 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: CD6420 | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |

Preliminary Product Information
This document contains information for a new product.
Cirrus Logic reserves the right to modify this product without notice.
1
Copyright
©
Cirrus Logic, Inc. 1997
(All Rights Reserved)
Cirrus Logic, Inc.
Crystal Semiconductor Products Division
P.O. Box 17847, Austin, Texas 78760
(512) 445 7222 FAX: (512) 445 7581
http://www.crystal.com
CS6420
Full-Duplex Speakerphone Chip
Features
l
Single-chip full-duplex hands-free operation
l
Automatic gain control
l
Optional 34 dB microphone preamplifier
l
Integrated mute and volume control
l
Integrated 80 dB IDR dual codec
l
Speech-trained Network and Acoustic Echo
Cancellers
l
Powerdown mode
l
Microcontroller Interface
General Description
Most modern speakerphones use half-duplex operation,
which switches transmission between the far-end talker
and the speakerphone user. This is done because the
acoustic coupling between the speaker and microphone
is much higher in speakerphones than in handsets
where the coupling is mechanically suppressed.
The CS6420 enables full-duplex conversation with a sin-
gle-chip solution. The CS6420 can easily replace
existing half-duplex speakerphone ICs with a huge in-
crease in conversation quality.
The CS6420 consists of telephone & audio interfaces,
two codecs and an echo-cancelling DSP.
ORDERING INFORMATION
CS6420-CS
20-pin SOIC
CDB6420
Evaluation Board
BANDGAP
AO
DGND
NI
DATA
STROBE
DRDY
CLKI
CLKO
API
RST
Microcontroller Interface
NO
AVDD
DVDD
AVDD
NC4
NC3
NC2
NC1
AGND
AD
C
0,6,9.5,12 dB
H
i
gh P
a
s
s
Filt
e
r
Rx
AG
C
Rx
S
u
ppr
es
s
i
on
Hal
f
Dupl
e
x
Mu
te
/V
o
l
u
m
e
Co
ntr
o
l
DA
C
+
-
Pre-Emphasis
Network
Echo Canceller
Filter
AD
C
0,6,9.5,12 dB
Filt
e
r
Hg
i
h
P
a
s
s
Tx
A
G
C
S
u
ppre
s
s
i
on
Tx
Hal
f
D
upl
ex
Con
t
r
o
l
Mu
te
/V
o
l
u
m
e
DA
C
+
-
Filter
Echo Canceller
Acoustic
Pre-Emphasis
APO
MB
34 dB
1 k
2.12 V
3.5 V
Clock
Generation
JUN `97
DS205PP2

CS6420
2
DS205PP2
TABLE OF CONTENTS
Absolute Maximum Ratings ..............................................................................................4
Recommended Operating Conditions..............................................................................4
Power Consumption ..........................................................................................................4
Analog Characteristics ........................................................................................................4
Analog Transmission Characteristics..............................................................................5
Microphone Amplifier ........................................................................................................5
Digital Characteristics .......................................................................................................5
Overview ............................................................................................................................8
Functional Description .....................................................................................................8
Analog Interface .......................................................................................................8
Acoustic Interface ..............................................................................................9
Network Interface ............................................................................................10
Microcontroller Interface .........................................................................................10
Description ......................................................................................................10
Register Definitions .........................................................................................11
Register 0..................................................................................................12
Mic - Microphone Preamplifier Enable ...............................................12
TSD - Transmit Suppression Disable.................................................12
GB - Graded Beta ..............................................................................12
ACC - Acoustic Coefficient Control ....................................................13
RVol - Receive Volume Control .........................................................13
TGain - Transmit Analog Gain ...........................................................13
Register 1..................................................................................................14
HD - Half-Duplex Disable...................................................................14
RSD - Receive Suppression Disable .................................................14
Taps - AEC/NEC Tap Allocation ........................................................15
NCC - Network Coefficient Control ....................................................15
TVol - Transmit Volume Control.........................................................15
RGain - Receive Analog Gain............................................................15
Register 2..................................................................................................16
NErle - Network ERLE Threshold ......................................................16
NFNse - Network Full-Duplex Noise Threshold .................................16
RHDet - Receive Half-Duplex Detection Threshold ...........................17
HDly - Half-Duplex Holdover Delay....................................................17
NseRmp - Background Noise Power Estimator Ramp Rate..............17
RSThd - Receive Suppression Threshold..........................................17
PCSen- Path Change Sensitivity .......................................................17
Register 3..................................................................................................18
AErle - Acoustic ERLE Threshold ......................................................18
AFNse - Acoustic Full-Duplex Noise Threshold.................................18
THDet - Transmit Half-Duplex Detection Threshold ..........................18
TSAtt - Transmit Suppression Attenuation.........................................19
TSBias - Transmit Suppression Bias .................................................19
TSThd - Transmit Suppression Threshold .........................................19
HHold - Hold in Half-Duplex on Howl.................................................19
Reset ...............................................................................................................19
Clocking ..................................................................................................................19
Power Supply .........................................................................................................20
Power Down Mode ..........................................................................................20
Noise and Grounding ......................................................................................21
Design Considerations ...................................................................................................22
Algorithmic Considerations .....................................................................................22
Full-Duplex Mode ............................................................................................22
Theory of Operation ..................................................................................22
Adaptive Filter ...........................................................................................23
Pre-Emphasis ....................................................................................23
Graded Beta.......................................................................................23
Update Control ..........................................................................................24

CS6420
DS205PP2
3
Speech Detection ..................................................................................... 24
Half-Duplex Mode ........................................................................................... 24
AGC ................................................................................................................ 25
Suppression .................................................................................................... 25
Transmit Suppression............................................................................... 26
Receive Suppression ................................................................................ 27
Circuit Design ......................................................................................................... 27
Interface Considerations ................................................................................. 27
Analog Interface........................................................................................ 27
Microcontroller Interface ........................................................................... 27
Grounding Considerations .............................................................................. 28
Layout Considerations .................................................................................... 28
System Design ....................................................................................................... 28
Gain Structure ................................................................................................. 28
Testing Issues ................................................................................................. 29
ERLE ........................................................................................................ 29
Convergence Time ................................................................................... 30
Half-Duplex Switching............................................................................... 30
Pin Descriptions .............................................................................................................. 31
Analog Interface .............................................................................................. 31
Microcontroller Interface ................................................................................. 32
Clock ............................................................................................................... 32
Power Supply .................................................................................................. 32
Miscellaneous ................................................................................................. 33
Glossary ........................................................................................................................... 34
Package Dimensions ...................................................................................................... 37
CS6420
4
DS205PP2
WARNING: Operation beyond these limits may result in permanent damage to the device.
Normal operation is not guaranteed at these extremes.
Notes: 1. AO and NO outputs are not loaded.
Notes: 2. These parameters are guaranteed by design or by characterization.
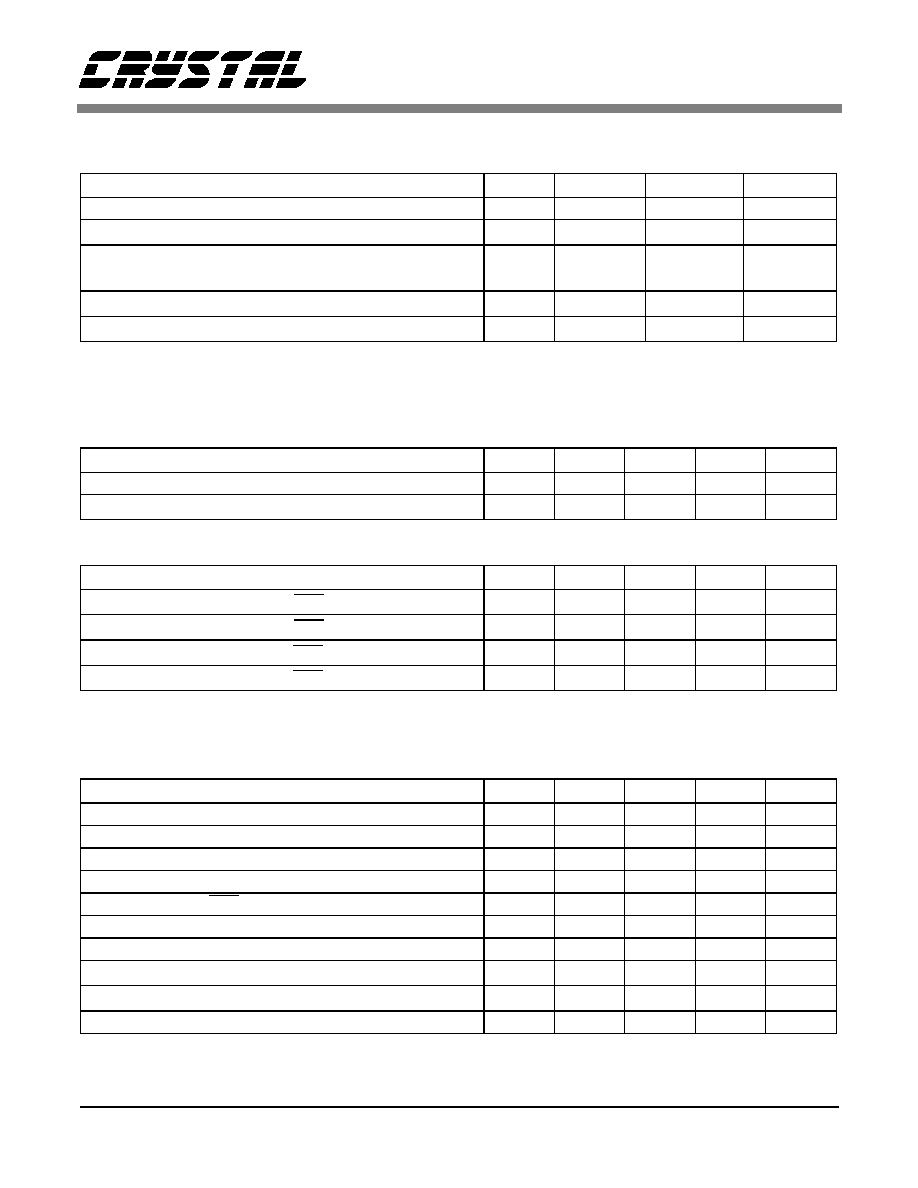
ABSOLUTE MAXIMUM RATINGS
Parameter
Symbol
Min
Max
Units
DC Supply (AVDD, DVDD)
-0.3
6.0
V
Input Current (Except supply pins)
I
in
-10
+10
mA
Input Voltage
Analog
Digital
V
ina
V
ind
-0.3
-0.3
AVDD+0.3
DVDD+0.3
V
Ambient Operating Temperature
T
A
-40
85
∞C
Storage Temperature
T
stg
-65
150
∞C
RECOMMENDED OPERATING CONDITIONS
Parameter
Symbol
Min
Typ
Max
Units
DC Supply (AVDD, DVDD)
4.5
5.0
5.5
V
Ambient Operating Temperature
T
AOp
0
25
70
∞C
POWER CONSUMPTION
(T
A
= 25∞C, DVDD = AVDD = 5V, f
XTAL
= 20.480 MHz) (Note 1)
Parameter
Symbol
Min
Typ
Max
Units
Power Supply Current, Analog (RST=0)
P
DA0
1
mA
Power Supply Current, Analog (RST=1)
P
DA
10
20
mA
Power Supply Current, Digital (RST=0)
P
DD0
1
mA
Power Supply Current, Digital (RST=1)
P
DD
50
60
mA
ANALOG CHARACTERISTICS
(T
A
= 25∞C, DVDD = AVDD = 5V, f
XTAL
= 20.480 MHz)
Parameter
Symbol
Min
Typ
Max
Units
Input Offset Voltage (APO, NI)
2.12
V
Output Offset Voltage (AO, NO)
2.12
V
Transmit Group Delay
(Note 2)
6
ms
Receive Group Delay
(Note 2)
6
ms
Settling Time from RST rising
104
ms
MB Output Voltage
3.5
V
MB Drive Capability
10
µ
A
Input Impedance (APO, NI)
(Note 2)
Z
in
300
k
Load Impedance (AO, NO)
(Note 2)
Z
load
10
k
Power Supply Rejection (1 kHz)
40
dB

CS6420
DS205PP2
5
ANALOG TRANSMISSION CHARACTERISTICS
(T
A
= 25∞C, DVDD = AVDD = 5V, f
XTAL
=
20.480 MHz, RVol=TVol=RGain=TGain= 0 dB, HD=TSD=RSD=1, analog inputs and ouputs loaded with resistors
and capacitors as shown in the typical connection diagram, Figure 2)
Parameter
Symbol
Min
Typ
Max
Units
Idle Channel Noise
A-weighted (0-20 kHz)
(Inputs grounded
C-Message weighted (0-4 kHz)
through a capacitor)
Psophometrically weighted (0-4 kHz)
17
-67
-69
dBV
dBrnC0
dBm0p
Signal-to-Noise Ratio
A-weighted (0-20 kHz)
(Full Scale, 1 kHz
C-Message weighted (0-4 kHz)
sine wave input)
Psophometrically weighted (0-4 kHz)
SNR
69
17
-67
dB
dBrnC0
dBm0p
Total Harmonic Distortion
C-Message Weighted (0-4 kHz)
THD
0.1
%
Programmable Gain
RGain/TGain = 00
RGain/TGain = 01
RGain/TGain = 10
RGain/TGain = 11
0
6
9.5
12
dB
Volume Control Stepsize (TVol/RVol)
3
dB
ADC Full-scale Voltage Input
0.9
1.0
Vrms
DAC Full-scale Voltage Output
1.0
1.1
Vrms
ADC Noise Floor
C-Message Weighted (0-4 kHz)
-80
dBV
DAC Noise Floor, DAC muted C-Message Weighted (0-4 kHz)
-85
dBV
MICROPHONE AMPLIFIER
(T
A
= 25∞C, DVDD = AVDD = 5V,f
XTAL
= 20.480 MHz)
Parameter
Symbol
Min
Typ
Max
Units
Gain (Zsource = 50
)
A
mic
34
dB
Signal-to-Noise Ratio
A-weighted (0-20 kHz)
SNR
m
63
dB
Input Impedance
Z
inm
5
k
Input Offset Voltage
V
offm
2.12
V
DIGITAL CHARACTERISTICS
(T
A
= 25∞C, DVDD = AVDD = 5V,f
XTAL
= 20.480 MHz)
Parameter
Symbol
Min
Typ
Max
Units
High-Level Input Voltage
V
IH
DVDD-1.0
V
Low-Level Input Voltage
V
IL
1.0
V
Input Leakage Current
I
leak
10
µ
A
Input Capacitance
C
IN
5
pF

CS6420
6
DS205PP2
SWITCHING CHARACTERISTICS
Parameter
Symbol
Min
Typ
Max
Units
Input rise time
t
rise
1.0
µs
RST low time
t
RSTL
1.0
µs
CLKI frequency
f
XTAL
18.432
20.480
22.528
MHz
CLKI duty cycle
t
LCLKI
40
50
60
%
DRDY frequency
f
DRDY
DC
f
XTAL
/ 2560
kHz
STROBE frequency
f
STROBE
DC
9.0
MHz
DRDY to STROBE setup time
t
sDRDY
30
ns
DATA to STROBE setup time
t
sDATA
30
ns
STROBE to DATA hold time
t
hDATA
30
ns
STROBE to DRDY hold time
t
hDRDY
30
ns
Bit15
DATA
DRDY
STROBE
Bit14
Bit0
t sDRDY
t sDATA
t hDATA
t hDRDY
Figure 1. Microcontroller Interface Switching Characteristics

CS6420
DS205PP2
7
AVDD
AGND
API
APO
MB
AO
CLKO
CLKI
STROBE
DATA
DRDY
NI
NO
DGND
DVDD
0.1
µ
F
1
µ
F
+
0.1
µ
F
1
µ
F
+
0.47
µ
F
10
µ
F
22pF
Telephone
Line Out
Telephone
Line In
From
Microprocessor
22pF
+5V Analog
0.022
µ
F
0.1
µ
F
+
RST
NC1
NC2
NC3
NC4
1
2
20
18
19
3
3300pF
12.1 k
13
14
9
10
11
12
20.480 MHz
8
6
5
7
3300 pF
6.04 k
0.47
µ
F
3300 pF
12.1 k
17
4
15
16
ferrite bead
1.5 k
+5V Analog
10 k
Figure 2. Typical Connection Diagram (Microphone Preamplifier Enabled)
AVDD
AGND
API
APO
MB
AO
CLKO
CLKI
STROBE
DATA
DRDY
NI
NO
DGND
DVDD
0.1
µ
F
1
µ
F
+
0.1
µ
F
1
µ
F
+
0.47
µ
F
10
µ
F
22pF
Telephone
Line Out
Telephone
Line In
From
Microprocessor
22pF
+5V Analog
0.1
µ
F
+
RST
NC1
NC2
NC3
NC4
1
2
20
18
19
3
3300pF
12.1 k
13
14
9
10
11
12
20.480 MHz
8
6
5
7
3300 pF
6.04 k
0.47
µ
F
3300 pF
12.1 k
17
4
15
16
ferrite bead
3300 pF
0.47
µ
F
near-end
input
6.04 k
Figure 3. Typical Connection Diagram (Microphone Preamplifier Disabled)

CS6420
8
DS205PP2
OVERVIEW
The CS6420 is a full-duplex speakerphone chip for
use in hands-free communications with telephony
quality audio. Common applications include
speakerphones, inexpensive video-conferencing,
and cellular phone car kits. The CS6420 requires
very few external components and allows system
control through a microcontroller interface.
Hands-free communication through a microphone
and speaker typically results in acoustic feedback
or howling because the loop gain of the system ex-
ceeds unity by the time audio amplitudes are ad-
justed to a reasonable level. The solution to the
howling problem has typically been half-duplex,
where either the transmit or the receive channel is
active, never both at the same time. This prevents
the howling, but diminishes the overall communi-
cation quality by clipping words and forcing the
talker at each end to wait for the talker at the other
end to stop speaking.
Full-duplex conversation, where both transmit and
receive channels are active simultaneously, is the
conversation quality we enjoy when using hand-
sets. Full-duplex for hands-free communications is
achieved in the CS6420 using a digital signal pro-
cessing technique called "Echo Cancellation." The
end result is a more natural conversation than half-
duplex, with no awkward breaks and pauses, as if
both parties were speaking to each other directly.
Echo Cancellation reduces overall loop gain and
the acoustic coupling between speaker and micro-
phone. This coupling reduction prevents the annoy-
ing effect of hearing one's own delayed speech, the
effect being worse when there is delay in the sys-
tem, such as vocoder delay in digital cellular
phones.
The CS6420 is a complete system implementation
of a Digital Signal Processor with RAM and pro-
gram ROM, running Echo Cancellation algorithms
developed at Crystal Semiconductor using custom-
er input, integrated with two delta-sigma codecs.
The CS6420 is intended to provide a full-duplex
speakerphone solution with a minimum of design
effort while displacing existing half-duplex speak-
erphone chips.
FUNCTIONAL DESCRIPTION
The CS6420 is roughly divided into four external
interface blocks. The analog interfaces connect the
chip to the transmit and receive paths. Certain con-
trol functions are accessible through the microcon-
troller interface. Two pins accommodate either a
crystal or an externally applied digital clock signal.
Analog and digital power and ground are provided
through four pins.
Analog Interface
In a speakerphone application, one input of the
CS6420 connects to the signal from the micro-
phone, sometimes called the near-end input or
transmit input, and one output connects to the
speaker. The output that leads to the speaker is
sometimes called the near-end output or receive
output. Together, the input and output that connect
to the microphone and speaker are referred to as the
Acoustic Interface.
The signal received at the near-end input is then
passed to the far-end output or transmit output after
acoustic echo cancellation. This signal is sent to the
telephone line. The signal from the telephone line
is received at the far-end input, also called the re-
ceive input, and this signal is passed to the receive
output after network echo cancellation. Together,
the far-end input and output form the Network In-
terface.
The analog interfaces are physically implemented
using delta sigma converters running at an output
word rate of 8 kHz, resulting in a passband from
DC to 4 kHz. Because the inputs are analog to dig-
ital converters (ADCs), certain design consider-
ations must be kept in mind: specifically, anti-
aliasing and full-scale input voltage. The ADCs ex-
pect a single-pole RC filter with a corner at 8 kHz,
CS6420
DS205PP2
9
and they are post-compensated internally to pre-
vent any resultant passband droop. The ADCs also
expect a maximum of 1 V
rms
(2.8 V
pp
) at their in-
puts (which are biased around 2.12 VDC). A signal
of higher amplitude will clip the ADC input and
may result in poor echo canceller performance. See
the Design Considerations section for more details.
The outputs are delta-sigma digital to analog con-
verters (DACs) and have similar requirements to
the ADCs. The DACs are pre-compensated to ex-
pect a single-pole RC filter with a corner frequency
at 4 kHz. The full scale voltage output from a DAC
is 1 V
rms
(2.8 V
pp
) swinging around a DC bias of
2.12 V.
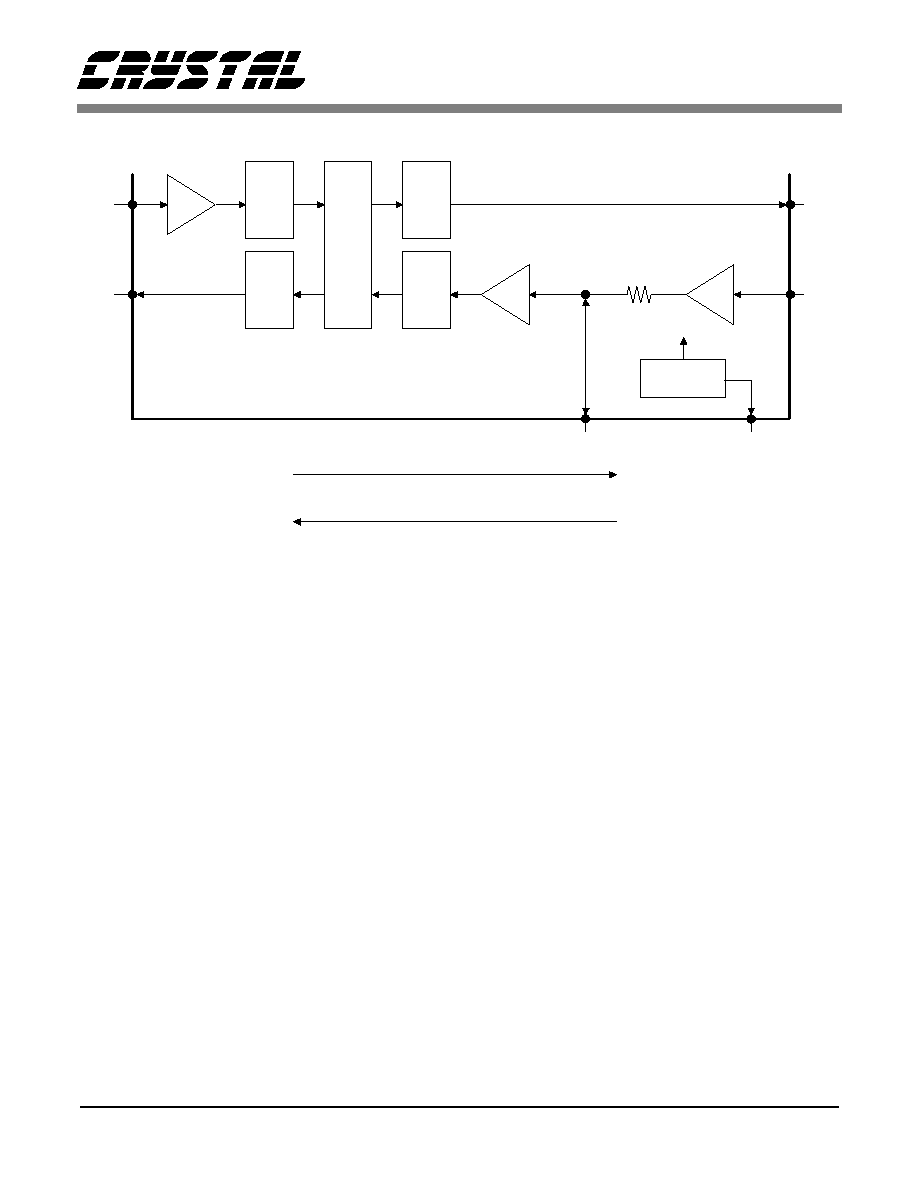
Acoustic Interface
The pins API (pin 20), APO (pin 18), MB (pin 19),
and AO (pin 3) make up the Acoustic Interface. A
block diagram of the Acoustic Interface is shown in
Figure 4.
API and APO are, respectively, the input and out-
put of the built-in analog pre-amplifier. The pre-
amplifier is an inverting amplifier with a fixed gain
of 34 dB biased around an input offset voltage
(V
off
) of 2.12 V. APO is the output of the pre-am-
plifier after a 1 k
resistor. The circuitry connected
to the amplifier input must present low source im-
pedance (<100
) to the API pin or the gain will be
reduced. When using the pre-amplifier, connecting
a 0.022
µ
F capacitor to ground off APO will pro-
vide the anti-aliasing filter required by the ADC, as
shown in Figure 2. The pre-amplifier may be by-
passed by clearing Mic (Register 0, bit 15) using the
Microcontroller Interface (see Microcontroller In-
terface section), grounding API through a capacitor,
and driving APO directly. In this case, the signal into
APO must be low-pass filtered by a single-pole RC
filter with a corner frequency at 8 kHz (see Figure 3).
Following the pre-amplifier is a programmable an-
alog gain stage (PGA) which is controllable
through the Microcontroller Interface. This gain
19 MB
18 APO
20
AO
0,6,9.5,12 dB
ADC
DAC
DAC
ADC
D
S
P
NI
17
NO
4
FAR-END
Transmit Path
Receive Path
API
3.5V
2.12V
1k
BANDGAP
34 dB
0,6,9.5,12 dB
NEAR-END
3
PGA
PGA
Figure 4. Analog Interface

CS6420
10
DS205PP2
stage allows gains of 0 dB, 6 dB, 9.5 dB, and 12 dB
to be added prior to the ADC input. The default
gain stage setting is 0 dB.
The signal at APO should not exceed 2.8 V
pp
at the
default gain stage setting. If other gain stages are
used then the full-scale signal at APO must also
change. Table 1 shows full-scale voltages as mea-
sured at APO for given programmable gains:
Table 1. Full scale voltages for each gain stage.
MB provides a stable 3.5 VDC output from the on-
board voltage reference of the CS6420. MB may
not be connected to any load. MB serves to provide
decoupling for the internal 2.12 VDC bandgap ref-
erence, and must have a 0.1
µ
F and a 10
µ
F capac-
itor to ground for bypass. Noise on MB will
strongly influence the overall analog perfor-
mance of the CS6420.
The acoustic output, AO, should connect to a sin-
gle-pole low-pass RC network with a corner fre-
quency of 4 kHz, which will filter out-of-band
components. The maximum voltage swing at AO is
2.8 V
pp
. AO is capable of driving down to a 10 k
load.
Network Interface
The pins NI (pin 17) and NO (pin 4) make up the
Network Interface. The details of the Network In-
terface are shown in Figure 4.
NI is the input from the telephone network side into
the CS6420. The signal into NI must be low pass
filtered by a single-pole RC filter with a corner fre-
quency of 8 kHz.
A programmable analog gain stage (PGA) accessi-
ble through the Microcontroller Interface amplifies
signals received at NI. This gain stage allows gains
of 0 dB, 6 dB, 9.5 dB, and 12 dB to be added prior
to the ADC input. The default gain stage setting for
the network side is 0 dB.
The signal at NI should not exceed 2.8 V
pp
at the
default gain stage setting. If other gain stages are
used then the full-scale signal at NI must also
change. Table 1 shows full-scale voltages as mea-
sured at NI for given programmable gains.
The output to the telephone network side, NO,
should connect to a single pole RC network with a
corner frequency at 4 kHz, which will filter out-of-
band components. The maximum swing NO is ca-
pable of producing is 2.8 V
pp
. NO is capable of
driving down to a 10 k
load.
Microcontroller Interface
Several control functions of the CS6420 are acces-
sible through its Microcontroller Interface, which
consists of three pins: DATA (pin 8), STROBE
(pin 7), and DRDY (pin 6). These inputs are intend-
ed to connect to the outputs of a microcontroller to
allow write-only access to the 16-bit Microcontrol-
ler Control Register (MCR).
The RST (pin 5) pin, which affects the entire inte-
grated circuit, is especially significant to the Micro-
controller Interface. RST is used to place the
CS6420 into a known state of operation. Two sub-
types of reset are possible: cold reset and warm re-
set.
Description
The Microcontroller Interface is implemented by a
serial shift register gated by DRDY. The microcon-
troller begins the transaction by setting DRDY low
and STROBE low. The most significant bit (MSB),
Bit 15, of the 16-bit data word should be presented
to the DATA pin and then STROBE should be
brought high to shift the data bit into the CS6420.
STROBE should be brought low again so it is ready
Gain Setting
Full-scale Voltage
0 dB
2.8 V
pp
6 dB
1.4 V
pp
9.5 dB
0.94 V
pp
12 dB
0.71 V
pp

CS6420
DS205PP2
11
to shift the next bit into the shift register. The next
data bit should then be presented to the DATA pin
ready to be latched by the rising edge of STROBE.
This procedure repeats for all sixteen bits as shown
in Figure 5. After the last bit has been shifted in,
DRDY should be brought high to indicate the con-
clusion of the transfer, and four extra STROBE
pulses must be applied to latch the data into the
CS6420.
Since the MCR is a shift register, the STROBE can
be run arbitrarily slow with a duty cycle limited
only by the hold time specified in the Switching
Characterstics table. The Microcontroller Interface
is read once every 125
µ
s, so it must not be updated
faster than this.
Register Definitions
The four control registers accessible through the
MCR are described in detail in the following tables.
These registers are addressed by bits b2 and b1 of
the MCR. Bit b0 must always be 0. Table 2 shows
the relative bit positions of all the registers. Tables
3 to 6 show the four control registers in more detail.
The Register Map at the top of each register de-
scription shows the names of all the bits, with their
reset values below the bitfield name. The reset val-
ue can also be found in the Word column of the bit-
field summary as indicated by an `*'.
Table 2. MCR Control Register Mapping
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
Mic
TSD
GB
ACC
RVol
TGain
0
0
0
HD
RSD
Taps
NCC
TVol
RGain
0
1
0
NErle
NFNse
RHDet
HDly
NseRmp
RSThd
PCSen
1
0
0
AErle
AFNse
THDet
TSAtt
TSBias
TSThd
HHold
1
1
0
Bit15
Bit14
Bit13
Bit12
Bit11
Bit10
Bit9
Bit8
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
DATA
DRDY
STROBE
1
2
3
4
four extra strobe pulses
Figure 5. Microcontroller Interface

CS6420
12
DS205PP2
Register 0
* Denotes reset value
Table 3. Register 0 Bit Definitions
Mic - Microphone Preamplifier Enable
The microphone preamplifier described in the
Acoustic Interface section is enabled by default, but
may be disabled by setting Mic to 0. Refer to the
Acoustic Interface section for more details on us-
ing/disabling the Microphone Preamplifier.
TSD - Transmit Suppression Disable
The Transmit Supplementary Echo Suppression
function is a non-linear echo control mechanism.
The Transmit Suppression will introduce TSAtt
(see Register 3) dB of attenuation into the transmit
path only when there is speech detected in the re-
ceive path and no near-end speech. When only
near-end speech is present, or if there is no speech
in either direction, the suppression attenuation is
removed. By default, the transmit suppression
function is enabled.
GB - Graded Beta
The room-size adjustment scheme called "graded
beta," provided for the acoustic echo canceller in the
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
Mic
TSD
GB
ACC
RVol
TGain
0
0
0
1
0
10
00
00100
00
0
0
0
Bits
Name
Function
Word
Operation
15
Mic
Microphone Preamplifier Enable
0
1*
disable preamp
enable preamp
14
TSD
Tx Suppression Disable
0*
1
enable Tx suppression
disable Tx suppression
13-12
GB
Graded Beta
00
01
10*
11
0.00 dB/ms
0.75 dB/ms
0.38 dB/ms
0.19 dB/ms
11-10
ACC
AEC Coefficient Control
00*
01
10
11
Normal
Clear
Freeze
reserved
9-5
RVol
Rx Volume Control
00000
00001
---
00100*
---
01010
01011
---
11101
11110
11111
+30 dB
+27 dB
+18 dB
+0 dB
-3 dB
-57 dB
-60 dB
mute
4-3
TGain
Tx Analog Gain
00*
01
10
11
0 dB
6 dB
9.5 dB
12 dB

CS6420
DS205PP2
13
CS6420, is controlled by GB. The network echo
canceller does not support graded beta.
Graded beta is an architectural enhancement to the
CS6420 which takes advantage of the fact that
acoustic echoes tend to decay exponentially with
time. The CS6420 can increase the beta, or update
gain, for the coefficients of the adaptive filter
which occur earlier in time and decrease it for those
that occur later in time, which increases conver-
gence speed while maintaining stability. In order to
make this improvement, there is an implicit assump-
tion that the decay rate of the echo is known. The
graded beta control allows the system designer to ad-
just this. For very acoustically live rooms, use either
no decay (00) or slight decay (11). Cars and acousti-
cally dead rooms can benefit from the most rapid de-
cay (01).
ACC - Acoustic Coefficient Control
The coefficients of the AEC adaptive filters in the
CS6420 are controlled by ACC. The default posi-
tion (00) yields normal operation, which means the
coefficients are free to adjust themselves to the
echo path in order to cancel echo. When set to the
clear position (01), the adaptive filter coefficients
are all held at zero, so the echo canceller is effec-
tively disabled. Note that unless the half-duplex
mode is disabled, this will force the CS6420 into
half-duplex mode. The freeze position (10) causes
the coefficients to hold their current values.
RVol - Receive Volume Control
Volume in the receive path is set by RVol. The vol-
ume control in the receive direction is implemented
by a peak-limiting automatic gain control (AGC)
and digital attenuation at the near-end output DAC.
The AGC is discussed in detail in the Design Con-
siderations section. See the sub-section on AGC
for a full explanation of how it functions.
When the reference level is set to +0 dB, the AGC
is effectively disabled. Volume control is imple-
mented by digital attenuation in 3 dB steps from
this point on down. The maximum gain is +30 dB
and the minimum is -60 dB in 3 dB steps. The low-
est gain setting (11111) mutes the receive path.
The default setting for the receive reference level is
+18 dB.
TGain - Transmit Analog Gain
TGain selects the amount of additional on-chip an-
alog gain to be supplied to the acoustic input of the
CS6420. A programmable gain amplifier (PGA)
exists before each ADC which allows 0 dB, 6 dB,
9.5 dB, or 12 dB of gain to be added to the signal
path. The acoustic side defaults to 0 dB of gain.
Note: Changing the analog gain will change the full-
scale voltage as applied to the input pin. Make
sure that the ADC input does not clip with the gain
stage on.

CS6420
14
DS205PP2
Register 1
* Denotes reset value
Table 4. Register 1 Bit Definitions
HD - Half-Duplex Disable
In normal operation, the CS6420 will be in a half-
duplex mode if the echo canceller is not providing
enough loop gain reduction to prevent howling.
This half-duplex mode would be active at power-
up, for example, before the adaptive filter has had a
chance to adapt. This half-duplex mode prevents
howling and also masks the convergence process.
In some cases, such as when measuring conver-
gence speed (see Testing Issues), the half-duplex
mode is undesirable. By default, the half-duplex
mode is enabled.
RSD - Receive Suppression Disable
The Receive Supplementary Echo Suppression
function is a non-linear echo control mechanism.
Supplementary Echo Suppression attenuates sig-
nals in the receive direction by 24 dB when far-end
speech is absent in the receive path. The attenua-
tion is released only when the receive channel is ac-
tive. It is also designed to not be triggered by
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
HD
RSD
Taps
NCC
TVol
RGain
0
1
0
0
0
10
00
01010
00
0
1
0
Bits
Name
Function
Word
Operation
15
HD
Half-Duplex Disable
0*
1
enable half-duplex
disable half-duplex
14
RSD
Rx Suppression Disable
0*
1
enable Rx suppression
disable Rx suppression
13-12
Taps
AEC/NEC Tap Allocation
00
01
10*
11
444/0 (55.5ms/disabled)
380/128 (47.5ms/16ms)
316/192 (39.5ms/24ms)
252/256 (31.5ms/32ms)
11-10
NCC
NEC Coefficient Control
00*
01
10
11
Normal
Clear
Freeze
reserved
9-5
TVol
Tx Volume Control
00000
00001
---
00100
---
01010*
01011
---
11101
11110
11111
+30 dB
+27 dB
+18 dB
+0 dB
-3 dB
-57 dB
-60 dB
mute
4-3
RGain
Rx Analog Gain
00*
01
10
11
0 dB
6 dB
9.5 dB
12 dB

CS6420
DS205PP2
15
network echo. By default, the receive suppression
function is enabled.
Taps - AEC/NEC Tap Allocation
The CS6420 has a total of 63.5 ms of echo canceller
taps that it can partition for use by the network and
acoustic echo cancellers. By default, the CS6420
allocates 39.5 ms for the AEC and 24 ms for the
NEC. Some applications will never have a network
echo path, and so should allocate all taps for the
AEC. See NErle and NFNse in Register 2, and
AErle and AFNse in Register 3 for more options
when an echo path is nonexistent.
NCC - Network Coefficient Control
The NEC adaptive filter's coefficients are con-
trolled by NCC. See ACC in Register 0 for more
details. The default setting for NCC is Normal
mode.
TVol - Transmit Volume Control
Volume in the transmit path is controlled by TVol.
Like receive volume, the transmit volume is con-
trolled by an AGC. See RVol in Register 0 for more
details. The default setting for the transmit refer-
ence level is +0 dB.
RGain - Receive Analog Gain
RGain selects the amount of additional on-chip an-
alog gain to be supplied to the network input of the
CS6420. A programmable gain amplifier (PGA)
exists before each ADC which allows 0 dB, 6 dB,
9.5 dB, or 12 dB of gain to be added to the signal
path. The network side defaults to 0 dB of gain.
Note: Changing the analog gain will change the full-
scale voltage as applied to the input pin. Make
sure that the ADC input does not clip with the gain
stage on.

CS6420
16
DS205PP2
Register 2
* Denotes reset value
Table 5. Register 2 Bit Definitions
NErle - Network ERLE Threshold
The CS6420 will allow full-duplex operation only
when the Network ERLE exceeds the threshold set
by NErle. See also NFNse. See Glossary for a def-
inition of ERLE.
NFNse - Network Full-Duplex Noise Threshold
NFNse works in conjunction with NErle to deter-
mine when the CS6420 should transition into full-
duplex operation. If the current noise level at the
far-end input is greater than NFNse, then NErle is
used to determine if full-duplex is allowed. If the
noise level is below the level of NFNse, the
CS6420 uses an internal estimate of asymptotic
performance to determine whether or not to transi-
tion to full-duplex. If NFNse is zero, NErle is al-
ways used as the full-duplex criterion. The other
values exist for cases where there is not a network
path to converge to, or the existence of a network
path can not be determined prior to placing a call.
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
NErle
NFNse
RHDet
HDly
NseRmp
RSThd
PCSen
1
0
0
00
00
00
00
00
00
0
1
0
0
Bits
Name
Function
Word
Operation
15-14
NErle
NEC ERLE Threshold
00*
01
10
11
24 dB
18 dB
30 dB
reserved
13-12
NFNse
NEC Full-Duplex Noise Threshold
00*
01
10
11
zero
-42 dB
-54 dB
reserved
11-10
RHDet
Rx Half-Duplex Detection Threshold
00*
01
10
11
5 dB
3 dB
6 dB
reserved
9-8
HDly
Half-Duplex Holdover Delay
00*
01
10
11
200 ms
100 ms
150 ms
reserved
7-6
NseRmp
Background Power Estimator Ramp Rate
00*
01
10
11
1 s
0.5 s
2 s
reserved
5-4
RSThd
Rx Suppression Threshold
00*
01
10
11
5 dB
3 dB
6 dB
reserved
3
PCSen
Path Change Sensitivity
0*
1
high sensitivity
low sensitivity

CS6420
DS205PP2
17
RHDet - Receive Half-Duplex Detection
Threshold
The sensitivity of the speech detector controls
channel switching and ownership in half-duplex
mode. The receive speech detector registers speech
if the receive channel signal power is RHDet above
the noise floor for the receive channel.
HDly - Half-Duplex Holdover Delay
After a channel goes idle in the half-duplex mode
of operation, a change of channel ownership is in-
hibited for HDly in order to prevent false switching
due to echoes. The half-duplex will be more im-
mune to false switching if this delay is longer, but
it will also prevent a fast response to legitimate
channel changes.
NseRmp - Background Noise Power Estimator
Ramp Rate
The background noise power estimators increase at
a rate of 3 dB/NseRmp until the background noise
power estimate equals the current input power esti-
mate. The background noise power estimators
quickly track drops in the current input power esti-
mate. Choose small values of NseRmp if the envi-
ronment is expected to have rapidly varying noise
levels. Choose large values of NseRmp if the envi-
ronment is expected to have relatively constant
noise power.
RSThd - Receive Suppression Threshold
This parameter sets the threshold for far-end
speech detection for disengaging receive suppres-
sion. The speech detector that disengages the re-
ceive suppression has its sensitivity controlled by
RSThd. The suppression is inserted into the receive
path unless signal from the far-end exceeds the re-
ceive channel noise power by RSThd, in which
case speech is assumed to be detected and the sup-
pression is defeated until speech is no longer de-
tected. Decreasing RSThd to make the speech
detector more sensitive could result in false detec-
tions due to spurious noise events which may cause
an unpleasant noise modulation at the near-end. In-
creasing RSThd to make it robust to spurious noise,
but may cause weak far-end talkers to not be heard.
RSThd does not affect the ability of the receive
suppressor to attenuate residual network echo.
PCSen- Path Change Sensitivity
The Acoustic Interface is likely to have many path
changes, for example, as people move about in the
room where the full-duplex speakerphone is being
used. The sensitivity of the path change detector
can be changed with the PCSen Bit. Set PCSen to 0
for high sensitivity and 1 for low sensitivity.
If PCSen is set to high, extended doubletalk may
cause the CS6420 to briefly drop into half-duplex.
When PCSen is set to low, brief echo may be heard
during path changes.

CS6420
18
DS205PP2
Register 3
* Denotes reset value
Table 6. Register 3 Bit Definitions
AErle - Acoustic ERLE Threshold
The CS6420 will allow full-duplex operation only
when the Acoustic ERLE it provides exceeds AEr-
le. See also AFNse. See Glossary for a definition
of ERLE.
AFNse - Acoustic Full-Duplex Noise Threshold
AFNse works in conjunction with AErle to deter-
mine when the CS6420 should transition into full-
duplex operation. If the current noise level at the
near-end input is greater than AFNse, then AErle is
used to determine if full-duplex is allowed. If the
noise level is below the level of AFNse, the
CS6420 uses an internal estimate of asymptotic
performance to determine whether or not to transi-
tion to full-duplex. If AFNse is zero, AErle is al-
ways used as the full-duplex criterion. The other
values exist for cases where there may not be an
acoustic path to converge to.
THDet - Transmit Half-Duplex Detection
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
AErle
AFNse
THDet
TSAtt
TSBias
TSThd
HHold
1
1
0
00
00
00
00
00
00
0
1
1
0
Bits
Name
Function
Word
Operation
15-14
AErle
AEC ERLE Threshold
00*
01
10
11
24 dB
18 dB
30 dB
reserved
13-12
AFNse
AEC Full-Duplex Noise Threshold
00*
01
10
11
zero
-42 dB
-54 dB
reserved
11-10
THDet
Tx Half-Duplex Detection Threshold
00*
01
10
11
5 dB
3 dB
6 dB
reserved
9-8
TSAtt
Tx Suppression Attenuation
00*
01
10
11
18 dB
12 dB
24 dB
reserved
7-6
TSBias
Tx Suppression Bias
00*
01
10
11
18 dB
15 dB
21 dB
reserved
5-4
TSThd
Tx Suppression Threshold
00*
01
10
11
15 dB
12 dB
9 dB
reserved
3
HHold
Hold in Half-Duplex on Howl
0*
1
disable
enable

CS6420
DS205PP2
19
Threshold
The sensitivity of the speech detector controls
channel switching and ownership in half-duplex
mode. The transmit speech detector registers
speech if the transmit channel signal power is TH-
Det above the noise floor of the transmit channel.
TSAtt - Transmit Suppression Attenuation
This parameter sets the amount of suppression at-
tenuation inserted into the transmit path when
transmit suppression is engaged.
TSBias - Transmit Suppression Bias
The bias level affects the ease with which near-end
speech may break-in or be crushed by far-end
speech. See the Design Considerations section on
Transmit Suppression for full details.
TSThd - Transmit Suppression Threshold
This parameter sets the ERLE requirement for dis-
crimination between echo and near-end speech by
the supplementary echo suppressor. See the De-
sign Considerations section on Transmit Suppres-
sion for full details.
HHold - Hold in Half-Duplex on Howl
This is a control flag which, if enabled, holds the
system in the half-duplex operation if it were to
howl for any reason and the howl detectors trip and
clear coefficients. The system may transition to
full-duplex if the flag is subsequently cleared.
Reset
A hardware reset, achieved by bringing RST low
for at least 1 µs and then high again, must be ap-
plied after initial power-on.
When RST is held low, the various internal blocks
of the CS6420 are powered down. When RST is
brought high, the oscillator is enabled and approx-
imately 4 ms later, all digital clocks begin operat-
ing. The ADCs and DACs are calibrated and all
internal digital initializations occur. The MCR is
sampled after the reset timer expires (104 ms after
the rise of RST or sooner if using the early exit de-
scribed below) to determine whether the reset was
warm or cold. After the MCR is initially sampled,
the default (reset) values of the MCR are restored
to it.
Cold reset is a total reset of all the components of
the CS6420. The ADCs and DACs are reset, the
echo canceller memories and registers are all
cleared, and the default settings of the MCR are re-
stored. Cold reset is the default reset mode upon
power up or in the absence of a microcontroller.
Warm reset is like cold reset except that the echo
canceller coefficients and certain key variables are
not cleared, but instead keep their pre-reset value.
This gives the CS6420 a headstart in adapting to its
environment if the echo environment is relatively
stable, assuming a cold reset happened at least once
since power up.
The CS6420 is warm reset by raising the RST pin
high, waiting 4 ms for the digital clocks to start, and
then writing 0111111111111110 (0x7FFE) to the
MCR within 104 ms after RST goes high. If no
control word is sent, the CS6420 will cold reset. If
the control word is sent after the timer has expired,
it is interpreted as a normal control word.
Another special reset option is to exit the 100 ms
reset timer before the 100 ms has elapsed. This is
accomplished by writing a control word to the
MCR with Bit 15 set high. To exit the timer early
in cold reset, write 1000000000000 (0x8000). The
timer may be bypassed and warm reset asserted by
sending 1111111111111110 (0xFFFE). The
100 ms timer prevents operation until the bias volt-
ages generated on-chip settle, but the startup delay
might be objectionable in some applications.
Clocking
The clock for the converters and DSP is provided
via the clocking pins, CLKI (pin 14) and CLKO
(pin 13). A 20.480 MHz parallel resonant crystal
CS6420
20
DS205PP2
placed between these two pins and loaded with
22 pF capacitors will allow the on-chip oscillator to
provide this system clock. Alternatively, the CLKI
pin may be driven by a CMOS level clock signal.
The clock may vary from 20.480 MHz by up to
10%, however, this will change the sampling rate
of the converters and echo canceller, which will af-
fect the bandwidth of the analog signals and the du-
ration of echo that the echo canceller can
accommodate. CLKO is not connected when CLKI
is driven by the CMOS signal.
Power Supply
The pins AVDD (pin 1) and AGND (pin 2) power
the analog sections of the CS6420, and DVDD (pin
16) and DGND (pin 15) power the digital sections.
This distinction is important because internal to the
part, the digital power supply is likely to contain
high-frequency energy. The analog power supply is
kept clean internally by drawing current from a dif-
ferent pin, thereby achieving high performance in
the converters.
The digital supply of the CS6420 should not be
connected to the system digital supply, if there is
one, as the CS6420 has internal timing mechanisms
designed to minimize the detrimental effects of its
own digital noise, but cannot use these to compen-
sate for externally introduced digital noise. The
CS6420 digital power supply should be derived
from its analog power supply through a ferrite bead
with low (< 1
) DC impedance.
Power Down Mode
Typical power consumption of the CS6420 is 60
mA, assuming normal operating conditions. This
current consumption can be further reduced by in-
voking the powerdown mode, which is entered by
holding RST low. Holding RST low will power
down all the internal blocks of the CS6420 and stop
the oscillator. In powerdown mode, current con-
sumption drops to less than 1 mA.
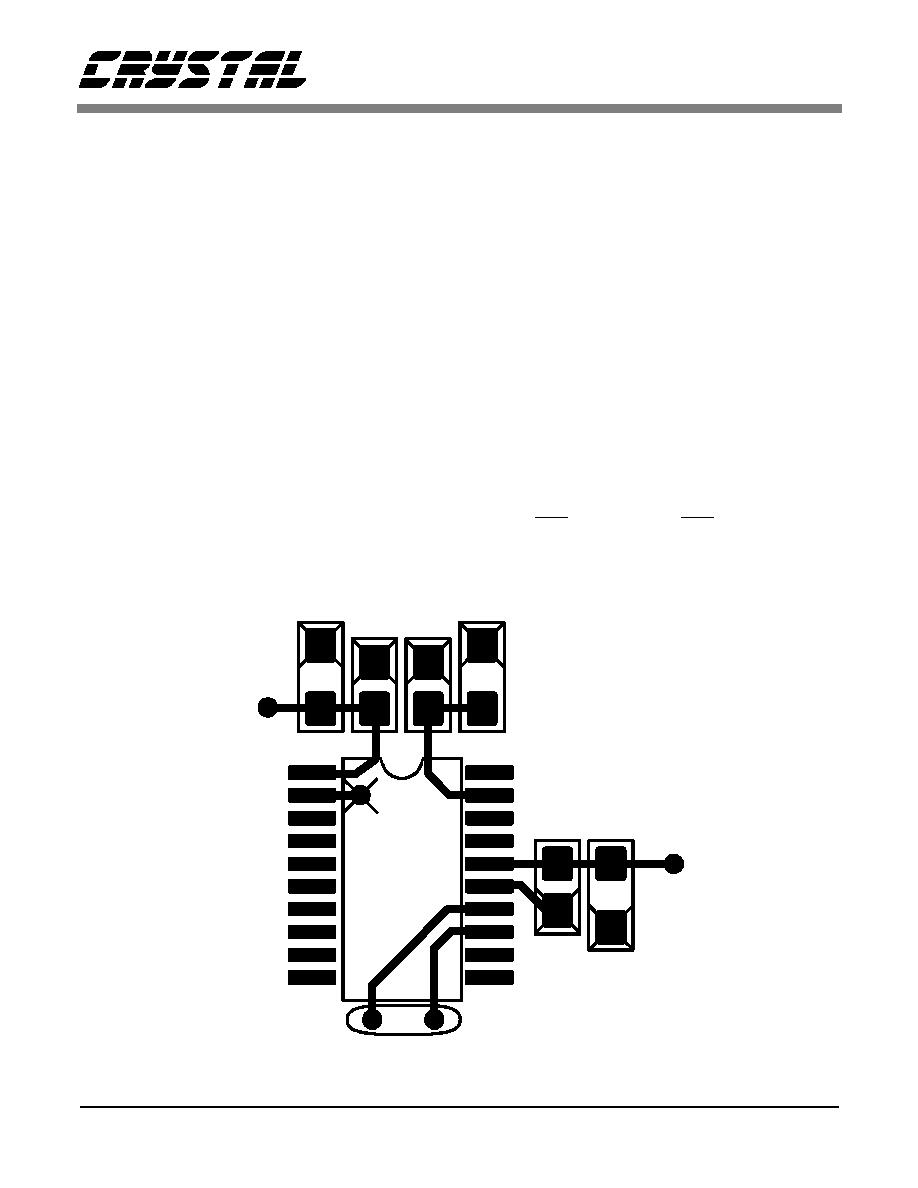
AGND
DVDD
MB
AVDD
+5V
Analog
Supply
DGND
From
Ferrite
Bead
Figure 6. Suggested Layout

CS6420
DS205PP2
21
Noise and Grounding
Since the CS6420 is a mixed-signal integrated cir-
cuit, the system designer must pay special attention
to layout and decoupling to minimize noise con-
cerns. The three best methods to reduce noise when
using the CS6420 are to have good decoupling of
power supplies, separation of analog and digital
power and ground, and careful board layout.
Figure 6 shows the suggested placement of decou-
pling capacitors for the power supplies. Note that
the trace length from the power pin to the capaci-
tors is minimized. Also note that the smaller valued
capacitor is placed closer to the pin than the larger
valued capacitor. The smaller capacitor decouples
high frequency noise and the larger capacitor atten-
uates lower frequencies.
The separation of analog and digital power and
ground is done in two ways. The power is separated
by deriving the digital power for the CS6420 from
the analog through a ferrite bead to isolate analog
from digital, as shown in Figure 7. The ferrite bead
serves as a low-pass filter to remove CS6420 digi-
tal switching noise from the analog power supply.
The ground is separated by isolating all the digital
components of the system board on one ground
plane and all the analog and linear components on
a different ground plane. The CS6420 should be
placed over the analog ground plane. This prevents
digital switching noise from the digital components
of the board from coupling into the converters and
aliasing into the passband.
+5V
(Analog)
AVDD
AGND
DVDD
DGND
Analog Ground Plane
Digital Ground Plane
Microcontroller
1
µ
F
0.1
µ
F
0.1
µ
F
1
µ
F
Ferrite Bead
Figure 7. Ground Planes

CS6420
22
DS205PP2
DESIGN CONSIDERATIONS
When designing the CS6420 into a system, it is im-
portant to keep several considerations in mind.
These concerns can be loosely grouped into three
categories: algorithmic considerations, circuit de-
sign considerations, and system design consider-
ations.
Algorithmic Considerations
The CS6420 facilitates full-duplex hands-free
communication via many algorithms running on
the Digital Signal Processor that is the core of the
CS6420. Among these are the algorithms that per-
form the adaptive filtering, the half-duplex switch-
ing, digital volume control, and supplementary
echo suppression.
Full-Duplex Mode
Full-duplex hands-free communication is achieved
through a technique called adaptive filtering. The
basic principle behind adaptive filtering is that the
acoustic path between speaker and microphone can
be modeled by a transfer function which can be dy-
namically determined by an adaptive digital filter.
This principle assumes good update control and
speech/tone detection algorithms to prevent the fil-
ter from mistraining.
Theory of Operation
Figure 8 illustrates how the adaptive filter can can-
cel echo and reduce loop gain. The echo path of the
system is between points B and C: the speaker to
microphone coupling. A signal injected at A
(sometimes called a "training signal") is sent both
to B, the input of the echo path, and to F, the input
of the adaptive filter. The signal at B is modified by
the transducers and the environment, and received
at point C (an "Echo"). Meanwhile, let us assume
for argument's sake that the adaptive filter has ex-
actly the right transfer function to match the echo
path BC, and so the signal at point D is approxi-
mately equal to the signal at point C. After these are
subtracted by the summing element, all that is left
is the error signal at point E, which should be very
small.
If a person were to speak into the microphone at
point C, that signal would pass through the sum-
ming element unchanged because the adaptive fil-
ter had no comparable input to subtract out. In this
manner, the person at A and the person at C may si-
multaneously speak and A will not hear his own
echo.
In the real world, the echo path is not static. It will
change, for example, when people move in the
room, when someone moves the speaker or the mi-
crophone, or when someone drops a piece of paper
on top of the speaker. So, the filter needs to adapt
to modify its transfer function to match that of the
environment. It does so by measuring the error sig-
nal at point E and trying to minimize it. This signal
is fed back to the adaptive filter to measure perfor-
mance and how best to adapt, or train.
The trouble arises when the person at the near-end
(C) speaks: the error signal will be non-zero, but
the adaptive filter should not change. If it tries to
train to the near-end signal, the adaptive filter has
no way to reduce the error signal, because there is
no input to the filter, and therefore no output from
it. The adaptive filter would mistrain.
To prevent this mistraining, the echo canceller uses
double-talk detection algorithms to determine
when to update. These update control algorithms
Adaptive Filter
A
E
D
B
C
+
-
F
Figure 8. Simplified Acoustic Echo Canceller
Block Diagram

CS6420
DS205PP2
23
are the heart of most echo canceller implementa-
tions.
The worst case situation for the CS6420 is when
parties at both ends are speaking and the person at
the near-end is moving. In this case, the echo can-
celler will cease to adapt because of the double-
talk, but the echo will not be optimally reduced be-
cause of the change in path.
Adaptive Filter
The adaptive filter in the CS6420 uses an algorithm
called the "Normalized Least-Mean-Square
(NLMS)" update algorithm to learn the echo path
transfer function. This Finite Impulse Response
(FIR) filter has 508 taps, which can model up to
63.5ms of total path response at a sampling rate of
8kHz. The coverage time is calculated by the fol-
lowing formula:
x
508 = 63.5 ms.
The CS6420's adaptive filter, like all FIR filters,
only models Linear and Time Invariant (LTI) sys-
tems. So, any non-linearity in the echo path can not
be modeled by the adaptive filter and the resulting
signals will not be cancelled. Signal clipping and
poor-quality speakers are very common sources of
non-linearity and distortion.
A common integration problem for echo cancellers
is signal clipping in the echo path. For example, if
a speaker driver is driven to its rails, the distortion
of the speech may be hard to perceive, but it is very
bad for the echo canceller. This technique has been
used in half-duplex phones to provide good low-
level signal gain at the expense of distortion with
high amplitude signals. Since this does not work
for the CS6420, an AGC mechanism has been in-
troduced to provide equivalent behavior without
clipping. See the section on AGC for more details.
Another common problem is speaker quality. A
poor quality speaker which is perfectly acceptable
for a half-duplex speakerphone, may limit the echo
canceller's performance in a full-duplex speaker-
phone. The distortion elements will not be modeled
by the adaptive filter and so limit its effectiveness.
Speakers should have better than 2% THD perfor-
mance to not impede the adaptive filter.
Volume control should be implemented only using
the CS6420 Microcontroller Interface. A real-time
external change in the gain of the speaker driver,
for example, would result in a change in the trans-
fer function of the echo path, and so would force
the adaptive filter to readapt. If the volume control
is done before the input to the adaptive filter, the
echo path does not change, and no retraining is nec-
essary. Another side benefit of the CS6420 volume
control is that it transparently provides dynamic
range compression.
Pre-Emphasis
The typical training signal for the adaptive filter
will be speech, but most adaptive filters work opti-
mally with white noise. Speech has very different
spectral characteristics than white noise because of
its quasi-periodic nature.
Research at Crystal has shown that quasi-periodic
signals cause the formation of spurious non-zero
coefficients within the adaptive filter at tap inter-
vals determined by the periodicity of the signal.
This results in small changes in period being very
destructive to the adaptive filter's performance.
One mechanism the CS6420 uses to prevent this
filter corruption with speech is to pre-emphasize
the signal sent to the adaptive filter so that much of
the low frequency content is removed.
The CS6420 works very well with a speech training
signal because of the pre-emphasis filter. White
noise training signals, however, will result in sub-
optimal performance, so when testing, white noise
is not recommended as a training signal.
Graded Beta
The update gain of an adaptive filter, sometimes
called the "beta", is the rate at which the filter co-
1
8kHz
-------------

CS6420
24
DS205PP2
efficients can change. If beta is too low, the adap-
tive filter will be slow to adapt. Conversely, if it is
too high, the filter will be unstable and will create
unwanted noise in the system.
In most echo canceller implementations, the beta is
a fixed value for all the filter coefficients. In some
situations, though, through knowledge of the char-
acteristics of echo path response, the beta can be
varied for groups of coefficients. This preserves
stability by allowing the beta to be higher for some
coefficients and compensating by reducing beta be-
low nominal for others.
For example, acoustic echo tends to decay expo-
nentially, so the first taps need to be large and the
later taps will be small. Having a large beta for the
first taps will allow those taps to be adapted faster,
while having a small beta for the later taps will
keep the filter stable. This has an added benefit of
suppressing the spurious taps mentioned in the Pre-
Emphasis Filter section above.
The Microcontroller Interface allows four settings
for graded beta: none, 0.19 dB/ms, 0.38 dB/ms, and
0.75 dB/ms. Use 0.75 dB/ms for acoustically dead
rooms or cars, and 0.19 dB/ms or no grading of beta
for large, or acoustically live rooms.
Update Control
As mentioned in the Theory of Operation section,
the update control algorithms are the heart of any
useful echo canceller implementation. Aside from
telling the adaptive filter when to adapt, they are re-
sponsible for correcting performance when the path
changes too quickly for the filter. For example, if
the adaptive filter is actually adding signal power
instead of cancelling, the update control algorithms
will reset the adaptive filter to cleared coefficients,
forcing it to restart.
Speech Detection
The CS6420 detects speech by using power estima-
tors to track deviations from a background noise
power level. The power estimators filter and aver-
age the raw incoming samples from the ADC.
A background noise level is established by a regis-
ter that increases 3 dB at intervals determined by
NseRmp (Register 2, bits 7 and 6). When the power
estimator level rises, the background noise level
will slowly increase to try to match it. When the
power estimator level is below the background
noise level, the background noise level is quickly
reset to match the power estimator level. This
method allows significant flexibility in tracking the
background noise level.
Speech is detected when the power estimator level
rises above the background noise level by a given
threshold. The half-duplex receive speech detector
threshold is set by RHDet (Register 2, bits 11 and
10), the half-duplex transmit speech detector
threshold is set by THDet (Register 3, bits 11 and
10), and the receive suppression speech detector
threshold is set by RSThd (Register 2, bits 5 and 4).
The transmit speech detectors for both half-duplex
and suppression default to 5 dB.
Note that constant power signals which persist for
long durations, such as tones from a signal genera-
tor, will be detected as speech only as long as the
background noise level has not risen to within the
speech detection threshold of the signal power.
When a tone has persisted for long enough, the
background noise level will be equal to the power
estimator level, and so the tone will no longer be
considered speech. This duration is dependent
upon the power difference between the signal and
the ambient noise power, as well as NseRmp. It
should be noted that the CS6420 has a tone detector
to prevent updates when tones are present and allow
tones to persist regardless of the speech detectors.
Half-Duplex Mode
In cases where the system relies on the echo cancel-
ler for stability, a fail-safe mechanism must be in
place for instances when the echo canceller is not

CS6420
DS205PP2
25
performing adequately. The CS6420 implements a
half-duplex mode to guarantee communication
even when the echo canceller is disabled.
When the CS6420 is first powered on, or emerges
from a reset, the echo canceller coefficients are
cleared, and the echo cancellers provide no benefit
at this point. The half-duplex mode is on to prevent
howling and echo from interfering with communi-
cation. Once the CS6420's adaptive filters have
adapted sufficiently, the half-duplex mode is auto-
matically disabled, and full-duplex communication
can occur.
The half-duplex mode allows three states: transmit,
receive, and idle. In the transmit state, the transmit
channel is open and the receive channel is muted.
The receive state mutes the transmit channel. The
idle state is an internal state which is used to en-
hance switching decision making. The CS6420
must be idle before it will allow a state change be-
tween transmit and receive.
The half-duplex controller can be susceptible to
echo, so a holdover timer is provided to help pre-
vent false switching. Holdover will force the chan-
nel to remain in its current state for a fixed duration
after speech has stopped. HDly (Register 2, bits 9
and 8) sets the duration of the holdover. Longer
holdover will tend to make interrupting much hard-
er, but will be much more robust to spurious
switching caused by echo.
AGC
The CS6420 implements a peak-limiting AGC in
both the transmit and receive directions in order to
boost low-level signals without compromising per-
formance when high amplitude signals are present.
The technique effectively results in dynamic range
compression.
The AGC works by setting a reference level based
on the value represented by TVol (Register 1, bits
9-5) for the transmit direction and RVol (Register
0, bits 9-5) for the receive direction. If the signal
from the input is above this reference, it is attenu-
ated to the reference level with an attack time of
125
µ
s. This attenuation level decays with a time
constant of 30 ms unless another signal greater than
the reference level is detected. After the attenua-
tion, a post-scaler scales the reference level to full-
scale (the maximum digital code), which amplifies
all signals by the difference between the reference
level and full-scale.
For example, Figure 9 shows how the AGC works
with a reference level of +30 dB (Word = 00000).
Any signal greater than 30 dB below full-scale (a),
is scaled down to 30 dB (b). This signal is then
scaled up +30 dB (the reference level) to provide
the final output (c). Note that the combination of at-
tenuation and gain results in less than +30 dB total
gain being applied. If the input signal is below 30
dB below full-scale (d), no attenuation is done and
the full +30 dB of gain is applied to the signal (e).
When the reference level is set to +0 dB, the AGC
is effectively disabled. Volume control is imple-
mented by digital attenuation in 3 dB steps from
this point on down. The maximum gain is +30 dB
and the minimum is -60 dB in 3 dB steps. The low-
est gain setting (11111) mutes the path. The signal
scaling takes place in between the two cancellers,
and so does not disturb the echo canceller as chang-
ing gain in the echo path would (see the Adaptive
Filter section for more details).
Suppression
Echo cancellation is somewhat of a misnomer in
that echo is merely attenuated, not entirely can-
celled. Some residual echo still exists after the
summing node. This residual echo, though very
low, may be audible when the near-end talker is not
speaking. Suppression further attenuates the ech-
oed signal.
The CS6420 employs supplementary echo suppres-
sion which adds attenuation on top of the cancella-
tion to remove the residual echo. For example, the

CS6420
26
DS205PP2
transmit channel will engage extra attenuation
whenever only the far-end talker is speaking. How-
ever, if the near-end talker starts speaking, the at-
tenuation is removed and the system relies on the
near-end talker's speech to mask residual echo.
Suppression causes some modulation of the per-
ceived background noise which may be distracting
to some users. As a result, it may be desirable to
limit the suppression attenuation to the minimum
necessary. The CS6420 provides TSAtt (Register
3, bits 9 and 8) to control the amount of attenuation
introduced by suppression in the transmit channel.
Receive suppression attenuates by 24 dB.
The suppression in the transmit suppression and
that in the receive direction work very differently.
The transmit suppression works in a "default off"
mode while the receive suppression is "default on."
Transmit Suppression
The transmit suppressor attenuates the transmit
path when only far-end speech is present, hence the
name "default off." This ensures that the suppres-
sion engages only when necessary.
Recall that the purpose of Transmit Suppression is
to mask residual echo by inserting additional
loss/attenuation in the transmit path in the scenario
when only far-end speech is present; the residual
echo, if any, in double-talk being masked by near-
end speech assuming reasonable levels of ERLE.
There are two controls/tweekable parameters for
governing the behavior of Transmit Suppression.
The two controls are adjustable through the Micro-
controller Interface, and they are TSThd (Register
3, bits 5 and 4) and TSBias (Register 3, bits 7 and
6). TSThd is the primary control and should be ad-
justed before changing the value of TSBias from its
default setting. TSThd sets the ERLE expectation
to be used in discriminating between near-end
speech and far-end echo. This control setting will
by far predominate in affecting the manner in
which Transmit Suppression behaves.
TSBias is a secondary control. This is to be adjust-
ed after the system designer is more or less satisfied
with the behavior of Transmit Suppression with the
TSThd set. It affects the ease with which a near-end
talker may disengage Transmit Suppression and
-30dB
Fs
(a) Input Signal
t
-30dB
Fs
(c) AGC Gain
t
-30dB
Fs
(b) AGC Attenuation
t
-30dB
Fs
(d) Input Signal
t
-30dB
Fs
(e) AGC Gain
t
0dB
0dB
0dB
0dB
0dB
Figure 9. How AGC works (TVol = 00000)

CS6420
DS205PP2
27
keep it disengaged. We recommend using larger
values of TSBias relative to TSThd settings in or-
der to facilitate ease of near-end speech transmis-
sion. For example, the default setting for TSThd is
15 dB and 18 dB for TSBias.
In some scenarios, especially when the dynamic
range of volume control is significantly large, we
also recommend the use of different combinations
of TSThd and TSBias setting relative to output vol-
ume of the acoustic interface.
Receive Suppression
The "default on" receive suppressor is nominally
attenuating unless far-end speech is present. This
behavior is more consistent with behavior observed
in modern speakerphones, and helps keep noise
levels low.
One side effect of this scheme is that a constant
power signal, such as noise from a noise generator
or a tone, will eventually be attenuated when the
background noise level estimate turns off the re-
ceive suppression speech detector. See the section
on Speech Detection from more details.
RSThd (Register 2, bits 5 and 4) sets the speech de-
tection threshold of the suppressor's speech detec-
tor. See the Speech Detection section for more
details.
Circuit Design
The design of the CS6420 interface circuitry plays
an important role in achieving optimum perfor-
mance. The actual circuit design is important, espe-
cially the analog interface. Proper grounding and
layout will help minimize the noise that might get
coupled into the CS6420.
Interface Considerations
Of the CS6420 interfaces, the analog interface and
the microcontroller interface are the most impor-
tant to pay special attention to during circuit de-
sign. The analog interface especially will
determine how well the echo canceller can per-
form.
Analog Interface
The Analog Interface feeds information about the
echo path to the adaptive filter, so it is critical that
this interface be well designed. Using high-quality
transducers and circuits that guarantee low-distor-
tion and minimal clipping are essential to the suc-
cess of any echo canceller based design.
As mentioned in the Adaptive Filter section, the
adaptive filter assumes that the echo path is linear
and time-invariant. As such, poor quality speakers
are a common cause of poor echo canceller perfor-
mance due to their high distortion. Speakers must
be selected with their linearity in mind. In general,
the speaker should have less than 2% Total Har-
monic Distortion. This will result in distortion
terms 34 dB below the desired signal, enough head-
room for the echo canceller to function adequately.
The other major consideration in the design of the
analog interface is that the circuitry that processes
the transducer signals not clip or distort it. For ex-
ample, a common problem is the use of a speaker
amplifier with a fixed gain, which clips when driv-
ing the speaker. Although the distortion may not be
objectionable to the human ear, it will prevent the
adaptive filter from modeling the path correctly.
That which worked for half-duplex speakerphones
will not necessarily work for full-duplex speaker-
phones. Microphone amplifier circuitry is also sus-
pect when looking for sources of clipping and
distortion.
Microcontroller Interface
The Microcontroller Interface is the only asynchro-
nous digital connection to the CS6420, so it is the
most likely place for digital noise coupling to be a
problem. The interface itself is fairly straightfor-
ward and requires only three pins from a microcon-
troller.

CS6420
28
DS205PP2
The three pins that comprise the Microcontroller
Interface are STROBE, DATA, and DRDY.
STROBE must not exceed the system clock of the
CS6420 in speed. Also, four extra clocks are re-
quired after DRDY is brought high in order to latch
the data into the CS6420, as is shown in Figure 5.
Grounding Considerations
Proper grounding of the CS6420 is necessary for
optimal performance from this mixed-signal de-
vice. The CS6420 should be considered an analog
device for grounding purposes.
The digital sections of the CS6420 are synchro-
nized with its ADCs and DACs to minimize the ef-
fects of digital noise coupling. However, for
external digital devices that are asynchronous with
respect to the CS6420, precautions should be taken
to minimize the chances of digital noise coupling
into the CS6420.
A design with the CS6420 should have a separate
ground plane for any digital devices. For example,
a system microcontroller should be on a digital
ground plane with its control lines leading to the
CS6420 in the shortest reasonable distance. The
CS6420 itself should lie completely on the analog
ground plane.
Layout Considerations
The physical layout of the traces and components
around the CS6420 will also strongly affect the per-
formance of the device. Special attention must be
paid to decoupling capacitors, the crystal oscillator,
and the input anti-aliasing filters.
The decoupling capacitors for the power supplies
of the CS6420 should be placed as close as possible
to the power pins for best performance. There are
two capacitors per pin: the 0.1
µ
F capacitor needs
to be closest to the pin to decouple the high fre-
quency components, and the larger cap can be far-
ther away. The MB pin is the most critical as it
connects directly to the on-chip voltage reference.
AVDD and DVDD are secondary to MB with re-
spect to priority.
The crystal oscillator should be placed as close as
possible to reduce the distance that the high fre-
quency signals must travel. If the crystal is placed
too far away, the trace inductance may cause prob-
lems with oscillator startup.
The next concern with placement is the input anti-
aliasing filters for the ADC inputs. NI has an RC
low-pass network with a corner frequency of 8
kHz. The capacitor of this low-pass network should
be placed very close to the pin so that there is very
little exposed trace to pick up noise. If the on-chip
microphone amplifier is used, the 0.022
µ
F capac-
itor on APO will provide the appropriate cutoff fre-
quency, and so should be placed close to the APO
pin. If the on-board preamplifier is not used, APO
will have the same RC network as NI, and should
be treated similarly.
The connections from the controller to the Micro-
controller Interface should be short straight traces,
if possible. The traces should not run very close to
any digital clocks to avoid cross coupling.
System Design
The CS6420 is ultimately only one part of a bigger
full-duplex hands-free system. In order for that sys-
tem to work well, it needs to be properly balanced.
The distribution of the system gains will make or
break the echo canceller. In order to judge perfor-
mance, however, the system integrator must be
armed with the means to test the product.
Gain Structure
The distribution of the system gains is an important
design consideration to keep in mind. Gain distri-
bution is an intricate balancing act where the sys-
tem integrator tries to maximize dynamic range
while minimizing noise, and at the same time, get-
ting excellent echo canceller performance.

CS6420
DS205PP2
29
The basic constraint on getting good echo canceller
performance is that the maximum output should
not clip when coupled to the input. For example, if
in a speakerphone, AO provides 1 V
rms
to a speak-
er, the reflections reaching the microphone should
present no more than 1 V
rms
to the Acoustic ADC.
In fact, it is advisable to allow 6 dB or even 12 dB
of margin, such that in the above example, the sig-
nal present at the Acoustic ADC is 250 mV
rms
.
After this coupling level is established, the desired
signal gain must be established. To continue from
the previous example, the transmit gain must be ad-
justed to make sure the near-end talker is easy to
hear at the far-end. If the signal from the near-end
talker clips at the ADC, it is not significant to the
echo path because the AEC should not be updating
anyway.
In general, to minimize noise, system gain should
be concentrated before the ADC. However, this is
not practical in all cases, mostly because of the cou-
pling constraint. The CS6420 offers the AGC'd
gains provided by TVol and RVol to help provide
the desired gain.
The CS6420 offers two different programmable
gain sources: TGain/RGain and TVol/RVol. TGain
and RGain switch in different size sampling capac-
itors at the ADC to provide a choice of 0 dB, 6 dB,
9.5 dB, and 12 dB of analog gain. TVol and RVol
introduce digital gain and attenuation in 3 dB steps.
The difference is significant in that the digital gain
will gain up the noise of the ADC as well as the de-
sired signal, whereas the analog gain will not.
Testing Issues
The following tests are suggestions for measuring
echo canceller and half-duplex performance.
ERLE
Echo Return-Loss Enhancement (ERLE) is a mea-
sure of the attenuation that an echo canceller pro-
vides. The number is an expression of the ratio of
the level of signal without the echo canceller com-
pared to the level of signal with the echo canceller.
When measuring ERLE, it is important that any po-
tential acoustic loops be broken; so to measure the
ERLE of the Acoustic Canceller, the NO output
should be disconnected from the rest of the net-
work. This will prevent feedback which could oc-
cur when all of the CS6420's failsafes are disabled.
The following example outlines the steps necessary
to measure the ERLE of the acoustic echo cancel-
ler.
It is important to choose a good test signal for the
tests to be valid. As mentioned in the Adaptive Fil-
ter section, the CS6420 does not work optimally
with white noise. The best signal to use would be a
repeatable speech signal, like a recording of some-
one counting or saying "ah."
Use the Microcontroller Interface to disable trans-
mit and receive suppression as well as half-duplex.
Allocate all the taps to the Acoustic Canceller in or-
der to allow full-duplex without the Network Can-
celler being trained. The gains should be set
appropriate for good system performance.
The first measurement is a baseline figure of per-
formance with no echo canceller. Use the Micro-
controller Interface to clear the acoustic canceller
coefficients. Inject the test signal at NI and measure
the rms voltage at NO. This measurement gives the
baseline coupling level (denominator).
Use the Microcontroller Interface to set the acous-
tic canceller coefficients to normal which will al-
low the adaptive filter to adapt. Inject the test signal
at NI and allow a few seconds for the filter to adapt.
Measure the rms voltage at NO. This measurement
gives the cancelled echo level (numerator).
Convert both voltages to decibels and subtract the
echo cancelled level from the baseline level to cal-
culate the ERLE. At the factory, with known good
components, we typically see 30 dB of ERLE with
speech.

CS6420
30
DS205PP2
Convergence Time
Convergence time is a measure of how quickly the
adaptive filter can model the echo path. From
cleared coefficients, the training signal is injected
into the echo canceller and the time for the ERLE
to reach a given threshold value is the convergence
time. Different customers will have different
threshold levels, so Crystal does not specify con-
vergence time.
The following example will measure convergence
time for the acoustic echo canceller:
Set up the system as for the ERLE test. Clear the
acoustic canceller coefficients through the Micro-
controller Interface. Apply the training signal to
NI, set the coefficients to normal, and simulta-
neously start a timer. Once the measured ERLE
reaches the threshold the system designer desires,
stop the timer. The elapsed time is the convergence
time. A good value for the threshold would be the
AErle value from Register 3, since this would be
the time for the CS6420 to go from half-duplex
mode to full-duplex mode.
A good tool for this measurement is a digital stor-
age oscilloscope set to a slow sweep so that about
five seconds of signal is shown on the screen. One
channel of the oscilloscope should monitor the
ADC input (for an uncancelled reference), and an-
other channel should monitor the echo cancelled
output. This technique is especially effective when
speech is the training signal.
We see about 2-5 seconds of training time using
known good equipment. This time assumes contin-
uous speech as the training signal. Pauses will ex-
tend the convergence time.
Half-Duplex Switching
Although the CS6420 transitions from half-duplex
operation from reset after only a few utterances are
passed through the system, the performance of the
half-duplex is critical to the end-user in cases
where the echo canceller is not adequate. The half-
duplex switching characteristics can be subjective-
ly tested with the following procedure:
Set the CS6420 Microcontroller Interface to the
nominal register values for the system, but clear the
acoustic and network echo canceller coefficients.
This will force the CS6420 to remain in half-duplex
mode.
The most useful test of practical performance
found at Crystal has been the "alternating counting
test." In this test the person at the near-end counts
all the odd numbers and the person at the far-end
counts all the even numbers. This tests the inter-
ruptibility of the half-duplexer. During testing, sys-
tem parameters for the half-duplex may need to be
changed to accommodate the level of performance
expected for the product. See the Half-Duplex and
Register Definitions sections for more details.

CS6420
DS205PP2
31
PIN DESCRIPTIONS
Analog Interface
AO - Acoustic Interface Output, Pin 3
Analog voltage output for the acoustic side (near-end output/receive output). Maximum output
signal is 1 V
rms
(2.8 V
pp
). This output can drive down to 10 k
and is usually followed by a
speaker driver. The output is pre-compensated to expect a single-pole RC low pass filter with a
corner frequency of 4 kHz.
NO - Network Interface Output, Pin 4
Analog voltage output for the network side (far-end output/transmit output). Maximum output
signal is 1 V
rms
(2.8 V
pp
). This output can drive down to 10 k
. The output is pre-
compensated to expect a single-pole RC low pass filter with a corner frequency of 4 kHz.
API - Acoustic Interface Preamplifier Input, Pin 20
Input to the acoustic side microphone preamplifier. Signal source resistance at this pin will
reduce the 34 dB gain inherent in the preamplifier. The maximum signal without clipping is
20 mV
rms
(57 mV
pp
), assuming default settings.
APO - Acoustic Interface Preamplifier Output, Pin 18
Output of the acoustic side microphone preamplifier and input to the acoustic side analog-to-
digital converter (near-end input/transmit input). This input expects a single-pole RC anti-
aliasing filter with a corner frequency of 8 kHz. Maximum signal level before clipping at this
point is 1 V
rms
(2.8 V
pp
), assuming default settings for the Tx Analog Gain.
MB - Microphone Bias Voltage Output, Pin 19
Output of 3.5 VDC provides the internal voltage reference for the CS6420. MB must be
decoupled with a 10
µ
F and 0.1
µ
F capacitor to prevent noise from affecting the on-chip
voltage reference. MB must not be connected to any load.
1
2
3
4
5
6
7
8
12
13
14
15
16
AVDD
AGND
AO
NO
RST
DRDY
STROBE
DATA
DVDD
DGND
CLKI
CLKO
NC4
9
10
NC1
NC2
17
18
APO
NI
19
20
API
MB
11
NC3
CS6420

CS6420
32
DS205PP2
NI - Network Interface Input, Pin 17
Input to the network side analog-to-digital converter (far-end input/receive input). This input
expects a single-pole RC anti-aliasing filter with a corner frequency of 8 kHz. Maximum signal
level before clipping at this point is 1 V
rms
(2.8 V
pp
), assuming default settings for the Rx
Analog Gain.
Microcontroller Interface
RST - Active Low Reset Input, Pin 5
When RST is held low, the CS6420 is put into a low power mode with all functional blocks
idle. When RST goes high, the CS6420 is started in a known state.
DRDY - Active Low Microcontroller Interface Data Ready Input, Pin 6
DRDY is a low pulse used to gate valid input data into the Microcontroller Interface.
STROBE - Microcontroller Interface Clock Input, Pin 7
The rising edge of STROBE latches DATA into the Microcontroller Interface while DRDY is
low.
DATA - Microcontroller Interface Data Input, Pin 8
DATA is latched into the Microcontroller Interface on the rising edge of STROBE.
Clock
CLKI - Clock Oscillator Input, Pin 14
A 20.480 MHz parallel-resonant crystal should be connected between CLKI and CLKO.
Alternatively, CLKI may be driven directly with an 20.480 MHz CMOS level clock.
CLKO - Clock Oscillator Output, Pin 13
A 20.480 MHz parallel-resonant crystal should be connected between CLKI and CLKO. Must
be floating if CLKI is driven directly with a CMOS level clock.
Power Supply
AVDD - Analog Supply, Pin 1
+5 Volt analog power supply.
AGND - Analog Ground, Pin 2
Analog ground reference.
DVDD - Digital Supply, Pin 16
+5 Volt digital power supply.
DGND - Digital Ground, Pin 15
Digital ground reference.

CS6420
DS205PP2
33
Miscellaneous
NC1 - No Connect, Pin 9
Must be floating for normal operation.
NC2 - No Connect, Pin 10
Must be floating for normal operation.
NC3 - No Connect, Pin 11
Must be floating for normal operation.
NC4 - No Connect, Pin 12
Must be floating for normal operation.

CS6420
34
DS205PP2
GLOSSARY
Echo
A signal that returns to its source after some delay.
Network Echo
Echo resulting from signal reflection due to an impedance mismatch in a 2-to-4 wire converter
(hybrid).
Acoustic Echo
Echo created by signal propagation in a room from a speaker to a microphone.
Reverberation
Local information that bounces around the room before it reaches the microphone. An example
of reverberation is when your back is to the speakerphone, and your voice bounces off the wall
before it reaches the microphone.
Near-End
The location with the acoustic interface (speaker and microphone).
Far-End
The location connected to the network interface.
Transmit Path
The signal path from Near-End input to Far-End output.
Receive Path
The signal path from Far-End input to Near-End output.
Full-Duplex
The state when both Transmit and Receive paths are simultaneously active.
Half-Duplex
The state when either Transmit or Receive path is active.
Supplementary Echo Suppression
Dynamic attenuation placed in the opposite path of the active path to mask residual echo. For
example, if the receive path is active, the transmit path is attenuated. When both paths are
simultaneously active, the suppression attenuation is removed. See the section on Suppression
in Design Considerations for more details.

CS6420
DS205PP2
35
Howling
In full-duplex operation, both the microphone and speaker are active at the same time, which,
in conjunction with the reflection off the hybrid, creates a closed loop. The signal coupling
between the speaker and the microphone can cause feedback oscillation or howling. This
happens when the coupling between the speaker and microphone is strong enough to increase
the system's closed loop gain above unity.
Acoustic Coupling
The strength of the output signal from the speaker that is received at the microphone input.
Adaptive Filter
A digital FIR filter that adjusts its coefficients to match a transfer function, such as the echo
path between the speaker and microphone. The adaptive filter is able to compensate for
different and changing conditions, such as someone moving in the room.
Echo Path
The acoustic echo path describes the acoustic coupling between the speaker and the
microphone. It describes both the magnitude and delay characteristics of the echoed signal. It is
affected by the speaker, microphone, phone housing, room, objects in the room, movement, and
the talker. The network echo path is comprised of the transfer function between NO and NI.
Path Change
A change in the transfer function that describes the Echo Path. Changes in the acoustic echo
path are most commonly due to motion in the room or gain changes at an external speaker.
Network echo path is most easily changed by picking up an extension or hanging up the phone.
AGC
The CS6420 implements a peak-limiting Automatic Gain Control to allow a greater dynamic
range without clipping the signal. See the section on AGC in the Design Considerations
section for details on how it works.
Doubletalk
The condition occurring when both Near End and Far End talkers are speaking simultaneously.
ERLE
Echo Return-Loss Enhancement is the amount of attenuation of echo signal an echo canceller
provides (not counting Suppression) as measured in dB. ERLE is a measure of the echo
canceller's performance. The larger the value for ERLE, the better the echo cancellation.

CS6420
36
DS205PP2
Coverage Time
The CS6420 echo canceller has 508 taps and it can sample an analog signal at an 8 kHz rate.
512 x 1/8kHz = 63.5 ms. Sound travels through air at a rate of around 1 ft/ms. Thus the echo
canceller can be used in a room with walls 32 feet away, discounting multiple reflections. But
remember that at this distance, most of the echo has been attenuated due to the physical
separation. The majority of the acoustic coupling comes from the first arrival, or directly from
the speaker to the microphone. The first signal is by far the strongest.
Convergence Time
A high quality echo canceller is continuously modifying its internal model of the echo path
characteristics (See Adaptive Filter). When the model is complete, the echo canceller will be
able to cancel echo to the extent of its rated capabilities. Convergence time is the duration it
takes the echo canceller to train itself, from cleared coefficients, and switch to full-duplex
operation, in the presence of speech.

CS6420
DS205PP2
37
PACKAGE DIMENSIONS
20-Pin
SOIC
MILLIMETERS
INCHES
MIN
MAX
MAX
MIN
0.095
0.105
2.41
2.67
0.008
0.015
0.203
0.381
0.398
0.420
10.11
10.67
0.020
0.013
0.51
0.33
0.016
0.035
0.41
0.89
8∞
0∞
0∞
8∞
0.510
0.490
12.45
12.95
0.012
0.005
0.127
0.300
1.14
0.040
DIM
E
E
b
L
D
e
A
A
c
0.292
0.298
7.42
7.57
D
E
E1
e
A
A
b
1
A 2
c
L
1
1
1.40
0.055
A 2
NOM
2.54
0.280
10.41
0.46
-
-
12.70
-
7.49
1.27
2.29
2.54
2.41
NOM
0.100
0.011
0.410
0.018
-
-
0.500
-
0.295
0.050
0.100
0.090 0.095

∑ Notes ∑

39
Copyright
©
Cirrus Logic, Inc. 1998
(All Rights Reserved)
Cirrus Logic, Inc.
Crystal Semiconductor Products Division
P.O. Box 17847, Austin, Texas 78760
(512) 445 7222 FAX: (512) 445 7581
http://www.crystal.com
CDB6420
CS6420 Evaluation Board
Features
l
Small size of important board components
eases system integration
l
Speaker driver included
l
Microphone bias circuitry provided
l
Easy connection to PC Parallel Port
l
Windows-based control software included
l
Analog and Digital Patch Area
l
Includes Evaluation Board, 3 1/2" Software
Diskette, and 25-Pin D Connection Cable.
Description
The CDB6420 allows an end-user to quickly and easily
integrate the CS6420 Full-Duplex Speakerphone IC into
a system and evaluate its performance. The board
comes with software which allows the registers of the
CS6420 to be manipulated from a personal computer
running Windows. Evaluation requires a +5 V power
supply. Connections for analog audio sources are pro-
vided on the board.
The CDB6420 includes a business card-sized section
which contains the CS6420 and all the elements neces-
sary to provide a speakerphone interface. This section
is available for direct insertion into a target system, if the
target system can provide the signals required by the
CS6420 Network Interface.
ORDERING INFORMATION
CDB6420
Evaluation Board
Digital
Patch Area
Analog
Patch Area
Parallel
Port
Connector
4
B
U
F
F
E
R
CS6420
AGND +5VA
NO
AO
SPEAKER
APO_IN
NI
API
APO
NI
NO
AO
BIAS
4
MICIN
JUN `97
DS205DB1
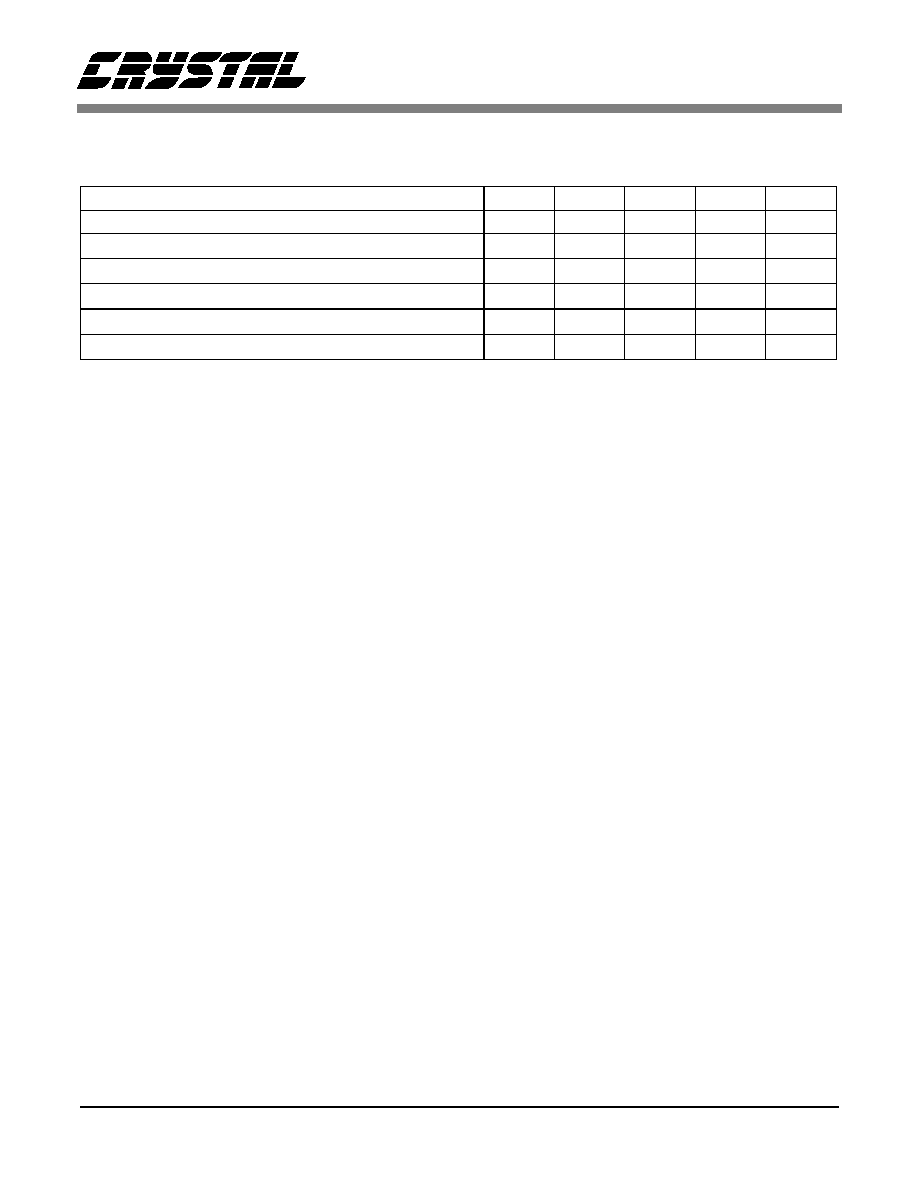
CDB6420
40
DS205DB1
1. Assumes TGain=RGain= 0 dB.
RECOMMENDED OPERATING CONDITIONS
Parameter
Symbol
Min
Typ
Max
Units
DC Supply (AVDD, DVDD)
+5VA
4.5
5.0
5.5
V
Ambient Operating Temperature
T
AOp
0
25
70
∞C
Maximum Analog Input Level (APO, NI)
Note 1
V
in
2.8
V
pp
Maximum Analog Output Level (AO, NO)
V
out
2.8
V
pp
Input and Output Offset Voltage
V
off
2.12
VDC
Maximum Speaker Output Voltage
V
spkr
6.4
V
pp

CDB6420
DS205DB1
41
HARDWARE
Power Supplies
The CDB6420 power supply circuitry is shown in
Figure 1. The evaluation board expects a clean
+5V DC power supply to be applied to the +5VA
binding post. This powers the analog components
of the evaluation board. Power for the digital com-
ponents is derived through a ferrite bead to filter
out the high frequency components.
Analog Signal Connections
Figure 2 shows the RCA connectors for the analog
signals. These RCA connectors connect directly to
the test points with the same names. All the con-
nectors have a nominal maximum input and output
voltage of 2.8 V
pp
. NO and AO present 12 k
of
output impedance at the connector and have a low-
pass corner at 4 kHz. APO_IN and NI both have
input anti-aliasing filters with corners at 8 kHz, and
an nominal input impedance of 6 k
.
Microphone Bias
A constant current source providing the necessary
bias for electret microphones is shown in Figure 3.
A 1/8" stereo microphone jack (J8) is provided for
easy connection to microphones with 1/8" plugs.
HDR3 provides an easy way to connect a micro-
phone with bare wires. The stereo microphone jack
is self-shorting, so when connecting to the test
point MICIN or HDR4, make sure that either a plug
is in the jack, or the trace from the jack has been cut
(HDR4 is a convenient place to do this).
Speaker Driver
A speaker driver circuit, implemented with a Mo-
torola MC34119, is shown in Figure 4. This circuit
provides 6.4 V
pp
differentially to the SPEAKER
terminals (J1 and J2). This circuit can drive down
to an 8
load. When using the speaker driver, the
speaker driver must be connected to AO by HDR3.
This will connect the speaker driver to AO, but in
doing so will create a voltage divider at the AO test
point resulting in a 1.4 V
pp
full-scale swing at the
AO test point and connector. The CDB6420 is
shipped with the speaker driver enabled by default.
In order to disable the speaker driver, remove the
jumper shorting HDR3. This will result in the con-
nection between AO and the speaker driver input
being broken and allowing the signal at the AO test
point and connector to swing to its full extreme of
2.8 V
pp
full-scale.
CS6420
The heart of the CDB6420, the CS6420 Full-Du-
plex Speakerphone Chip, is shown in Figure 5. The
outputs AO and NO are shown with the output low-
pass filters that remove the high frequency compo-
nents from the delta-sigma DACs. The inputs
APO_IN and NI are shown with the anti-aliasing
network they require.
When using APO as the input, the CS6420 does not
use the on-chip 34 dB preamplifier. HDR1 must be
changed to the PREAMP OFF (1-2) position when
Figure 1. Power Supply
Figure 2. RCA Connections

CDB6420
42
DS205DB1
Figure 3. Microphone Input Circuit
Figure 4. Speaker Output Circuit

CDB6420
DS205DB1
43
using APO_IN as an input. This connects the sig-
nal path appropriately. The control bit in the soft-
ware (Mic) must be set to APO as well. When
using MICIN as the acoustic side input source,
HDR1 must be in the PREAMP ON (3-4) position,
and the Mic bit in the software should be set to API.
The test loops labeled API and APO are provided to
allow easy probing of the pins of the same name. The
maximum signal present at APO should be 2.8 V
pp
with TGain (see the Software section) set to 0 dB.
Parallel Port Interface
Figure 6 shows the parallel port interface of the
CDB6420 that connects to a PC's parallel port. The
74HCT541 buffer serves to protect the CS6420
from any damaging surges. The buffer is socketed
for easy replacement. Four of the parallel port data
lines are used to control the microcontroller interface
pins of the CS6420. The RC network serves to min-
imize the ringing common to HCT devices. Test
loops are provided for easy oscilloscope access.
Figure 5. CS6420 Connection Diagram
Figure 7. Grounds

CDB6420
44
DS205DB1
SOFTWARE
Requirements
Windows 3.1 or better
available LPT port
100KB Hard Disk space
Selecting an LPT Address
When starting the program for the first time, an
LPT address must be specified to communicate
with the CDB6420. This address is usually avail-
able from the BIOS information displayed at sys-
tem boot or from the PC's CMOS setup program.
This address is necessary for the CDB6420 pro-
gram to manipulate the registers on the board.
Select the LPT address by choosing the appropriate
address in the "Control | LPT Address..." menu-
item. A good way to tell if you have selected the
correct address is to change the Reset Option to
Powerdown (see the Reset Options section), and
press the Current Reset Option button. If you have
an ammeter on the power supply to the CDB6420,
you will see a dramatic decrease in current con-
sumption. Alternatively, you can probe the RST
line and you should see it go low when you press
the button.
Reset Options
A dialog box which supports the various CS6420
reset options is shown in Figure 8. This dialog box
is invoked by selecting the menuitem "Control | Re-
set Options...".
The "Exit Timer" edit box allows the system inte-
grator to test the effects of an early exit from reset.
An integer from 0 to 100 may be entered here to
specify how long after RST goes high the control
word to terminate the reset timer early will be sent.
See the CS6420 datasheet for more details.
The CS6420 is capable of either a cold reset or a
warm reset. A cold reset resets all registers and
Figure 6. Parallel Port

CDB6420
DS205DB1
45
variables to their default values. A warm reset
saves certain key variables to allow the CS6420 to
adapt to the echo path more quickly.
The function of the reset button in the main win-
dow are controlled by the radio buttons in the group
"When Reset Button is pushed:". The first option
will force the CS6420 into a low power mode by
holding RST low until the button is pushed again
(the text on the button will change to reflect this).
The second option will send the current settings of
the four registers to the CS6420 immediately after
performing the reset. The last option will restore
the default values of the registers to the CS6420,
which is the mode selected when the program is
initially started. Note that this option also changes
the register settings in the main window. Also note
that once this type of reset is invoked, the reset type
will automatically be changed to restore current
register values.
Main Window
Figure 9 shows the main window of the CDB6420
Control Program. The main window is a block di-
agram representation of the internals of the CS6420
with all the registers placed in their appropriate lo-
cations in the signal flow. The right side of the
screen is the Near End (or Acoustic Interface), and
the left side is the Far End (or Network Interface.
See figure 9). The upper path is the Receive Path,
and the lower path is the Transmit Path. The hexa-
decimal values of the registers given the current
settings of the controls is given in the lower left
corner. These values are sent to the CS6420 over
the microcontroller interface.
The Controls
There are 27 controls in the CDB6420 Control Pro-
gram main window. These controls map to the four
registers in the CS6420 whose register values can
be seen in hexadecimal format in the lower left of
the main window. The controls can be easily nav-
igated by using the "Tab" key to traverse the con-
trols from left to right, and "Shift-Tab" to reverse
the direction. Furthermore, the four most common-
ly used controls have hotkeys which will take you
to them: RVol (Ctrl+1), TVol (Ctrl+2), NCC
(Ctrl+3), and ACC (Ctrl+4). These are also acces-
sible from the "Control" menu.
Drop-down Box Hints
Once familiar with the values in the drop-down
boxes, one can easily choose specific values by
typing the first letter of the selection, or using the
up and down arrow keys. Typing the first letter of
the selection can help avoid lots of scrolling and
unnecessary writes to the microcontroller interface.
For example, if RVol is currently selected, its value
can be changed to 30 dB by pressing 3 once and to
3 dB by pressing it again. 0 dB is selected by press-
ing 0, and pressing "m" will select mute. Alterna-
tively, if the value is 0 dB, pressing the down arrow
will set the register to -3 dB, and pressing the up ar-
row will set the value to 3 dB.
As another example, when manipulating the
Acoustic Coefficient Controls (ACC) drop-down
box, the desired setting of the three available selec-
tions ("Normal", "Clear", and "Freeze") can be
chosen with the keys "n", "c", and "f". If using the
arrow keys, going to Freeze from Normal would al-
ways result in a Clear, which may not be desired, so
pressing "f" would be preferable. You can always
use the mouse to select the value.
Figure 8. Reset Options

CDB6420
46
DS205DB1
Button Hints
The four checkboxes (RSD, HHold, HD, and TSD)
can be toggled by pressing the spacebar when the
checkbox is selected. The radio button for Mic
(choosing between API and APO for the ADC in-
put source) is changed by using the up or down ar-
row. The Reset Button (at the bottom of the main
window) can be pressed when selected by pressing
the spacebar, or at anytime by pressing the enter
key. As above, you can always use the mouse to se-
lect the value.
Controls in Detail
The controls are discussed in detail below. Each
description has the register name, the available
choices, and the consequence of each choice sum-
marized. The following descriptions are only
meant as a supplement to the CS6420 datasheet.
Please carefully read the Register section of that
document for full details.
RGain - Receive ADC Analog Gain
0 dB, 6 dB, 9.5 dB, 12 dB:
set gain of the ADC at NI
RSD - Receive Suppression Disable
checked:
disable receive suppression
unchecked:
enable receive suppression
Figure 9. Main Control Panel

CDB6420
DS205DB1
47
RSThd - Receive Suppression speech-detection
Threshold
5 dB:
default
3 dB:
make disengaging receive suppression easier
(sensitive to bursty far end noise)
6 dB:
make receive suppression harder to disengage
(less sensitive to far end noise).
NCC - Network (echo canceller) Coefficient
Control
Normal:
coefficients adapt to echo path
Clear:
coefficients held to zero (no cancellation)
Freeze:
coefficients held to current values and adapta-
tion halted
NErle - Network ERLE threshold
24 dB:
default
18 dB:
network echo canceller tends to go to full-du-
plex more easily (faster)
30 dB:
network echo canceller requires good perfor-
mance to go to full-duplex (slower)
NFNse - Network Full-duplex Noise threshold
zero:
use NErle as sole criterion to transition to full-
duplex.
-42 dB:
echo path may not exist, so go to full-duplex
when noise level is below -42 dB (easy) and in-
ternal determination of path/no path is complete
-54 dB:
echo path may not exist, so go to full-duplex
when noise level is below -54 dB (hard) and in-
ternal determination of path/no path is complete
TVol - Transmit Volume
30 dB, 27 dB, ... , -57 dB, -60 dB, mute:
digital volume control, positive numbers are
AGC'd.
RHDet - Receive Half-duplex Detect threshold
5 dB:
default
3 dB:
half-duplex detects far end speech more easily
(more sensitive to far end noise)
6 dB:
half-duplex less sensitive to far end speech (less
sensitive to far end noise)
HHold - Half-duplex Hold on howl
checked:
after howl, CS6420 remains in half-duplex
unchecked:
after howl, CS6420 readapts
HDly - Half-duplex holdover Delay
200 ms:
default
100 ms:
very easy to break in, but may falsely switch
150 ms:
somewhat easy to break in, but may falsely
switch
HD - Half-duplex Disable
checked:
CS6420 will never be in half-duplex.
unchecked:
CS6420 can be in half-duplex as needed.
NseRmp - Noise estimator Ramp rate
1 sec:
noise estimator increases noise level by
3 dB/ 1 sec
0.5 sec:
estimated noise level increases by 3 dB/ 0.5 sec
(improves tracking of dynamic noise levels)
2 sec:
estimated noise level increases by 3 dB/ 2 sec
(improves detection of long bursts of speech)
THDet - Transmit Half-duplex Detect
threshold
5 dB:
default
3 dB:
half-duplex tends to detect transmit speech
more easily (more sensitive to near end noise)
6 dB:
half-duplex is less sensitive to transmit speech
(less sensitive to near end noise)
RVol - Receive Volume
30 dB, 27 dB, ... , -57 dB, -60 dB, mute:
digital volume control where positive numbers
are AGC'd
ACC - Acoustic (echo canceller) Coefficient
Control
Normal:
coefficients adapt to echo path
Clear:
coefficients held to zero (no cancellation)
Freeze:
coefficients held to current values and adapta-
tion halted
AErle - Acoustic ERLE threshold
24 dB:
default
18 dB:
acoustic echo canceller tends to go to full-du-
plex more easily (faster)
30 dB:
acoustic echo canceller requires good perfor-
mance to go to full-duplex (slower)

CDB6420
48
DS205DB1
AFNse - Acoustic Full-duplex Noise threshold
zero:
use AErle as sole criterion to transition to full-
duplex.
-42 dB:
echo path may not exist, so go to full-duplex
when noise level is below -42 dB (easy) and in-
ternal determination of path/no path is complete
-54 dB:
echo path may not exist, so go to full-duplex
when noise level is below -54 dB (hard) and in-
ternal determination of path/no path is complete
PCSen - Path-Change Sensitivity
high:
more sensitive to near end path changes (on rare
occasions may briefly drop into half-duplex
during doubletalk)
low:
less sensitive to path changes and more robust
to doubletalk
GB - Graded Beta
0.00 dB/ms: use to disable beta grading
0.75 dB/ms: use for acoustically dead rooms (e.g. inside a
car)
0.38 dB/ms: use for "typical" rooms
0.19 dB/ms: use for very acoustically live rooms (e.g. glass
or tile walls, no carpet, etc.)
Taps - allocation of filter Taps
55.5ms/---:
allocate all taps to Acoustic canceller (disables
Network canceller)
47.5ms/16ms:use for short Network path echo durations or
for longer Acoustic path
38.5ms/24ms:use for typical Network path echo durations
31.5ms/32ms:use for long Network path echo durations (note
that Acoustic performance may suffer)
TSD - Transmit Suppression Disable
checked:
disable transmit suppression
unchecked
enable transmit suppression
TSThd - Transmit Suppression Threshold
15 dB:
need 15 dB ERLE at acoustic canceller to dis-
criminate between speech and echo
12 dB:
less sensitive to near end speech (more prone to
suppressing near-end speech)
9 dB:
least sensitive to near end speech (most prone to
suppressing near-end speech)
TSAtt - Transmit Suppression Attenuation level
18 dB:
default
12 dB:
use if noise modulation caused by suppression
is annoying and residual echo is not perceptible
24 dB:
use if residual echo after suppression is percep-
tible
TSBias - Transmit Suppression Bias
18 dB:
default
15 dB:
harder for near end to break in. See CS6420
datasheet for details
21 dB:
easier for near end to break in. See CS6420
datasheet for details
TGain - Transmit ADC analog Gain
0 dB, 6 dB, 9.5 dB, 12 dB:
set gain of the ADC at API/APO
Mic - Microphone preamplifier select
API:
ADC input is taken from API/MICIN through
34 dB amplifier (HDR1 on board must be set to
PREAMP ON)
APO:
ADC input is taken from APO/APO_IN (HDR1
on board must be set to PREAMP OFF)
Reset Button
Cold Reset, Default:
cold reset to default register values
Warm Reset, Default:
warm reset to default register values
Cold Reset, Current:
cold reset to register values indicated by con-
trols
Warm Reset, Current:
warm reset to register values indicated by con-
trols
Power Down:
hold CS6420 RST low to force low power
mode
Power Up, Cold Reset, Current:
bring CS6420 RST high; restore register values
indicated by controls
Power Up, Warm Reset, Current:
bring CS6420 RST high; warm reset and re-
store register values indicated by controls

CDB6420
DS205DB1
49

CDB6420
50
DS205DB1

CDB6420
DS205DB1
51
