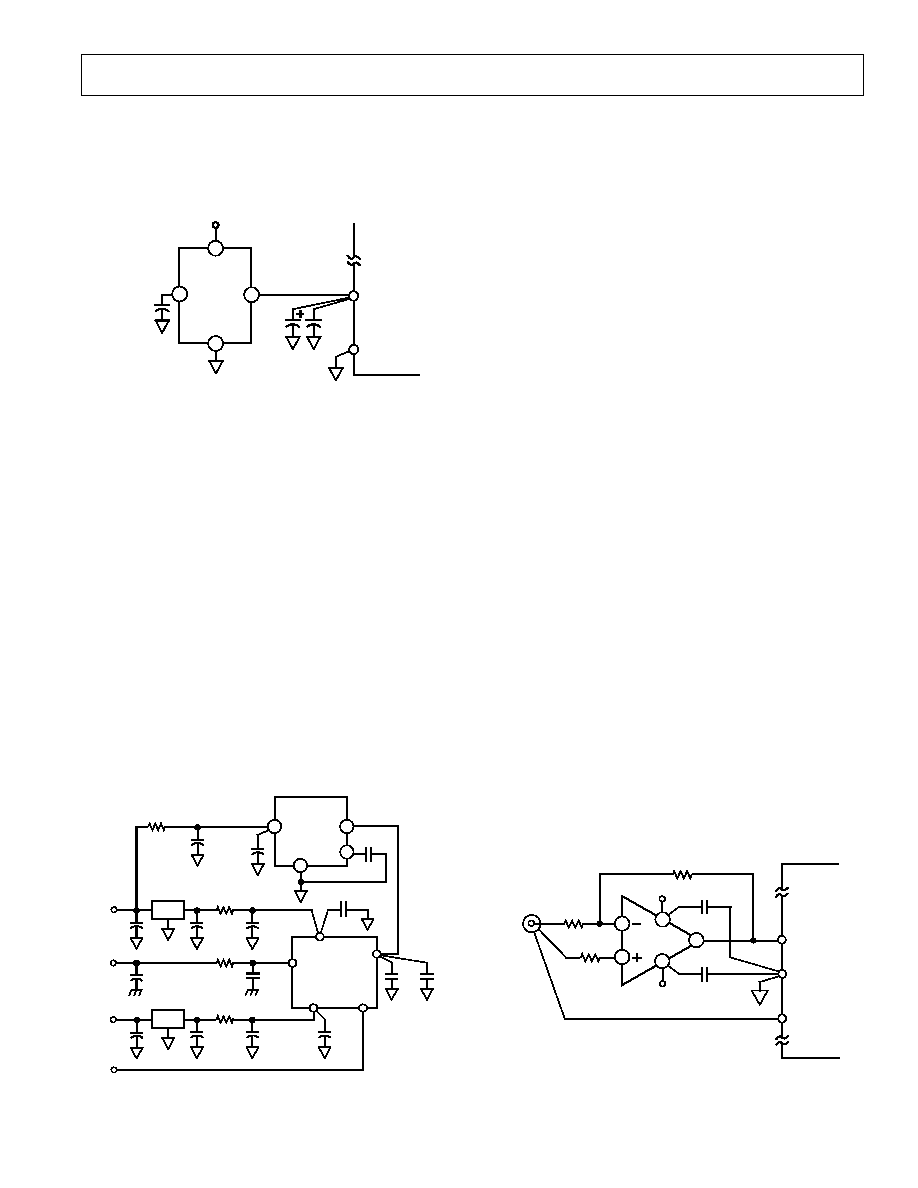
FUNCTIONAL DESCRIPTION
The AD677 is a multipurpose 16-bit analog-to-digital converter
and includes circuitry which performs an input sample/hold
function, ground sense, and autocalibration. These functions
are segmented onto two monolithic chips--an analog signal pro-
cessor and a digital controller. Both chips are contained within
the AD677 package.
The AD677 employs a successive-approximation technique to
determine the value of the analog input voltage. However, in-
stead of the traditional laser-trimmed resistor-ladder approach,
this device uses a capacitor-array, charge redistribution tech-
nique. Binary-weighted capacitors subdivide the input sample to
perform the actual analog-to-digital conversion. The capacitor
array eliminates variation in the linearity of the device due to
temperature-induced mismatches of resistor values. Since a
capacitor array is used to perform the data conversions, the
sample/hold function is included without the need for additional
external circuitry.
Initial errors in capacitor matching are eliminated by an
autocalibration circuit within the AD677. This circuit employs
an on-chip microcontroller and a calibration DAC to measure
and compensate capacitor mismatch errors. As each error is
determined, its value is stored in on-chip memory (RAM).
Subsequent conversions use these RAM values to improve con-
version accuracy. The autocalibration routine may be invoked
at any time. Autocalibration insures high performance while
eliminating the need for any user adjustments and is described
in detail below.
The microcontroller controls all of the various functions within
the AD677. These include the actual successive approximation
algorithm, the autocalibration routine, the sample/hold opera-
tion, and the internal output data latch.
AUTO CALIBRATION
The AD677 achieves rated performance without the need for
user trims or adjustments. This is accomplished through the use
of on-chip autocalibration.
In the autocalibration sequence, sample/hold offset is nulled by
internally connecting the input circuit to the ground sense cir-
cuit. The resulting offset voltage is measured and stored in
RAM for later use. Next, the capacitor representing the most
significant bit (MSB) is charged to the reference voltage. This
charge is then transferred to a capacitor of equal size (composed
of the sum of the remaining lower weight bits). The voltage that
results represents the amount of capacitor mismatch. A calibra-
tion digital-to-analog converter (DAC) adds an appropriate
value of error correction voltage to cancel this mismatch. This
correction factor is also stored in RAM. This process is repeated
for each of the eight remaining capacitors representing the top
nine bits. The accumulated values in RAM are then used during
subsequent conversions to adjust conversion results accordingly.
As shown in Figure 1, when CAL is taken HIGH the AD677
internal circuitry is reset, the BUSY pin is driven HIGH, and
the ADC prepares for calibration. This is an asynchronous hard-
ware reset and will interrupt any conversion or calibration cur-
rently in progress. Actual calibration begins when CAL is taken
LOW and completes in 85,532 clock cycles, indicated by BUSY
going LOW. During calibration, it is preferable for SAMPLE to
be held LOW. If SAMPLE is HIGH, diagnostic data will appear
on SDATA. This data is of no value to the user.
In most applications, it is sufficient to calibrate the AD677 only
upon power-up, in which case care should be taken that the
power supplies and voltage reference have stabilized first. If
calibration is not performed, the AD677 may come up in an un-
known state, or performance could degrade to as low as 10 bits.
CONVERSION CONTROL
The AD677 is controlled by two signals: SAMPLE and CLK,
as shown in Figure 2. It is assumed that the part has been cali-
brated and the digital I/O pins have the levels shown at the start
of the timing diagram.
A conversion consists of an input acquisition followed by 17
clock pulses which execute the 16-bit internal successive ap-
proximation routine. The analog input is acquired by taking the
SAMPLE line HIGH for a minimum sampling time of t
S
. The
actual sample taken is the voltage present on V
IN
one aperture
delay after the SAMPLE line is brought LOW, assuming the
previous conversion has completed (signified by BUSY going
LOW). Care should be taken to ensure that this negative edge is
well defined and jitter free in ac applications to reduce the un-
certainty (noise) in signal acquisition. With SAMPLE going
LOW, the AD677 commits itself to the conversion--the input
at V
IN
is disconnected from the internal capacitor array, BUSY
goes HIGH, and the SAMPLE input will be ignored until the
conversion is completed (when BUSY goes LOW). SAMPLE
must be held LOW for a minimum period of time t
SL
. A period
of time t
FCD
after bringing SAMPLE LOW, the 17 CLK cycles
are applied; CLK pulses that start before this period of time are
ignored. BUSY goes HIGH t
SB
after SAMPLE goes LOW, sig-
nifying that a conversion is in process, and remains HIGH until
the conversion is completed. As indicated in Figure 2, the twos
complement output data is presented MSB first. This data may
be captured with the rising edge of SCLK or the falling edge of
CLK, beginning with pulse #2. The AD677 will ignore CLK
after BUSY has gone LOW and SDATA or SCLK will not
change until a new sample is acquired.
CONTINUOUS CONVERSION
For maximum throughput rate, the AD677 can be operated in a
continuous convert mode. This is accomplished by utilizing the
fact that SAMPLE will no longer be ignored after BUSY goes
LOW, so an acquisition may be initiated even during the HIGH
time of the 17th CLK pulse for maximum throughput rate
while enabling full settling of the sample/hold circuitry. If
SAMPLE is already HIGH during the rising edge of the 17th
CLK, then an acquisition is immediately initiated approxi-
mately 100 ns after the rising edge of the 17th clock pulse.
Care must be taken to adhere to the minimum/maximum tim-
ing requirements in order to preserve conversion accuracy.
GENERAL CONVERSION GUIDELINES
During signal acquisition and conversion, care should be taken
with the logic inputs to avoid digital feedthrough noise. It is
possible to run CLK continuously, even during the sample
period. However, CLK edges during the sampling period, and
especially when SAMPLE goes LOW, may inject noise into the
sampling process. The AD677 is tested with no CLK cycles
during the sampling period. The BUSY signal can be used to
prevent the clock from running during acquisition, as illustrated

AD677
REV. A
≠9≠
in Figure 3. In this circuit BUSY is used to reset the circuitry
which divides the system clock down to provide the AD677
CLK. This serves to interrupt the clock until after the input sig-
nal has been acquired, which has occurred when BUSY goes
HIGH. When the conversion is completed and BUSY goes
LOW, the circuit in Figure 3 truncates the 17th CLK pulse
width which is tolerable because only its rising edge is critical.
5
2
1
7
12
9
4
11
12.288MHz
SYSTEM
CLOCK
CLK
74HC175
2D
1Q
CLR
3D
2Q
3Q
1D
BUSY
CLK
AD677
SAMPLE
2
8
9
12
6
13
1
1QD
74HC393
1CLR
2CLR
2QD
2QC
1CLK
2CLK
Figure 3.
Figure 3 also illustrates the use of a counter (74HC393) to de-
rive the AD677 SAMPLE command from the system clock
when a continuous convert mode is desirable. Pin 9 (2QC) pro-
vides a 96 kHz sample rate for the AD677 when used with a
12.288 MHz system clock. Alternately, Pin 8 (2QD) could be
used for a 48 kHz rate.
If a continuous clock is used, then the user must avoid CLK
edges at the instant of disconnecting V
IN
which occurs at the
falling edge of SAMPLE (see t
FCD
specification). The duty cycle
of CLK may vary, but both the HIGH (t
CH
) and LOW (t
CL
)
phases must conform to those shown in the timing specifica-
tions. The internal comparator makes its decisions on the rising
edge of CLK. To avoid a negative edge transition disturbing the
comparator's settling, t
CL
should be at least half the value of
t
CLK
. It is not recommended that the SAMPLE pin change state
toward the end of a CLK cycle, in order to avoid transitions dis-
turbing the internal comparator's settling.
During a conversion, internal dc error terms such as comparator
voltage offset are sampled, stored on internal capacitors and
used to correct for their corresponding errors when needed. Be-
cause these voltages are stored on capacitors, they are subject to
leakage decay and so require refreshing. For this reason there is
a maximum conversion time t
C
(1000
µ
s). From the time
SAMPLE goes HIGH to the completion of the 17th CLK pulse,
no more than 1000
µ
s should elapse for specified performance.
However, there is no restriction to the maximum time between
individual conversions.
Output coding for the AD677 is twos complement as shown in
Table I. The AD677 is designed to limit output coding in the
event of out-of-range input.
Table I. Serial Output Coding Format (Twos Complement)
V
IN
Output Code
<Full Scale
011 . . . 11
Full Scale
011 . . . 11
Full Scale ≠ 1 LSB
011 . . . 10
Midscale + 1 LSB
000 . . . 01
Midscale
000 . . . 00
Midscle ≠ 1 LSB
111 . . . 11
≠Full Scale + 1 LSB
100 . . . 01
≠Full Scale
100 . . . 00
<≠Full Scale
100 . . . 00
POWER SUPPLIES AND DECOUPLING
The AD677 has three power supply input pins. V
CC
and V
EE
provide the supply voltages to operate the analog portions of the
AD677 including the capacitor DAC, input buffers and com-
parator. V
DD
provides the supply voltage which operates the
digital portions of the AD677 including the data output buffers
and the autocalibration controller.
As with most high performance linear circuits, changes in the
power supplies can produce undesired changes in the perfor-
mance of the circuit. Optimally, well regulated power supplies
with less than 1% ripple should be selected. The ac output im-
pedance of a power supply is a complex function of frequency,
and in general will increase with frequency. In other words, high
frequency switching such as that encountered with digital cir-
cuitry requires fast transient currents which most power supplies
cannot adequately provide. This results in voltage spikes on the
supplies. If these spikes exceed the
±
5% tolerance of the
±
12 V
supplies or the
±
10% limits of the +5 V supply, ADC perfor-
mance will degrade. Additionally, spikes at frequencies higher
than 100 kHz will also degrade performance. To compensate for
the finite ac output impedance of the supplies, it is necessary to
store "reserves" of charge in bypass capacitors. These capacitors
can effectively lower the ac impedance presented to the AD677
power inputs which in turn will significantly reduce the magni-
tude of the voltage spikes. For bypassing to be effective, certain
guidelines should be followed. Decoupling capacitors, typically
0.1
µ
F, should be placed as closely as possible to each power
supply pin of the AD677. It is essential that these capacitors be
placed physically close to the IC to minimize the inductance of
the PCB trace between the capacitor and the supply pin. The
logic supply (V
DD
) should be decoupled to digital common and
the analog supplies (V
CC
and V
EE
) to analog common. The ref-
erence input is also considered as a power supply pin in this re-
gard and the same decoupling procedures apply. These points
are displayed in Figure 4.
+5V
+12V
≠12V
SYSTEM
ANALOG
COMMON
SYSTEM
DIGITAL
COMMON
AGND
DGND
AD677
V
EE
V
CC
V
REF
V
DD
0.1µF
0.1µF
0.1µF
0.1µF
Figure 4. Grounding and Decoupling the AD677
AD677
REV. A
≠10≠
Additionally, it is beneficial to have large capacitors (>47
µ
F)
located at the point where the power connects to the PCB with
10
µ
F capacitors located in the vicinity of the ADC to further
reduce low frequency ripple. In systems that will be subjected to
particularly harsh environmental noise, additional decoupling
may be necessary. RC-filtering on each power supply combined
with dedicated voltage regulation can substantially decrease
power supply ripple effects (this is further detailed in Figure 7).
BOARD LAYOUT
Designing with high resolution data converters requires careful
attention to board layout. Trace impedance is a significant issue.
A 1.22 mA current through a 0.5
trace will develop a voltage
drop of 0.6 mV, which is 4 LSBs at the 16-bit level for a 10 V
full-scale span. In addition to ground drops, inductive and capaci-
tive coupling need to be considered, especially when high accu-
racy analog signals share the same board with digital signals.
Analog and digital signals should not share a common return
path. Each signal should have an appropriate analog or digital
return routed close to it. Using this approach, signal loops en-
close a small area, minimizing the inductive coupling of noise.
Wide PC tracks, large gauge wire, and ground planes are highly
recommended to provide low impedance signal paths. Separate
analog and digital ground planes are also desirable, with a single
interconnection point at the AD677 to minimize interference
between analog and digital circuitry. Analog signals should be
routed as far as possible from digital signals and should cross
them, if at all, only at right angles. A solid analog ground plane
around the AD677 will isolate it from large switching ground
currents. For these reasons, the use of wire wrap circuit con-
struction will not provide adequate performance; careful printed
circuit board construction is preferred.
GROUNDING
The AD677 has three grounding pins, designated ANALOG
GROUND (AGND), DIGITAL GROUND (DGND) and
ANALOG GROUND SENSE (AGND SENSE). The analog
ground pin is the "high quality" ground reference point for the
device, and should be connected to the analog common point in
the system.
AGND SENSE is intended to be connected to the input signal
ground reference point. This allows for slight differences in level
between the analog ground point in the system and the input
signal ground point. However no more than 100 mV is recom-
mended between the AGND and the AGND SENSE pins for
specified performance.
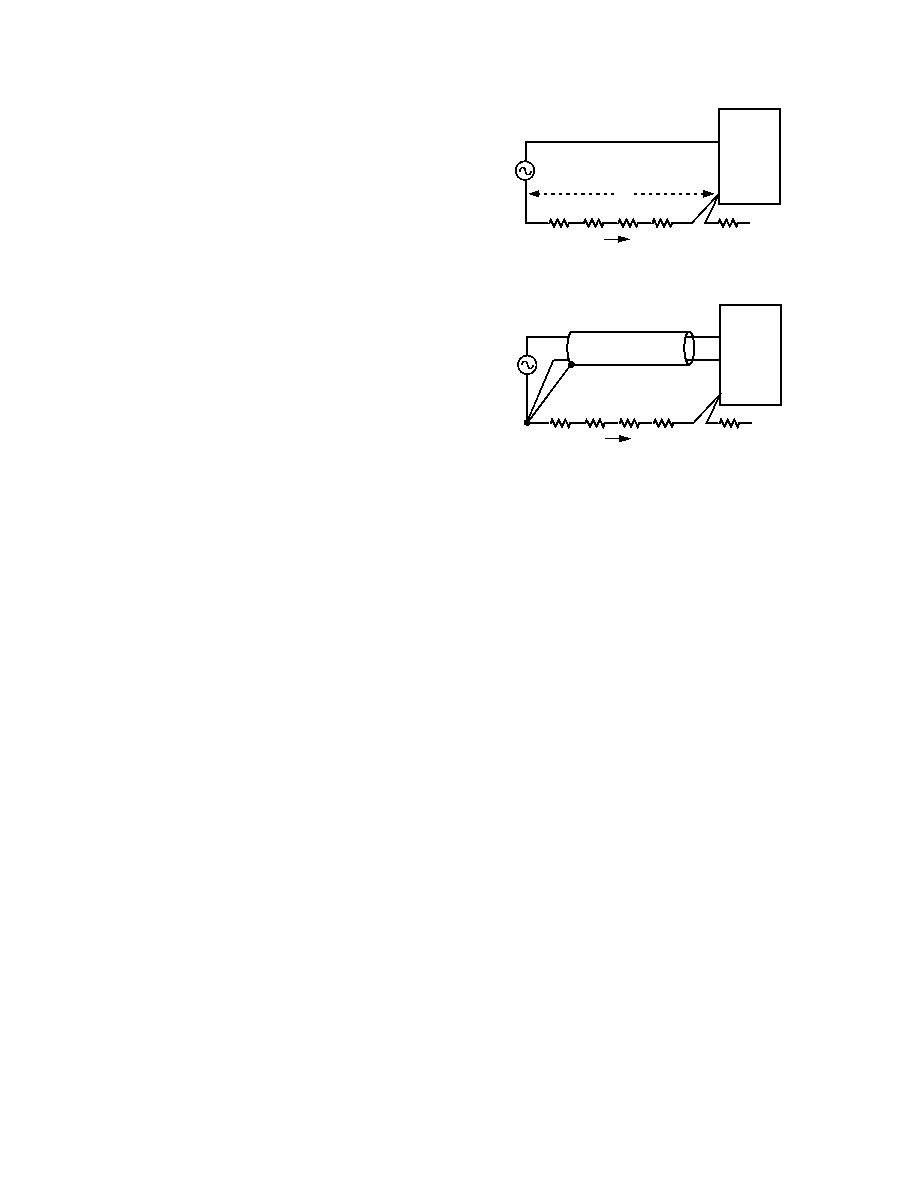
Using AGND SENSE to remotely sense the ground potential of
the signal source can be useful if the signal has to be carried
some distance to the A/D converter. Since all IC ground cur-
rents have to return to the power supply and no ground leads
are free from resistance and inductance, there are always some
voltage differences from one ground point in a system to another.
Over distance this voltage difference can easily amount to sev-
eral LSBs (in a 10 V input span, 16-bit system each LSB is
about 0.15 mV). This would directly corrupt the A/D input sig-
nal if the A/D measures its input with respect to power ground
(AGND) as shown in Figure 5a. To solve this problem the
AD677 offers an AGND SENSE pin. Figure 5b shows how the
AGND SENSE can be used to eliminate the problem in Figure
5a. Figure 5b also shows how the signal wires should be
V
IN
AGND
SOURCE
V
S
GROUND LEAD
I
GROUND
> 0
TO POWER
SUPPLY GND
AD677
V
Figure 5a. Input to the A/D is Corrupted by IR Drop in
Ground Leads: V
IN
= V
S
+
V.
V
IN
AGND
SENSE
AGND
SOURCE
V
S
SHIELDED CABLE
GROUND LEAD
I
GROUND
> 0
TO POWER
SUPPLY GND
AD677
Figure 5b. AGND SENSE Eliminates the Problem in
Figure 5a.
shielded in a noisy environment to avoid capacitive coupling. If
inductive (magnetic) coupling is expected to be dominant such
as where motors are present, twisted-pair wires should be used
instead.
The digital ground pin is the reference point for all of the digital
signals that operate the AD677. This pin should be connected
to the digital common point in the system. As Figure 4 illus-
trated, the analog and digital grounds should be connected
together at one point in the system, preferably at the AD677.
VOLTAGE REFERENCE
The AD677 requires the use of an external voltage reference.
The input voltage range is determined by the value of the refer-
ence voltage; in general, a reference voltage of n volts allows an
input range of
±
n volts. The AD677 is specified for a voltage
reference between +5 V and +10 V. A 10 V reference will typi-
cally require support circuitry operated from
±
15 V supplies; a
5.0 V reference may be used with
±
12 V supplies. Signal-to-
noise performance is increased proportionately with input signal
range (see Figure 12). In the presence of a fixed amount of sys-
tem noise, increasing the LSB size (which results from increas-
ing the reference voltage) will increase the effective S/(N+D)
performance. Figure 11 illustrates S/(N+D) as a function of ref-
erence voltage. In contrast, dc accuracy will be optimal at lower
reference voltage values (such as 5 V) due to capacitor nonlin-
earity at higher voltage values.
During a conversion, the switched capacitor array of the AD677
presents a dynamically changing current load at the voltage ref-
erence as the successive-approximation algorithm cycles through
various choices of capacitor weighting. (See the following sec-
tion "Analog Input" for a detailed discussion of the V
REF
input
characteristics.) The output impedance of the reference circuitry
must be low so that the output voltage will remain sufficiently
constant as the current drive changes. In some applications, this
may require that the output of the voltage reference be buffered
by an amplifier with low impedance at relatively high frequen-
cies. In choosing a voltage reference, consideration should be
AD677
REV. A
≠11≠
made for selecting one with low noise. A capacitor connected
between REF IN and AGND will reduce the demands on the
reference by decreasing the magnitude of high frequency com-
ponents required to be sourced by the reference.
Figures 6 and 7 represent typical design approaches.
V
IN
10µF
AGND
C
N
1.0µF
+12V
AD586
AD677
6
2
4
8
V
REF
0.1µF
Figure 6.
Figure 6 shows a voltage reference circuit featuring the 5 V out-
put AD586. The AD586 is a low cost reference which utilizes a
buried Zener architecture to provide low noise and drift. Over
the 0
∞
C to +70
∞
C range, the AD586M grade exhibits less than
1.0 mV output change from its initial value at +25
∞
C. A noise
reduction capacitor, C
N
, reduces the broadband noise of the
AD586 output, thereby optimizing the overall performance of
the AD677. It is recommended that a 10
µ
F to 47
µ
F high qual-
ity tantalum capacitor and a 0.1
µ
F capacitor be tied between
the V
REF
input of the AD677 and ground to minimize the im-
pedance on the reference.
Using the AD677 with
±
10 V input range (V
REF
= 10 V) typi-
cally requires
±
15 V supplies to drive op amps and the voltage
reference. If
±
12 V is not available in the system, regulators
such as 78L12 and 79L12 can be used to provide power for the
AD677. This is also the recommended approach (for any input
range) when the ADC system is subjected to harsh environ-
ments such as where the power supplies are noisy and where
voltage spikes are present. Figure 7 shows an example of such a
system based upon the 10 V AD587 reference, which provides a
300
µ
V LSB. Circuitry for additional protection against power
supply disturbances has been shown. A 100
µ
F capacitor at each
+15V
+5V
≠15V
100µF
100µF
100µF
AD677
10µF
10µF
0.1µF
0.1µF
0.1µF
78L12
79L12
0.01µF
0.01µF
V
IN
V
REF
V
DD
V
CC
V
EE
V
IN
V
O
NR
GND
V
IN
10µF
0.1µF
1µF
AD587
10µF
4
2
6
8
0.1µF
10
10
10
10
Figure 7.
regulator prevents very large voltage spikes from entering the
regulators. Any power line noise which the regulators cannot
eliminate will be further filtered by an RC filter (10
/10
µ
F)
having a ≠3 dB point at 1.6 kHz. For best results the regulators
should be within a few centimeters of the AD677.
ANALOG INPUT
As previously discussed, the analog input voltage range for the
AD677 is
±
V
REF
. For purposes of ground drop and common
mode rejection, the V
IN
and V
REF
inputs each have their own
ground. V
REF
is referred to the local analog system ground
(AGND), and V
IN
is referred to the analog ground sense pin
(AGND SENSE) which allows a remote ground sense for the
input signal.
The AD677 analog inputs (V
IN
, V
REF
and AGND SENSE) ex-
hibit dynamic characteristics. When a conversion cycle begins,
each analog input is connected to an internal, discharged 50 pF
capacitor which then charges to the voltage present at the corre-
sponding pin. The capacitor is disconnected when SAMPLE is
taken LOW, and the stored charge is used in the subsequent
conversion. In order to limit the demands placed on the external
source by this high initial charging current, an internal buffer
amplifier is employed between the input and this capacitance for
a few hundred nanoseconds. During this time the input pin ex-
hibits typically 20 k
input resistance, 10 pF input capacitance
and
±
40
µ
A bias current. Next, the input is switched directly to
the now precharged capacitor and allowed to fully settle. During
this time the input sees only a 50 pF capacitor. Once the sample
is taken, the input is internally floated so that the external input
source sees a very high input resistance and a parasitic input
capacitance of typically only 2 pF. As a result, the only domi-
nant input characteristic which must be considered is the high
current steps which occur when the internal buffers are switched
in and out.
In most cases, these characteristics require the use of an external
op amp to drive the input of the AD677. Care should be taken
with op amp selection; even with modest loading conditions,
most available op amps do not meet the low distortion require-
ments necessary to match the performance capabilities of the
AD677. Figure 8 represents a circuit, based upon the AD845,
which will provide excellent overall performance.
For applications optimized more for low distortion and low
noise, the AD845 of Figure 8 may be replaced by the AD743.
+12V
≠12V
AD845
0.1µF
0.1µF
AGND
AGND
SENSE
±5V
INPUT
AD677
3
7
6
V
IN
4
2
1k
1k
499
Figure 8.
AD677
REV. A
≠12≠
AC PERFORMANCE
AC parameters, which include S/(N+D), THD, etc., reflect the
AD677's effect on the spectral content of the analog input sig-
nal. Figures 11 through 18 provide information on the AD677's
ac performance under a variety of conditions.
A perfect n-bit ADC with no errors will yield a theoretical quan-
tization noise of q/
12
, where q is the weight of the LSB. This
relationship leads to the well-known equation for theoretical
full-scale rms sine wave signal-to-noise plus distortion level of
S/(N + D) = 6.02 n + 1.76 dB, here n is the bit resolution. An
actual ADC, however, will yield a measured S/(N + D) less than
the theoretical value. Solving this equation for n using the mea-
sured S/(N + D) value yields the equation for effective number
of bits (ENOB):
ENOB
=
S / N
+
D
(
)
[
]
ACTUAL
≠ 1.76 dB
6.02
As a general rule, averaging the results from several conversions
reduces the effects of noise, and therefore improves such param-
eters as S/(N+D). AD677 performance may be optimized by
operating the device at its maximum sample rate of 100 kSPS
and digitally filtering the resulting bit stream to the desired sig-
nal bandwidth. This succeeds in distributing noise over a wider
frequency range, thus reducing the noise density in the fre-
quency band of interest. This subject is discussed in the follow-
ing section.
OVERSAMPLING AND NOISE FILTERING
The Nyquist rate for a converter is defined as one-half its sam-
pling rate. This is established by the Nyquist theorem, which
requires that a signal be sampled at a rate corresponding to at
least twice its highest frequency component of interest in order
to preserve the informational content. Oversampling is a conver-
sion technique in which the sampling frequency is more than
twice the frequency bandwidth of interest. In audio applications,
the AD677 can operate at a 2
◊
F
S
oversampling rate, where
F
S
= 48 kHz.
In quantized systems, the informational content of the analog
input is represented in the frequency spectrum from dc to the
Nyquist rate of the converter. Within this same spectrum are
higher frequency noise and signal components. Antialias, or low
pass, filters are used at the input to the ADC to reduce these
noise and signal components so that their aliased components
do not corrupt the baseband spectrum. However, wideband
noise contributed by the AD677 will not be reduced by the
antialias filter. The AD677 quantization noise is evenly distrib-
uted from dc to the Nyquist rate, and this fact can be used to
minimize its overall affect.
The AD677 quantization noise effects can be reduced by over-
sampling--sampling at a rate higher than that defined by the
Nyquist theorem. This spreads the noise energy over a band-
width wider than the frequency band of interest. By judicious
selection of a digital decimation filter, noise frequencies outside
the bandwidth of interest may be eliminated.
The process of analog to digital conversion inherently produces
noise, known as quantization noise. The magnitude of this noise
is a function of the resolution of the converter, and manifests it-
self as a limit to the theoretical signal-to-noise ratio achievable.
This limit is described by S/(N + D) = (6.02n + 1.76 + 10 log
F
S
/2F
A
) dB, where n is the resolution of the converter in bits,
F
S
is the sampling frequency, and Fa is the signal bandwidth of
interest. For audio bandwidth applications, the AD677 is ca-
pable of operating at a 2
◊
oversample rate (96 kSPS), which
typically produces an improvement in S/(N+D) of 3 dB com-
pared with operating at the Nyquist conversion rate of 48 kSPS.
Oversampling has another advantage as well; the demands on
the antialias filter are lessened. In summary, system perfor-
mance is optimized by running the AD677 at or near its maxi-
mum sampling rate of 100 kHz and digitally filtering the
resulting spectrum to eliminate undesired frequencies.
DC PERFORMANCE
The self-calibration scheme used in the AD677 compensates for
bit weight errors that may exist in the capacitor array. This mis-
match in capacitor values is adjusted (using the calibration coef-
ficients) during conversion and provides for excellent dc
linearity performance. Figure 19 illustrates the DNL plot of a
typical AD677 at +25
∞
C. A histogram test is a statistical method
for deriving an A/D converter's differential nonlinearity. A ramp
input is sampled by the ADC and a large number of conversions
are taken and stored. Theoretically the codes would all be the
same size and, therefore, have an equal number of occurrences.
A code with an average number of occurrences would have a
DNL of "0". A code with more or less than average will have a
DNL of greater than or less than zero LSB. A DNL of ≠1 LSB
indicates missing code (zero occurrences).
Figure 20 illustrates the code width distribution of the DNL
plots of Figure 19.
DC CODE UNCERTAINTY
Ideally, a fixed dc input should result in the same output code
for repetitive conversions. However, as a consequence of un-
avoidable circuit noise within the wideband circuits in the ADC,
there is range of output codes which may occur for a given input
voltage. If you apply a dc signal to the AD677 and record
10,000 conversions, the result will be a distribution of codes as
shown in Figure 9 (using a 10 V reference). If you fit a Gaussian
probability distribution to the histogram, the standard deviation
is approximately equivalent to the rms input noise of ADC.
1
≠1
≠2
DEVIATION FROM CORRECT CODE ≠ LSBs
NUMBER OF CODE HITS
8000
0
2000
4000
6000
0
7000
5000
3000
1000
3
1267
7649
1081
Figure 9. Distribution of Codes from 10,000 Conversions
Relative to the Correct Code

AD677
REV. A
≠13≠
The standard deviation of this distribution is approximately
0.5 LSBs. If less uncertainty is desired, averaging multiple con-
versions will narrow this distribution by the inverse of the square
root of the number of samples; i.e., the average of 4 conversions
would have a standard deviation of 0.25 LSBs.
DSP INTERFACE
Figure 10 illustrates the use of the Analog Devices ADSP-2101
digital signal processor with the AD677. The ADSP-2101 FO
(flag out) pin of Serial Port 1 (SPORT 1) is connected to the
SAMPLE line and is used to control acquisition of data. The
ADSP-2101 timer is used to provide precise timing of the FO
pin.
ADSP-2101
FO
AD677
SAMPLE
SERIAL
PORT 0
CLK
BUSY
SCLK0
DR0
RFS0
DT0
TFS0
SDATA
Figure 10. ADSP-2101 Interface
The SCLK pin of the ADSP-2101 SPORT0 provides the CLK
input for the AD677. The clock should be programmed to be
approximately 2 MHz to comply with AD677 specifications. To
minimize digital feedthrough, the clock should be disabled (by
setting Bit 14 in SPORT0 control register to 0) during data ac-
quisition. Since the clock floats when disabled, a pulldown resis-
tor of 12 k
≠15 k
should be connected to SCLK to ensure it
will be LOW at the falling edge of SAMPLE. To maximize the
conversion rate, the serial clock should be enabled immediately
after SAMPLE is brought LOW (hold mode).
The AD677 BUSY signal is connected to RF0 to notify
SPORT0 when a new data word is coming. SPORT0 should be
configured in normal, external, noninverting framing mode and
can be programmed to generate an interrupt after the last data
bit is received. To maximize the conversion rate, SAMPLE
should be brought HIGH immediately after the last data bit is
received.
102
9.5
86
82
2.5
90
94
98
8.5
4.5
3.5
V
REF
≠ Volts
dB
106
5.5
6.5
7.5
THD
S/(N+D)
10.0
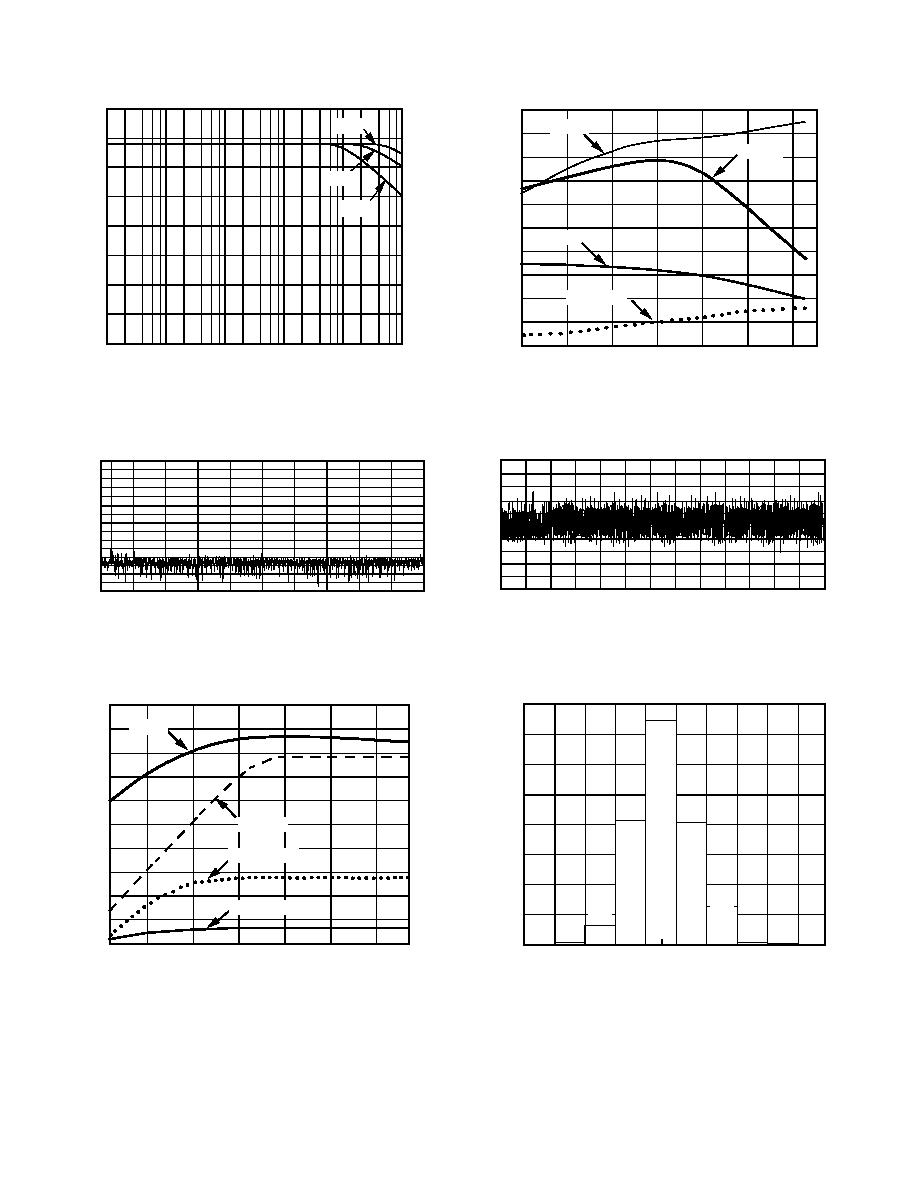
Figure 11. S/(N+D) and THD vs. V
REF
, f
S
= 100 kHz (Calibra-
tion is not guaranteed below +5 V
REF
)
INPUT LEVEL ≠ dB
105
10
0
40
20
≠70
30
≠80
70
50
60
80
90
100
≠10
≠20
≠30
≠40
≠50
≠60
THD
S/(N+D)
dB
Figure 12. S/(N+D) and THD vs. Input Amplitude,
f
S
= 100 kHz
0
≠20
≠40
≠60
≠80
≠100
≠120
≠140
0
5
10
15
20
25
30
35
40
45
50
FREQUENCY ≠ kHz
AMPLITUDE ≠ dB
Figure 13. 4096 Point FFT at 100 kSPS, f
IN
= 1 kHz,
V
REF
= 5 V
0
≠20
≠40
≠60
≠80
≠100
≠120
≠140
0
5
10
15
20
25
30
35
40
45
48
FREQUENCY ≠ kHz
AMPLITUDE ≠ dB
Figure 14. 4096 Point FFT at 100 kSPS, f
IN
= 1 kHz,
V
REF
= 10 V
AD677
REV. A
≠14≠
90
80
70
60
50
RIPPLE FREQUENCY ≠ Hz
S/(N+D) ≠ dB
0
100
1k
10k
100k
1M
30
20
40
+12V
≠12V
+5V
Figure 15. AC Power Supply Rejection (f
IN
= 1.06 kHz)
f
SAMPLE
= 96 kSPS, V
RIPPLE
= 0.13 V p-p
0
≠30
≠50
≠70
≠90
≠110
≠130
≠150
0
5
10
15
20
25
30
35
40
45
48
FREQUENCY ≠ kHz
AMPLITUDE ≠ dB
Figure 16. IMD Plot for f
IN
= 1008 Hz (fa), 1055 Hz (fb) at
96 kSPS
450
570
550
530
510
490
CLK PERIOD ≠ ns
470
590
104
86
90
88
92
94
96
98
100
102
dB
106
THD, 5V
S/(N+D), 10V
S/(N+D), 5V
THD, 10V
Figure 17. AC Performance vs. Clock Period, T
A
= +85
∞
C
(5 V and 10 V Reference)
104
86
90
88
≠20
≠40
92
94
96
98
100
102
80
60
40
20
0
dB
106
TEMPERATURE ≠ Degree ∞C
S/(N+D), 5V
THD, 10V
S/(N+D), 10V
THD, 5V
Figure 18. AC Performance Using Minimum Clock Period
vs. Temperature (t
CLK
= 480 ns), 5 V and 10 V Reference
0
5
10
15
20
25
30
35
40
45
50
FREQUENCY ≠ kHz
AMPLITUDE ≠ dB
55
60
65
1.0
0.8
0.6
0.4
0.2
0.0
≠0.2
≠0.4
≠0.6
≠0.8
≠1.0
Figure 19. DNL Plot at V
REF
= 10 V, T
A
= +25
∞
C, f
S
=
100 kSPS
DNL ≠ LSBs
0
NUMBER OF CODES WITH EACH DNL
32000
0
8000
14000
22000
26000
18000
12000
4000
.05
.15
.25
.35
.40
≠.05
≠.15
≠.25
≠.35
152
2
2500
14645
30671
14113
2993
392
60
6
Figure 20. DNL Error Distribution (Taken from Figure 19)
AD677
REV. A
≠15≠
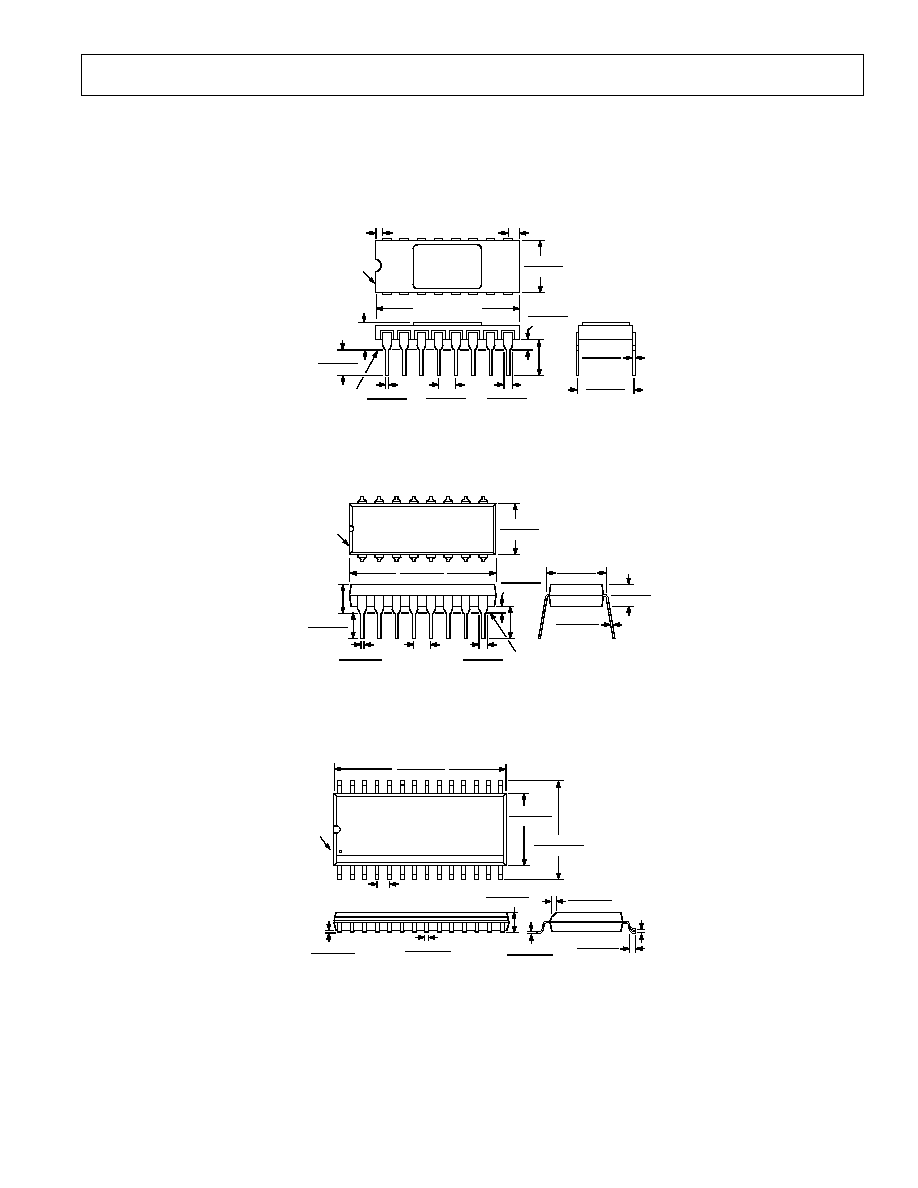
OUTLINE DIMENSIONS
Dimensions shown in inchcs and (mm)
D-16
16-Lead Side Brazed Ceramic DIP Package
8
1
9
16
PIN 1
0.840 (21.34) MAX
0.060 (1.52)
0.015 (0.38)
0.015 (0.38)
0.008 (0.20)
0.320 (8.13)
0.290 (7.37)
0.150
(3.81)
MIN
0.200
(5.08)
MAX
0.200 (5.08)
0.125 (3.18)
0.023 (0.58)
0.014 (0.36)
0.110 (2.79)
0.090 (2.29)
0.070 (1.78)
0.030 (0.76)
PLANE
SEATING
0.080 (2.03) MAX
0.005 (0.13) MIN
0.310 (7.87)
0.220 (5.59)
N-16
16-Lead Plastic DIP
PIN 1
0.060 (1.52)
0.015 (0.38)
0.015 (0.381)
0.008 (0.204)
0.150
(3.81)
MIN
0.210
(5.33)
MAX
0.022 (0.558)
0.014 (0.356)
0.070 (1.77)
0.045 (1.15)
PLANE
SEATING
0.840 (21.33)
0.745 (18.93)
8
1
9
16
0.325 (8.25)
0.300 (7.62)
0.280 (7.11)
0.240 (6.10)
0.195 (4.95)
0.115 (2.93)
0.200 (5.05)
0.125 (3.18)
0.100 (2.54)
BSC
R-28
28-Lead Wide Body SOIC (SOIC-28)
0.0500 (1.27)
BSC
0.0192 (0.49)
0.0138 (0.35)
0.0118 (0.30)
0.0040 (0.10)
0.7125 (18.10)
0.6969 (17.70)
0.4193 (10.65)
0.3937 (10.00)
0.2992 (7.60)
0.2914 (7.40)
PIN 1
0.1043 (2.65)
0.0926 (2.35)
0.0500 (1.27)
0.0157 (0.40)
0.0125 (0.32)
0.0091 (0.23)
0
∞-
8
∞
0.0291 (0.74)
0.0098 (0.25)
X
45
∞
14
15
1
28

C1786≠18≠4/93
PRINTED IN U.S.A.
≠16≠