 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: MIC2186 | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |

July 2002
1
MIC2186
MIC2186
Micrel
MIC2186
Low Voltage PWM Control IC
Final Information
General Description
Micrel's MIC2186 is a high efficiency boost PWM control IC.
With its wide input voltage range of 2.9V to 14V, the MIC2186
can be used to efficiently boost voltages in 1- or 2-cell Li Ion
battery powered applications, as well as to boost voltages in
fixed 3.3V, 5V, or 12V systems. Its powerful 1.6
output
driver allows the MIC2186 to supply large output currents with
the selection of proper external MOSFETs.
The MIC2186 can be configured to operate at 100kHz,
200kHz, or 400kHz. With it's fixed frequency PWM architec-
ture, and easily synchronized drive, the MIC2186 is ideal for
noise-sensitive telecommunications applications.
MIC2186 also features a low current shutdown mode of
0.5
µ
A and programmable undervoltage lockout. A manually
selectable SKIP Mode allows high efficiencies in light load
situations.
The MIC2186 is available in 16 pin SOIC and QSOP package
options with an operating range from ≠40
∞
C to 125
∞
C.
Typical Application
VINA
Si4404DY
(x2)
4.5m
2.2
µ
H
MBR2535CT
C
IN
120
µ
F
20V
C
OUT
150
µ
F(x2)
20V
EN/UVLO
HIDC
FREQ/2
VDD
COMP
VREF
SKIP
SYNC
SS
MIC2186
SGND
VINP
FB
V
OUT
= 12V
OUTN
CSH
V
IN
= 3.3V
PGND
3
12
9
14
6
16
7
5
11
2
8
4
10
15
13
1
60
65
70
75
80
85
90
95
0
0.5
1
1.5
2
2.5
3
EFFICIENCY (%)
OUTPUT CURRENT (A)
12V Output Efficiency
V
IN
= 3.3V
Adjustable Output Boost Converter
Features
∑ Input voltage range: 2.9V to 14V
∑ 1.6
output driver
∑ Oscillator frequency of 100kHz/200kHz/400kHz
∑ Frequency sync to 600kHz
∑ Front edge blanking
∑ PWM Current Mode Control
∑ Selectable light load SKIP mode
∑ 600
µ
A quiescent current (SKIP-Mode)
∑ 0.5
µ
A shutdown current
∑ Cycle-by-Cycle current limiting
∑ Frequency foldback protection
∑ Adjustable under-voltage lockout
∑ Precision 1.245V reference output
∑ 16 pin SOIC and QSOP package options
∑ Selectable 50% maximum duty cycle for flyback applica-
tions
Applications
∑ DC power distribution systems
∑ Wireless Modems
∑ ADSL line cards
∑ SLIC power supplies
∑ 1-and 2-cell Li Ion battery operated equipment
Micrel, Inc. ∑ 1849 Fortune Drive ∑ San Jose, CA 95131 ∑ USA ∑ tel + 1 (408) 944-0800 ∑ fax + 1 (408) 944-0970 ∑ http://www.micrel.com
Ordering Information
Part Number
Frequency
Voltage
Ambient Temp. Range
Package
MIC2186BM
100kHz/200kHz/400kHz
Adj
≠40
∞
C to +125
∞
C
16-lead SOP
MIC2186BQS
100kHz/200kHz/400kHz
Adj
≠40
∞
C to +125
∞
C
16-lead QSOP

MIC2186
Micrel
MIC2186
2
July 2002
Pin Description
Pin Number
Pin Name
Pin Function
1
VINA
Input voltage to control circuitry (2.9V to 14V).
2
SKIP
SKIP (Input): Regulator operates in PWM mode (no pulse skipping) when
pin is pulled low, and skip mode when raised to Vdd. There is no automatic
switching between PWM and skip mode available on this device.
3
SS
Soft start reduces the inrush current and delays and slows the output voltage
rise time. A 5
µ
A current source will charge the capacitor up to Vdd.
4
COMP
Compensation (Output): Internal error amplifier output. Connect to a
capacitor or series RC network to compensate the regulator's control loop.
5
SGND
Small signal ground: must be routed separately from other grounds to the (-)
terminal of Cout.
6
FB
Feedback Input - regulates FB to 1.245V.
7
EN/UVLO
Enable/Undervoltage Lockout (input): A low level on this pin will power down
the device, reducing the quiescent current to under 0.5
µ
A. This pin has two
separate thresholds, below 1.5V the output switching is disabled, and below
0.9V the device is forced into a complete micropower shutdown. The 1.5V
threshold functions as an accurate undervoltage lockout (UVLO) with 135mV
hysteresis.
8
VREF
The 1.245V reference is available on this pin. A 0.1
µ
F capacitor should be
connected form this pin to SGnd.
9
CSH
The (+) input to the current limit comparator. A built in offset of 100mV
between CSH and SGnd in conjunction with the current sense resistor sets
the current limit threshold level. This is also the (+) input to the current
amplifier.
10
VDD
3V internal linear-regulator output. Vdd is also the supply voltage bus for the
chip. Bypass to SGND with 1
µ
F. Maximum source current is 0.5mA.
11
SYNC
Frequency Synchronization (Input): Connect an external clock signal to
synchronize the oscillator. Leading edge of signal above 1.5V starts switch-
ing cycle. Connect to SGND if not used.
12
PGND
MOSFET driver power ground, connects to the bottom of the current sense
resistor and the (≠) terminal of C
IN
.
13
HIDC
High Duty Cycle. Sets duty cycle and frequency along with Freq/2. Logic
HIGH sets 85% maximum duty cycle. Logic LOW sets 50% maximum duty
cycle. See applications section for more information.
14
OUTN
High current drive for N channel MOSFET. Voltage swing is from ground to
V
IN
. R
ON
is typically 1.6
.
15
FREQ/2
Sets duty cycle and frequency along with HiDC. See applications section for
more information.
16
VINP
Power input voltage to the gate drive circuitry (2.9V to 14V). This pin is
normally connected to the output voltage.
Pin Configuration
1
VINA
SKIP
SS
COMP
SGND
FB
EN/UVLO
VREF
16 VINP
FREQ/2
OUTN
HIDC
PGND
SYNC
VDD
CSH
15
14
13
12
11
10
9
2
3
4
5
6
7
8
16-pin Narrow Body SOP (M)
16-pin QSOP (QS)

July 2002
3
MIC2186
MIC2186
Micrel
Electrical Characteristics
V
IN
A = 5V, V
IN
P = V
OUT
= 12V, SKIP = 0V, FREQ/2 = 0V, HiDC = 3V, V
CSH
= 0V, T
J
= 25
∞
C, unless otherwise specified. Bold values
indicate ≠40
∞
C < T
J
< +125
∞
C.
Parameter
Condition
Min
Typ
Max
Units
Regulation
Feedback Voltage Reference
(
±
1%)
1.233
1.245
1.258
V
(
±
2%)
1.220
1.270
V
3V
V
IN
A
9V; 0mV
CSH
75mV; (
±
3%)
1.208
1.245
1.282
V
Feedback Bias Current
50
nA
Output Voltage Line Regulation
3V
V
IN
A
9V
+0.08
% / V
Output Voltage Load Regulation
0mV
CSH
75mV
≠1.2
%
Input & V
DD
Supply
V
IN
A Input Current, PWM mode
V
SKIP
= 0V
0.7
mA
V
IN
P Input Current, PWM mode
V
SKIP
= 0V (excluding external MOSFET gate current)
2.8
mA
V
IN
A Input Current, SKIP mode
V
SKIP
= 5V
0.6
mA
Shutdown Quiescent Current
VEN/UVLO = 0V; (I
VINA
+ I
VINP
)
0.5
5
µ
A
Digital Supply Voltage (VDD)
I
L
= 0
2.82
3.0
3.18
V
Digital Supply Load Regulation
I
L
= 0 to 0.5mA
0.03
V
Undervoltage Lockout
V
DD
upper threshold (turn on threshold)
2.9
2.75
V
V
DD
lower threshold (turn off threshold)
2.65
V
Reference Output (V
REF
)
Reference Voltage
(
±
1.5%)
1.226
1.245
1.264
V
(
±
2.5%)
1.213
1.276
V
Reference Voltage Line
5V < VinA < 9V
2
mV
Regulation
Reference Voltage Load
0 < I
REF
< 100
µ
A
1
mV
Regulation
Absolute Maximum Ratings (Note 1)
Supply Voltage (V
IN
A, V
IN
P) ......................................... 15V
Digital Supply Voltage (V
DD
) ........................................... 7V
SKIP Pin Voltage (V
SKIP
) ................................. ≠0.3V to 7V
Max Duty Cycle Pin Voltage (V
HIDC
) ................ ≠0.3V to 7V
Frequency Divider Pin Voltage (V
FREQ/2
) ........ ≠0.3V to 7V
Sync Pin Voltage (V
SYNC
) ................................ ≠0.3V to 7V
Comp Pin Voltage (V
COMP
) .............................. ≠0.3V to 3V
Feedback Pin Voltage (V
FB
) ............................ ≠0.3V to 3V
Enable Pin Voltage (V
EN/UVLO
) ...................... ≠0.3V to 15V
Current Sense Voltage (V
CSH
) ......................... ≠0.3V to 1V
Power Dissipation (P
D
)
16 lead SOP .............................. 400mW @ T
A
= 85
∞
C
16 lead QSOP ........................... 245mW @ T
A
= 85
∞
C
Ambient Storage Temp ............................ ≠65
∞
C to +150
∞
C
ESD Rating (Note 3)
Operating Ratings (Note 2)
Supply Voltage (V
IN
A, V
IN
P) ........................ +2.9V to +14V
Operating Ambient Temperature ......... ≠40
∞
C
T
A
+85
∞
C
Junction Temperature ....................... ≠40
∞
C
T
J
+125
∞
C
PackageThermal Resistance
JA
16-lead SOP ............................................... 100
∞
C/W
JA
16-lead QSOP ............................................. 163
∞
C/W

MIC2186
Micrel
MIC2186
4
July 2002
Parameter
Condition
Min
Typ
Max
Units
Enable/UVLO
Enable Input Threshold
0.6
0.9
1.2
V
UVLO Threshold
1.4
1.5
1.6
V
UVLO Hysteresis
140
mV
Enable Input Current
V
EN/UVLO
= 5V
0.2
5
µ
A
Soft Start
Soft Start Current
5
µ
A
Current Limit
Current Limit Threshold Voltage
(Voltage on CSH to trip current limit)
80
100
120
mV
Error Amplifier
Error Amplifier Gain
20
V/V
Current Amplifier
Current Amplifier Gain
3.7
V/V
SKIP Input
SKIP Threshold
0.6
1.4
2.2
V
SKIP Input Current
V
SKIP
= 3V
0.1
5
µ
A
HIDC Input
HIDC Threshold
0.6
1.4
2.2
V
Oscillator Section
Oscillator Frequency (f
O
)
360
400
440
kHz
Maximum Duty Cycle
V
FB
= 1.0V, V
HIDC
= 3V
85
%
V
FB
= 1.0V, V
HIDC
= 0V
50
Minimum On Time
V
FB
= 1.5V, V
HiDC
= 3V
180
ns
FREQ/2 Frequency (f
O
)
V
HiDC
= 3V, V
FREQ/2
= 3V
170
200
230
kHz
Frequency Foldback Threshold
Measured on FB
0.3
V
Frequency Foldback Frequency
V
HiDC
= 3V, V
FREQ/2
= 0V
90
kHz
SYNC Threshold Level
0.6
1.4
2.2
V
SYNC Input Current
0.1
5
µ
A
SYNC Minimum Pulse Width
200
ns
SYNC Capture Range
Note 4
f
O
+ 15 %
600
kHz
Gate Drivers
Rise/Fall Time
C
L
= 3300pF
50
ns
Output Driver Impedance
source; V
IN
P = 12V
1.8
4
sink; V
IN
P = 12V
1.6
3.5
source; V
IN
P =5V
2.6
sink; V
IN
P = 5V
2.4
Note 1.
Absolute maximum ratings indicate limits beyond which damage to the component may occur. Electrical specifications do not apply when
operating the device outside of its operating ratings. The maximum allowable power dissipation is a function of the maximum junction
temperature, T
J(max)
, the junction-to-ambient thermal resistance,
JA
, and the ambient temperature, T
A
.
Note 2.
The device is not guaranteed to function outside its operating rating.
Note 3.
Devices are ESD sensitive. Handling precautions recommended.
Note 4.
See application information for limitations on maximum operating frequency.

July 2002
5
MIC2186
MIC2186
Micrel
Typical Characteristics
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
-40 -20
0
20
40
60
80 100
I
Q(SKIP)
(mA)
TEMPERATURE (
∞
C)
Quiescent Current vs.
Temperature (SKIP Mode)
V
IN
A = 5V
DC
V
IN
P = 12V
DC
I
Q
= I
QVINA
+I
QVINP
3.35
3.4
3.45
3.5
3.55
3.6
3.65
-60 -40 -20 0
20 40 60 80 100
I
Q(PWM)
(mA)
TEMPERATURE (
∞
C)
Quiescent Current vs.
Temperature (PWM Mode)
V
IN
A = 5V
DC
V
IN
P = 12V
DC
I
Q
= I
QVINA
+I
QVINP
0
0.5
1
1.5
2
2.5
3
3.5
4
0
2
4
6
8
10 12 14 16
I
Q
(mA)
INPUT VOLTAGE (V
INA
)
Quiescent Current vs.
Input Voltage(PWM Mode)
400kHz
200kHz
100kHz
V
IN
P =12V
DC
I
Q
= I
QVINA
+I
QVINP
0
0.5
1
1.5
2
2.5
3
3.5
4
0
2
4
6
8
10 12 14 16
I
Q(PWM)
(mA)
INPUT VOLTAGE (V
INA
)
Quiescent Current vs.
Input Voltage (PWM Mode)
V
IN
P = 5V
V
IN
P = 9V
V
IN
P = 12V
I
Q
= I
QVINA
+ I
QVINP
f
S
= 400kHz
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0
2
4
6
8
10 12 14 16
I
Q
(mA)
INPUT VOLTAGE (V
INA
)
Quiescent Current vs.
Input Voltage (SKIP Mode)
V
IN
P = 5V
DC
V
IN
P = 9V
DC
V
IN
P = 12V
DC
1.244
1.2442
1.2444
1.2446
1.2448
1.245
1.2452
0
2
4
6
8
10 12 14 16
REFERENCE VOLTAGE (V)
INPUT VOLTAGE (V
INA
)
Reference Voltage
vs. Input Voltage
V
IN
P = 12V
DC
1.2443
1.2444
1.2445
1.2446
1.2447
1.2448
1.2449
1.245
1.2451
0
20
40
60
80
100 120
REFERENCE VOLTAGE (V)
REFERENCE CURRENT (
µ
A)
Reference Voltage
vs. Reference Current
V
IN
P = 12V
DC
V
IN
A = 5V
DC
1.2436
1.2438
1.2440
1.2442
1.2444
1.2446
1.2448
1.2450
1.2452
1.2454
-40 -20
0
20
40
60
80 100
REFERENCE VOLTAGE (V)
TEMPERATURE (
∞
C)
Reference Voltage
vs. Temperature
V
IN
P = 12V
DC
V
IN
A = 5V
DC
2.80
2.85
2.90
2.95
3.00
3.05
3.10
0
2
4
6
8
10
12
14
VDD (V)
INPUT VOLTAGE (V
INA
)
VDD vs.
Input Voltage
V
IN
P = 12V
DC
2.995
3.000
3.005
3.010
3.015
3.020
3.025
3.030
3.035
0
0.2
0.4
0.6
0.8
1
1.2
VDD (V)
IVDD (mA)
VDD vs.
Load Current
V
IN
P = 12V
DC
V
IN
A = 5V
DC
2.94
2.96
2.98
3.00
3.02
3.04
3.06
3.08
-60 -40 -20 0
20 40 60 80 100
VDD (V)
TEMPERATURE (
∞
C)
VDD vs.
Temperature
V
IN
P = 12V
DC
V
IN
A = 5V
DC
0
50
100
150
200
250
300
0
2
4
6
8
10
12
14
IENABLE (
µ
A)
VENABLE (V)
Ienable vs.
Venable
V
IN
P = 12V
DC
V
IN
A = 5V
DC
85
∞
C
≠40
∞
C
20
∞
C

MIC2186
Micrel
MIC2186
6
July 2002
392
394
396
398
400
402
404
406
0
2
4
6
8
10
12
14
OSCILLATOR FREQUENCY (kHz)
INPUT VOLTAGE (V
INA
)
Oscillator Frequency
vs. Input Voltage
V
IN
P = 12V
DC
365
370
375
380
385
390
395
400
405
-50 -30 -10 10
30
50
70
90
OSCILLATOR FREQUENCY (kHz)
TEMPERATURE (
∞
C)
Oscillator Frequency
vs. Temperature
V
IN
P = 12V
DC
V
IN
A = 5V
DC
4.25
4.30
4.35
4.40
4.45
4.50
4.55
4.60
4.65
4.70
4.75
-50 -30 -10 10
30
50
70
90
SOFT START CURRENT (
µ
A)
TEMPERATURE (
∞
C)
Soft Start
vs. Temperature
V
IN
P = 12V
DC
V
IN
A = 5V
DC
0
10
20
30
40
50
60
70
80
90
100
0
2
4
6
8
10 12 14 16
OVERCURRENT THRESHOLD (mV)
VINA (V)
Overcurrent Threshold
vs. VINA
V
IN
P = 12V
DC
July 2002
7
MIC2186
MIC2186
Micrel
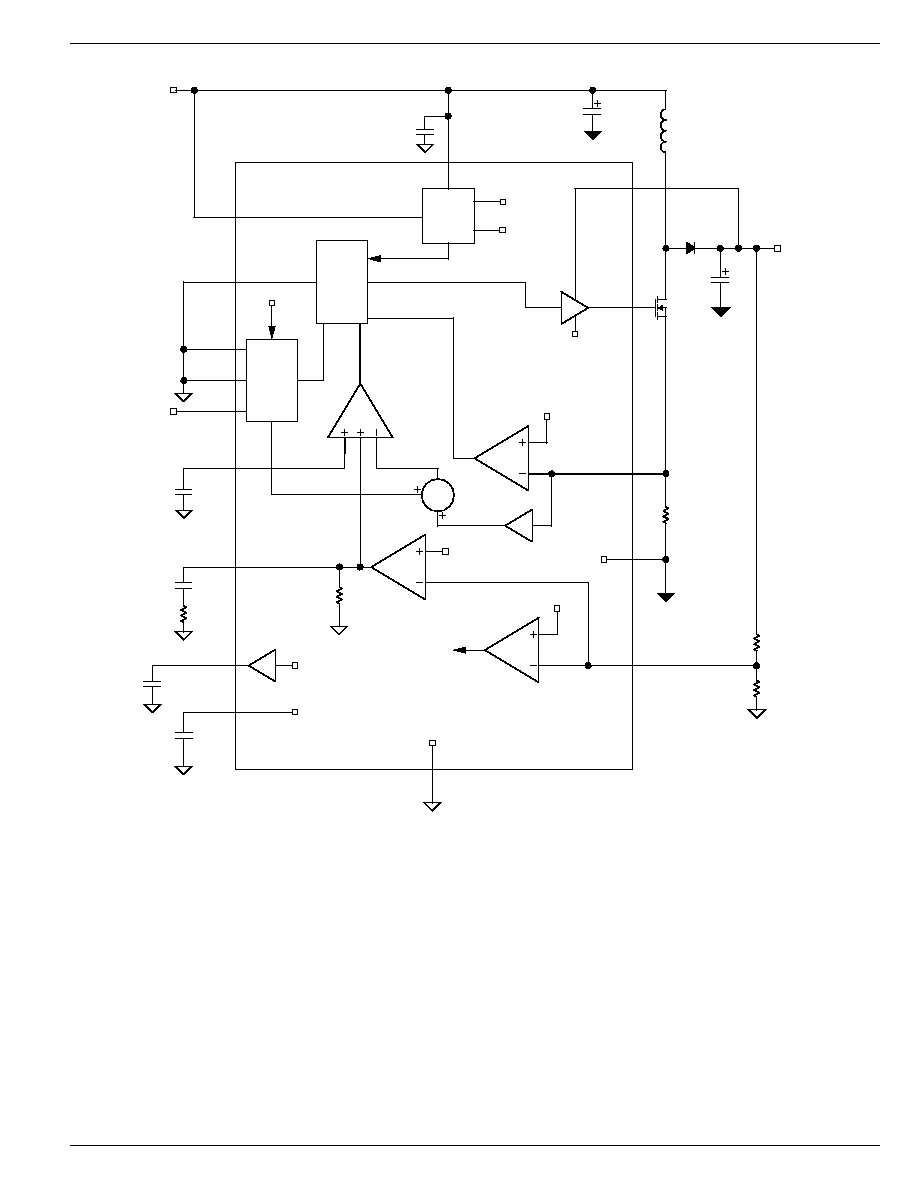
Functional Diagram
Osc
Error
Amplifier
0.1V
P
GND
D1
L1
C
IN
fs/4
V
IN
Control
Bias
PWM
Comparator
V
REF
V
REF
V
DD
S
GND
Overcurrent
Comparator
Frequency
Foldback
fs/4
Reset
Overcurrent Reset
Corrective
Ramp
On
Gain = 3.7
P
GND
12
CSH
9
OutN
14
V
IN
P
V
IN
A
16
1
V
fb
5
S
GND
6
V
DD
10
V
REF
8
COMP
4
Soft Start
3
HiDC
V
DD
13
Sync
11
Freq/2
15
SKIP
2
EN/UVLO
7
gm = 0.0002
Gain = 20
0.3V
100k
R2
R1
R
SENSE
C
OUT
V
OUT
P
GND
V
REF
C
DECOUP
V
DD
Figure 1. MIC2186 PWM Block Diagram
Functional Description
The MIC2186 is a BiCMOS, switched mode multi-topology
controller. It will operate most low side drive topologies
including boost, SEPIC, flyback and forward. The controller
has a low impedance driver capable of switching large N-
channel MOSFETs. It features multiple frequency and duty
cycle settings. Current mode control is used to achieve
superior transient line and load regulation. An internal correc-
tive ramp provides slope compensation for stable operation
above a 50% duty cycle. The controller is optimized for high
efficiency, high performance DC-DC converter applications.
Figure 1 shows a block diagram of the MIC2186 configured
as a PWM boost converter.
The switching cycle starts when OutN goes high and turns on
the low side, N-channel MOSFET, Q1. The Vgs of the
MOSFET is equal to V
IN
P. This forces current to ramp up in
the inductor. The inductor current flows through the current
sense resistor, Rsense. The voltage across the resistor is
amplified and combined with an internal ramp for stability.
This signal is compared with the error voltage signal from the
error amplifier. When the current signal equals the error
voltage signal, the low side MOSFET is turned off. The
inductor current then flows through the diode, D1, to the
output. The MOSFET remains off until the beginning of the
next switching cycle.

MIC2186
Micrel
MIC2186
8
July 2002
Control Loop
PWM and SKIP modes of operation
The MIC2186 can operate in either PWM (pulse width modu-
lated) or SKIP mode. The efficiency of the boost converter
can be improved at lower output loads by manually selecting
the skip mode of operation. The potential disadvantage of
skip mode is the variable switching frequency that accompa-
nies this mode of operation. The occurrence of switching
pulses depends on component values as well as line and load
conditions. PWM mode is the best choice of operation at
higher output loads. PWM mode has the advantages of lower
output ripple voltage and higher efficiencies at higher output
loads. Pulling the SKIP pin (pin 3) low will force the controller
to operate in PWM mode for all load conditions. Pulling the
SKIP pin high will force the controller to operate in SKIP
mode.
The description of the MIC2186 controller is broken
down into 6 basic functions.
∑ Control Loop
∑ PWM Operation
∑ SKIP Mode Operation
∑ Current Limit
∑ MOSFET gate drive
∑ Reference, enable & UVLO
∑ Oscillator & Sync
∑ Soft start
Osc
P
GND
D1
Q1
L1
V
IN
Control
Bias
V
REF
V
DD
S
GND
Skip Current
Limit Comparator
Hysteresis
Comparator
±
1%
F/2=H 2us off-time
F/2=L 1us off-time
Current
Reset
On
P
GND
12
CSH
9
OutN
14
V
IN
P
V
IN
A
16
1
V
fb
5
S
GND
6
V
DD
10
V
REF
8
COMP
4
Soft Start
3
HiDC
13
Sync
11
Freq/2
15
SKIP
2
EN/UVLO
7
50mV
V
DD
V
REF
1.245V
R2
R1
R
SENSE
C
OUT
V
OUT
P
GND
V
REF
C
DECOUP
C
IN
V
DD
Figure 2. MIC2186 SKIP Mode Block Diagram

July 2002
9
MIC2186
MIC2186
Micrel
SKIP Mode Operation
This control method is used to improve efficiency at low
output loads. A block diagram of the MIC2186 SKIP mode is
shown in Figure 2. The power drawn by the MIC2186 control
IC is (I
VIN
A ∑ V
IN
A )+ (I
VIN
P ∑ V
IN
P). The power dissipated by
the IC can be a significant portion of the total output power
during periods of low output current, which lowers the effi-
ciency of the power supply. In SKIP mode the MIC2186
lowers the IC supply current by turning off portions of the
control and drive circuitry when the IC is not switching. The
disadvantage of this method is greater output ripple and
variable switching frequency. The soft start, HiDC and Sync
pins have no effect when operating in SKIP mode.
In SKIP mode, switching starts when the feedback voltage
drops below the lower threshold level of the hysteresis
comparator. The OutN pin goes high, turning on the N-
channel MOSFET, Q1. Current ramps up in the inductor until
either the current limit comparator or the hysteretic voltage
comparator turns off Q1's gate drive. If the feedback voltage
exceeds the upper hysteretic threshold, Q1's gate drive is
terminated. However, if the voltage at the CSH pin exceeds
the SKIP mode current limit threshold, it terminates the gate
drive for that switching cycle. The gate drive remains off for
a constant period at the end of each switching cycle. This off
time period is typically 1
µ
s when the F/2 pin is low and 2
µ
s
when the F/2 pin is high. Figure 3 shows some typical SKIP
mode switching waveforms.
I
IND
@5A/div
MOSFET gate
drive @ 10V/div
Switch Node Voltage
(MOSFET Drain)
@10V/div
VOUT Ripple Voltage
@100mV/div
V
IN
= 3V
V
O
= 9V
I
O
= 0.6A
SKIP Mode Waveforms
TIME (10
µ
s/div)
Figure 3. SKIP Mode Waveform
The SKIP mode current threshold limits the peak inductor
current per cycle. Depending on the input, output and circuit
parameters, many switching cycles can occur before the
feedback voltage exceeds the upper hysteretic threshold.
Once the voltage on the feedback pin exceeds the upper
hysteretic threshold the gate drive is disabled. The output
load discharges the output capacitance causing Vout to
decrease until the feedback voltage drops below the lower
threshold voltage limit. The switching converter then turns the
gate drive back on. While the gate drive is disabled, the
MIC2186 draws less IC supply current then while it is switch-
ing, thereby improving efficiency at low output loads. Figure
4 shows the efficiency improvement at low output loads when
SKIP mode is selected.
0
10
20
30
40
50
60
70
80
0
0.05
0.1
0.15
0.2
0.25
EFFICIENCY (%)
INPUT CURRENT (A)
Low Current
Efficiency
SKIP Mode
PWM Mode
Figure 4.
The maximum peak inductor current depends on the skip
current limit threshold and the value of the current sense
resistor, Rsense. For a typical 50mV current limit threshold in
SKIP Mode, the peak inductor current is:
I
50mV
R
INDUCTOR_pk
SENSE
=
The maximum output current is SKIP mode depends on the
input conditions, output conditions and circuit component
values. Assuming a discontinuous mode where the inductor
current starts from zero at each cycle, the maximum output
current is calculated below:
I
2.5 10
L
fs
2 R
V
V
O(max)
3
SENSE
2
O
IN
=
◊
◊ ◊
◊
◊
- ◊
(
)
-
where:
Iomax is the maximum output current
Vo is the output voltage
Vin is the input voltage
L is the value of the boost inductor
fs is the switching frequency
is the efficiency of the boost converter
Rsense it the value of the current sense resistor
2.5∑10
-3
is a constant based on the SKIP mode
current threshold (50mV)
2
PWM Operation
Figure 5 shows typical waveforms for PWM mode of opera-
tion. The gate drive signal turns on the external MOSFET
which allows the inductor current to ramp up. When the
MOSFET turns off, the inductor forces the MOSFET drain
voltage to rise until the boost diode turns on and the voltage
is clamped at approximately the output voltage.

MIC2186
Micrel
MIC2186
10
July 2002
Conditions:
V
IN
= 3V
V
O
= 9V
I
O
= 0.6A
MOSFET gate
drive @ 10V/div
Switch Node Voltage
(MOSFET Drain)
@10V/div
VOUT Ripple Voltage
@50mV/div
Inductor Current @
1A/div
PWM Mode Waveforms
TIME (1
µ
s/div)
Figure 5 - PWM mode waveforms
The MIC2186 uses current mode control to improve output
regulation and simplify compensation of the control loop.
Current mode control senses both the output voltage (outer
loop) and the inductor current (inner loop). It uses the inductor
current and output voltage to determine the duty cycle (D) of
the buck converter. Sampling the inductor current effectively
removes the inductor from the control loop, which simplifies
compensation. A simplified current mode control diagram is
shown in Figure 6.
I_inductor
T
ON
T
PER
V
COMP
I_inductor
I_inductor
Gate Driver
I_inductor
Voltage
Divider
V
REF
V
IN
Gate Drive at OutN
Figure 6: PWM Control Loop
A block diagram of the MIC2186 PWM current mode control
loop is shown in Figure 1. The inductor current is sensed by
measuring the voltage across a resistor, Rsense. The current
sense amplifier buffers and amplifies this signal. A ramp is
added to this signal to provide slope compensation, which is
required in current mode control to prevent unstable opera-
tion at duty cycles greater than 50%.
A transconductance amplifier is used as an error amplifier,
which compares an attenuated output voltage with a refer-
ence voltage. The output of the error amplifier is compared to
the current sense waveform in the PWM block. When the
current signal rises above the error voltage, the comparator
turns off the low side drive. The error signal is brought out to
the COMP pin (pin 4) to provide access to the output of the
error amplifier. This allows the use of external components to
stabilize the voltage loop.
Current Sensing and Overcurrent Protection
The inductor current is sensed during the switch on time by
a current sense resistor located between the source of the
MOSFET and ground (Rsense in Figure 1). Exceeding the
current limit threshold will immediately terminate the gate
drive of the N-channel MOSFET, Q1. This forces the Q1 to
operate at a reduced duty cycle, which lowers the output
voltage. In a boost converter, the overcurrent limit will not
protect the power supply or load during a severe
overcurrent condition or short circuit condition. If the
output is short-circuited to ground, current will flow from the
input, through the inductor and output diode to ground. Only
the impedance of the source and components limits the
current.
The mode of operation (continuous or discontinuous), the
minimum input voltage, maximum output power and the
minimum value of the current limit threshold determine the
value of the current sense resistor. Discontinuous mode is
where all the energy in the inductor is delivered to the output
at each switching cycle. Continuous mode of operation
occurs when current always flows in the inductor, during both
the low-side MOSFET on and off times. The equations below
will help to determine the current sense resistor value for
each operating mode.
The critical value of output current in a boost converter is
calculated below. The operating mode is discontinuous if the
output current is below this value and is continuous if above
this value.
I
V
V
V
2
fs L
V
CRIT
IN
2
O
IN
O
2
=
◊
-
(
)
◊
◊ ◊ ◊
where:
is the efficiency of the boost converter
Vin is the minimum input voltage
L is the value of the boost inductor
Fs is the switching frequency
Vo is the output voltage
Maximum Peak Current in Discontinuous Mode:
The peak inductor current is:
I
2 I
V
V
L
fs
IND(pk)
O
O
IN
=
◊
◊
- ◊
(
)
◊
where:
Io is the maximum output current
Vo is the output voltage
Vin is the minimum input voltage
L is the value of the boost inductor
fs is the switching frequency
is the efficiency of the boost converter
The maximum value of current sense resistor is:

July 2002
11
MIC2186
MIC2186
Micrel
R
V
I
SENSE
SENSE
IND(pk)
=
where:
Vsense is the minimum current sense threshold
of the CSH pin
Maximum Peak Current in Continuous Mode:
The peak inductor current is equal to the average inductor
current plus one half of the peak to peak inductor current.
The peak inductor current is:
I
I
1
2
I
I
V
I
V
V
V
V
2
V
fs L
IND(pk)
IND(ave)
IND(pp)
IND(pk)
O
O
IN
L
O
IN
O
=
+ ◊
=
◊
◊
+
◊
-
◊
(
)
◊
◊ ◊
where:
Io is the maximum output current
Vo is the output voltage
Vin is the minimum input voltage
L is the value of the boost inductor
fs is the switching frequency
is the efficiency of the boost converter
VL is the voltage across the inductor
VL may be approximated as Vin for higher input voltage.
However, the voltage drop across the inductor winding resis-
tance and low side MOSFET on-resistance must be ac-
counted for at the lower input voltages that the MIC2186
operates at.
V
V
V
I
V
R
R
L
IN
O
O
IN
WINDING
DSON
=
-
◊
◊
◊
+
(
)
where:
Rwinding is the winding resistance of the inductor
Rdson is the on resistance of the low side switching
MOSFET
The maximum value of current sense resistor is:
R
V
I
SENSE
SENSE
IND(pk)
=
where:
V
SENSE
is the minimum current sense threshold
of the CSH pin
The current sense pin, CSH, is noise sensitive due to the low
signal level. The current sense voltage measurement is
referenced to the signal ground pin of the MIC2186. The
current sense resistor ground should be located close to the
IC ground. Make sure there are no high currents flowing in this
trace. The PCB trace between the high side of the current
sense resistor and the CHS pin should also be short and
routed close to the ground connection. The input to the
internal current sense amplifier has a 30nS dead time at the
beginning of each switching cycle. This dead time prevents
leading edge current spikes from prematurely terminating the
switching cycle. A small RC filter between the current sense
pin and current sense resistor may help to attenuate larger
switching spikes or high frequency switching noise. Adding
the filter slows down the current sense signal, which has the
effect of slightly raising the overcurrent limit threshold.
MOSFET Gate Drive
The MIC2186 converter drives a low side N-channel MOSFET.
The driver for the OutN pin has a 1.6
typical source and sink
impedance. The VinP pin is the supply pin for the gate drive
circuit. It typically connected to the output. The maximum
supply voltage to the VinP pin is 14V. If the output voltage is
greater than 14V or if it is desired to drive the MOSFET with
a voltage less than Vout, the VinP pin can be connected to the
input or to an separate supply voltage.
MOSFET Selection
In a boost converter, the Vds of the MOSFET is approxi-
mately equal to the output voltage. The maximum Vds rating
of the MOSFET must be high enough to allow for ringing and
spikes in addition to the output voltage.
The VinP pin supplies the N-channel gate drive voltage. The
Vgs threshold voltage of the N-channel MOSFET must be low
enough to operate at the minimum VinP voltage to guarantee
the boost converter will start up.
The maximum amout of MOSFET gate charge that can be
driven is limited by the power dissipation in the MIC2186. The
power dissipated by the gate drive circuitry is calculated
below:
P_gate_drive=Q_gate * VinP * fs
where:
Q_gate is the total gate charge of the external
MOSFET
The graph in Figure 7 shows the total gate charge which can
be driven by the MIC2186 over the input voltage range, for
different values of switching frequency. Higher gate charge
will slow down the turn-on and turn-off times of the MOSFET,
which increases switching losses.
0
20
40
60
80
100
120
140
160
180
200
220
0
2
4
6
8
10
12
14
MAXIMUM GATE CHARGE (nC)
V
IN
P (V)
Power Dissipation
vs. Frequency
200kHz
100kHz
400kHz
600kHz
500kHz
Figure 7 - MIC2186 freq vs pdiss
External Schottky Diode
In a boost converter topology, the boost diode, D1 must be
rated to handle the peak and average current. The average
current through the diode is equal to the average output
current of the boost converter. The peak current is calculated
in the current limit section of this specification.

MIC2186
Micrel
MIC2186
12
July 2002
The reverse voltage requirement of the diode is:
For the MIC2186, Schottky diodes are recommended when
they can be used. They have a lower forward voltage drop
than ultra-fast rectifier diodes, which lowers power dissipa-
tion and improves efficiency. They also do not have a recov-
ery time mechanism, which results in less ringing and noise
when the diode turns off. If the output voltage of the circuit
prevents the use of a Schottky diode, then only ultra-fast
recovery diodes should be used. Slower diodes will dissipate
more power in both the MOSFET and the diode. The will also
cause excessive ringing and noise when the diode turns off.
Reference, Enable and UVLO Circuits
The output drivers are enabled when the following conditions
are satisfied:
∑ The Vdd voltage (pin 10) is greater than its
undervoltage threshold.
∑ The voltage on the enable pin is greater than the
enable UVLO threshold.
The internal bias circuitry generates a 1.245V bandgap
reference for the voltage error amplifier and a 3V Vdd voltage
for the internal supply bus. The reference voltage in the
MIC2186 is buffered and brought out to pin 8. The Vref pin
must be bypassed to GND (pin 4) with a 0.1uf capacitor. The
Vdd pin must be decoupled to ground with a 1uf ceramic
capacitor.
The enable pin (pin 7) has two threshold levels, allowing the
MIC2186 to shut down in a micro-current mode, or turn off
output switching in standby mode. Below 0.9V, the device is
forced into a micro-power shutdown. If the enable pin is
between 0.9V and 1.5V the output gate drive is disabled but
the internal circuitry is powered on and the soft start pin
voltage is forced low. There is typically 135mV of hysteresis
below the 1.5V threshold to insure the part does not oscillate
on and off due to ripple voltage on the input. Raising the
enable voltage above the UVLO threshold of 1.5V enables
the output drivers and allows the soft start capacitor to
charge. The enable pin may be pulled up to VinA.
Oscillator & Sync
The internal oscillator is self-contained and requires no
external components. The HiDC and f/2 pins allow the user
to select from three different switching frequencies and two
maximum duty cycles. The chart in Table 1 shows the four
combinations that can be programmed along with the typical
minimum and maximum duty cycles.
n
i
p
2
/
F
l
e
v
e
L
C
D
i
H
l
e
v
e
L
g
n
i
h
c
t
i
w
S
y
c
n
e
u
q
e
r
F
m
u
m
i
x
a
M
e
l
c
y
C
y
t
u
D
l
a
c
i
p
y
T
m
u
m
i
n
i
M
e
l
c
y
C
y
t
u
D
T
F
F
O
n
i
e
d
o
M
p
i
k
S
0
1
z
H
k
0
0
4
%
5
8
%
7
s
µ
1
1
1
z
H
k
0
0
2
%
5
8
%
6
s
µ
2
0
0
z
H
k
0
0
2
%
0
5
%
4
s
µ
1
1
0
z
H
k
0
0
1
%
0
5
%
3
s
µ
2
Table 1
Minimum duty cycle becomes important in a boost converter
as the input voltage approaches the output voltage. At lower
duty cycles, the input voltage can be closer to the output
voltage without the output rising out of regulation.
A frequency foldback mode is enabled if the voltage on the
feedback pin (pin 6) is less than 0.3V. In frequency foldback
the oscillator frequency is reduced by approximately a factor
of 4. For the 400kHz setting, the oscillator runs at 100khz in
frequency foldback. For a 200kHz setting the oscillator runs
at approximately 50kHz and for a 100kHz setting, the oscil-
lator runs at approximately 25kHz.
The SYNC input (pin 11) allows the MIC2186 to synchronize
with an external CMOS or TTL clock signal. Depending on the
setting of the HiDC pin,the output frequency is either equal to
or 1/2 of the sync input frequency. If the HiDC level is low, the
output switching frequency is half the sync frequency. If the
HiDC level is high, the output switching frequency is equal to
the sync frequency.
The rising edge of the sync signal generates a reset signal in
the oscillator, which turns off the high-side gate drive output.
The low-side drive is turned on, restarting the switching cycle.
The sync signal is inhibited when the controller operates in
skip mode or frequency foldback. The sync signal frequency
must be greater than the maximum specified free running
frequency of the MIC2186. If the synchronizing frequency is
lower, double pulsing of the gate drive outputs will occur.
When not used, the sync pin must be connected to ground.
Table 2 shows the minimum recommended sync frequencies
for the different combinations of f/2 and HiDC inputs.
Figure 8a shows the timing between the external sync signal
(trace 2) and the low-side drive (trace 1) for a high level on the
HiDC pin. Figure 8b shows the timing between the external
sync signal (trace 2) and the low-side drive (trace 1) for a low
level on the HiDC pin. The sync frequency is twice the output
switching frequency.
n
i
p
2
/
F
l
e
v
e
L
C
D
i
H
l
e
v
e
L
g
n
i
t
a
l
l
i
c
s
O
f
l
e
S
y
c
n
e
u
q
e
r
F
m
u
m
i
n
i
M
d
e
d
n
e
m
m
o
c
e
R
y
c
n
e
u
q
e
r
F
c
n
y
S
y
c
n
e
u
q
e
r
F
t
u
p
n
I
c
n
y
S
f
S
y
c
n
e
u
q
e
r
f
g
n
i
h
c
t
i
w
s
t
u
p
t
u
o
=
f
C
N
Y
S
y
c
n
e
u
q
e
r
f
t
u
p
n
i
c
n
y
s
=
0
1
z
H
k
0
0
4
z
H
k
0
8
4
f
S
f
=
C
N
Y
S
1
1
z
H
k
0
0
2
z
H
k
0
5
2
f
S
f
=
C
N
Y
S
0
0
z
H
k
0
0
2
z
H
k
0
8
4
f
S
=
1
/
2
f
C
N
Y
S
1
0
z
H
k
0
0
1
z
H
k
0
5
2
f
S
=
1
/
2
f
C
N
Y
S
Table 2

July 2002
13
MIC2186
MIC2186
Micrel
MIC2186 Sync
Conditions:
HiDC = HIGH
F/2 = LOW
Gat Drive Output
(Pin 14)
Sync Input
(Pin 11)
Figure 8a.
MIC2186 Sync
Conditions:
HiDC = LOW
F/2 = LOW
Gat Drive Output
(Pin 14)
Sync Input
(Pin 11)
Figure 8b.
The maximum recommended output switching frequency is
600kHz. Synchronizing to higher frequencies may be pos-
sible, however there are some concerns. As the switching
frequency is increased, the switching period decreases. The
minimum on-time in the MIC2186 becomes a greater part of
the total switching period. This may prevent proper operation
as Vin approaches Vout and may also minimize the effective-
ness of the current limit circuitry. The maximum duty cycle
decreases as the sync frequency is increased. Figure 9
shows the relationship between the minimum/maximum duty
cycle and frequency.
40
45
50
55
60
65
70
75
80
85
250 300 350 400 450 500 550 600
MAXIMUM DUTY CYCLE (%)
SYNC FREQUENCY (kHz)
Max. Duty Cycle
vs. Frequency
HiDC=L
F/2=H
HiDC=L
F/2=L
HiDC=H
F/2=L
HiDC=H
F/2=H
Figure 9.
Soft start
Soft start reduces the power supply input surge current at
start up by limiting the output voltage risetime. Input surge
current occurs when the boost converter charges up the
output capacitance. Slowing the output risetime lowers the
input surge current. Soft start may also be used for power
supply sequencing. The soft start cannot control the initial
surge in current in a boost converter when Vin is applied. This
surge current is caused by the output capacitance charging
up to the input voltage. The current flows from the input
through the inductor and output diode to the output capaci-
tors.
The soft start voltage is applied directly to the PWM compara-
tor. A 5uA internal current source is used to charge up the soft
start capacitor. Either of 2 UVLO conditions will pull the soft
start capacitor low.
* When the Vdd voltage drops below its UVLO
threshold
* When the enable pin drops below its 1.5V UVLO
threshold
The part switches at a low duty cycle when the soft start pin
voltage zero. As the soft start voltage rises from 0V to 0.7V,
the duty cycle increases from the minimum duty cycle to the
operating duty cycle. The oscillator runs at the foldback
frequency until the feedback voltage rises above 0.3V. In a
boost converter the output voltage is equal to the input
voltage before the MIC2186 starts switching. If the ratio of
Vout/Vin is low, the voltage on the feedback pin will already
be greater than 0.3V and the converter begin switching at the
selected operating frequency.
The risetime of the output is dependent on the soft start
capacitor, output capacitance, input and output voltage and
load current. The scope photo in Figure 10 show the output
voltage and the soft start pin voltage at startup. The output
voltage is initially at the input voltage less a diode drop. After
the converter is enabled the output slowly rises due to the
minimum duty cycle of the controller. As the soft start voltage
increases, the output voltage rises in a controlled fashion until
the output voltage reaches the regulated value.
Soft Start
0V
Figure 10.
Voltage Setting Components
The MIC2186 requires two resistors to set the output voltage
as shown in figure 11

MIC2186
Micrel
MIC2186
14
July 2002
Pin
6
Voltage
Amplifier
V
REF
1.245V
MIC2186
R1
R2
Figure 11.
The output voltage is determined by the equation below.
V
V
1
R1
R2
O
REF
=
◊ +
Where: Vref for the MIC2186 is nominally 1.245V. Lower
values of resistance are preferred to prevent noise from
apprearing on the Vfb pin. A typically recommended value for
R1 is 10K.
Decoupling Capacitor Selection
The 1uf decoupling capacitor is used to stabilize the internal
regulator and minimize noise on the Vdd pin. Placement of
this capacitor is critical to the proper operation of the MIC2186.
It must be next to the Vdd and signal ground pins and routed
with wide etch. The capacitor should be a good quality
ceramic. Incorrect placement of the Vdd decoupling capaci-
tor will cause jitter and/or oscillations in the switching wave-
form as well as variations in the overcurrent limit.
A minimum 0.1uf ceramic capacitor is required to decouple
the Vin. The capacitor should be placed near the IC and
connected directly between pins 10 (Vcc) and 5 (SGND). A
0.1uf capacitor is required to decouple Vref. It should be
located near the Vref pin.
Efficiency calculation and considerations
Efficiency is the ratio of output power to input power. The
difference is dissipated as heat in the boost converter. The
significant contributors at light output loads are:
* The VinA pin supply current.
* The VinP pin supply current which includes the
current required to switch the external
MOSFETs
* Core losses in the inductor
To maximize efficiency at light loads:
* Use a low gate charge MOSFET or use the
smallest MOSFET, which is still adequate for the
maximum output current.
* Allow the MIC2186 to run in skip mode at lower
currents. If running in PWM mode, set the
MIC2186 to switch at a lower frequency.
* se a ferrite material for the inductor core, which
has less core loss than an MPP or iron power
core.
The significant contributors to power loss at higher output
loads are (in approximate order of magnitude):
* Resistive on-time losses in the MOSFET
* Switching transition losses in the MOSFET
* Inductor resistive losses
* Current sense resistor losses
* Output capacitor resistive losses (due to the
capacitor's ESR)
To minimize power loss under heavy loads:
* Use Logic level, low on resistance MOSFETs.
Multiplying the gate charge by the on resistance
gives a figure of merit, providing a good balance
between switching and resistive power dissipa-
tion.
* Slow transition times and oscillations on the
voltage and current waveforms dissipate more
power during the turn-on and turn-off of the low
side MOSFET. A clean layout will minimize
parasitic inductance and capacitance in the gate
drive and high current paths. This will allow the
fastest transition times and waveforms without
oscillations. Low gate charge MOSFETs will
switch faster than those with higher gate charge
specifications.
* For the same size inductor, a lower value will
have fewer turns and therefore, lower winding
resistance. However, using too small of a value
will increase the inductor current and therefore
require more output capacitors to filter the output
ripple.
* Lowering the current sense resistor value will
decrease the power dissipated in the resistor.
However, it will also increase the overcurrent
limit and may require larger MOSFETs and
inductor components to handle the higher
currents.
* Use low ESR output capacitors to minimize the
power dissipated in the capacitor's ESR.

July 2002
15
MIC2186
MIC2186
Micrel
Package Information
45
∞
0
∞
≠8
∞
0.244 (6.20)
0.228 (5.79)
0.394 (10.00)
0.386 (9.80)
SEATING
PLANE
0.020 (0.51)
REF
0.020 (0.51)
0.013 (0.33)
0.157 (3.99)
0.150 (3.81)
0.050 (1.27)
0.016 (0.40)
0.0648 (1.646)
0.0434 (1.102)
0.050 (1.27)
BSC
PIN 1
DIMENSIONS:
INCHES (MM)
0.0098 (0.249)
0.0040 (0.102)
16-Pin SOIC (M)
45
∞
0.2284 (5.801)
0.2240 (5.690)
SEATING
PLANE
0.009 (0.2286)
REF
0.012 (0.30)
0.008 (0.20)
0.157 (3.99)
0.150 (3.81)
0.050 (1.27)
0.016 (0.40)
0.0688 (1.748)
0.0532 (1.351)
0.196 (4.98)
0.189 (4.80)
0.025 (0.635)
BSC
PIN 1
DIMENSIONS:
INCHES (MM)
0.0098 (0.249)
0.0040 (0.102)
0.0098 (0.249)
0.0075 (0.190)
8
∞
0
∞
16-Pin QSOP (QS)

MIC2186
Micrel
MIC2186
16
July 2002
MICREL INC.
1849 FORTUNE DRIVE
SAN JOSE, CA 95131
USA
TEL
+ 1 (408) 944-0800
FAX
+ 1 (408) 944-0970
WEB
http://www.micrel.com
This information is believed to be accurate and reliable, however no responsibility is assumed by Micrel for its use nor for any infringement of patents or
other rights of third parties resulting from its use. No license is granted by implication or otherwise under any patent or patent right of Micrel Inc.
© 2001 Micrel Incorporated