
DSP56853/D
Rev. # 2.0 3/2003
© Motorola, Inc., 2003. All rights reserved.
DSP56853
Preliminary Technical Data
DSP56853 16-bit Digital Signal Processor
∑ 120 MIPS at 120MHz
∑ 12K x 16-bit Program SRAM
∑ 4K x 16-bit Data SRAM
∑ 1K x 16-bit Boot ROM
∑ Access up to 2M words of program memory or 8M
of data memory
∑ Chip Select Logic for glue-less interface to ROM
and SRAM
∑ Six (6) independent channels of DMA
∑ Enhanced Synchronous Serial Interfaces (ESSI)
∑ Two (2) Serial Communication Interfaces (SCI)
∑ Serial Port Interface (SPI)
∑ 8-bit Parallel Host Interface
∑ General Purpose 16-bit Quad Timer
∑ JTAG/Enhanced On-Chip Emulation (OnCETM) for
unobtrusive, real-time debugging
∑ Computer Operating Properly (COP)/Watchdog
Timer
∑ Time-of-Day (TOD)
∑ 128 LQFP package
∑ Up to 41 GPIO
Figure 1. DSP56853 Block Diagram
JTAG/
Enhanced
OnCE
Program Controller
and
Hardware Looping Unit
Data ALU
16 x 16 + 36
36-Bit MAC
Three 16-bit Input Registers
Four 36-bit Accumulators
Address
Generation Unit
Bit
Manipulation
Unit
16-Bit
DSP56800E Core
XTAL
EXTAL
Interrupt
Controller
Quad
Timer
or
GPIOG
4
CLKO
External Address
Bus Switch
External Bus
Interface Unit
4
RESET
IRQA
IRQB
V
DD
V
SSIO
V
DDA
V
SSA
External Data
Bus Switch
Bus Control
WR Enable
RD Enable
CS0-CS3[3:0] or
A0-20 [20:0]
MODEA-C or
D0-D15 [15:0]
6
Program Memory
12,288 x 16 SRAM
Boot ROM
1024 x 16 ROM
Data Memory
4,096 x 16 SRAM
PDB
PDB
XAB1
XAB2
XDB2
CDBR
SPI
or
GPIOF
2 SCI
or
GPIOE
IPBus Bridge (IPBB)
3
(GPIOH0-H2)
6
10
V
DDIO
11
Decoding
Peripherals
4
System
Bus
Control
Memory
PAB
PAB
CDBW
CDBR
CDBW
V
SS
6
GPIOA0-A3[3:0]
6
ESSI0
or
GPIOC
Host
Interface
or
GPIOB
16
RSTO
DMA
6 channel
POR
Integration
Module
System
COP/
Watch-
dog
Time
of
Day
Clock
Generator
OSC PLL
IPBus CLK
COP/TOD CLK
Co
r
e
CLK
IP
AB
IPW
D
B
IP
RDB
DM
A
Reques
t
s

2
DSP56853 Preliminary Technical Data
MOTOROLA
Part 1 Overview
1.1 DSP56853 Features
1.1.1
Digital Signal Processing Core
∑
Efficient 16-bit DSP engine with dual Harvard architecture
∑
120 Million Instructions Per Second (MIPS) at 120MHz core frequency
∑
Single-cycle 16
◊ 16-bit parallel Multiplier-Accumulator (MAC)
∑
Four (4) 36-bit accumulators including extension bits
∑
16-bit bidirectional shifter
∑
Parallel instruction set with unique DSP addressing modes
∑
Hardware DO and REP loops
∑
Three (3) internal address buses and one (1) external address bus
∑
Four (4) internal data buses and one (1) external data bus
∑
Instruction set supports both DSP and controller functions
∑
Four (4) hardware interrupt levels
∑
Five (5) software interrupt levels
∑
Controller-style addressing modes and instructions for compact code
∑
Efficient C Compiler and local variable support
∑
Software subroutine and interrupt stack with depth limited only by memory
∑
JTAG/Enhanced OnCE debug programming interface
1.1.2
Memory
∑
Harvard architecture permits up to three (3) simultaneous accesses to program and data memory
∑
On-Chip Memory
-- 12K
◊ 16-bit Program SRAM
-- 4K
◊ 16-bit Data SRAM
-- 1K
◊ 16-bit Boot ROM
∑
Off-Chip Memory Expansion (EMI)
-- Access up to 2M words of program memory or 8M data memory
-- Chip Select Logic for glue-less interface to ROM and SRAM
1.1.3
Peripheral Circuits for DSP56853
∑
General Purpose 16-bit Quad Timer*
∑
Two (2) Serial Communication Interfaces (SCI)*
∑
Serial Peripheral Interface (SPI) Port*
∑
Enhanced Synchronous Serial Interface (ESSI) modules*
∑
Computer Operating Properly (COP)

DSP56853 Description
MOTOROLA
DSP56853 Preliminary Technical Data
3
∑
Watchdog Timer
∑
JTAG/Enhanced On-Chip Emulation (OnCE) for unobtrusive, real-time debugging
∑
Six (6) independent channels of DMA
∑
8-bit Parallel Host Interface*
∑
Time-of-Day (TOD)
∑
128 LQFP package
∑
Up to 41 GPIO
* Each peripheral I/O can be used alternately as a General Purpose I/O if not needed
1.1.4
Energy Information
∑
Fabricated in high-density CMOS with 3.3V, TTL-compatible digital inputs
∑
Wait and Stop modes available
1.2 DSP56853 Description
The DSP56853 is a member of the DSP56800E core-based family of Digital Signal Processors (DSPs). It
combines, on a single chip, the processing power of a DSP and the functionality of a microcontroller with
a flexible set of peripherals to create an extremely cost-effective solution. Because of its low cost,
configuration flexibility, and compact program code, the DSP56853 is well-suited for many applications.
The DSP56853 includes many peripherals that are especially useful for low-end Internet appliance
applications and low-end client applications such as telephony; portable devices;; Internet audio and point-
of-sale systems, such as noise suppression; ID tag readers; sonic/subsonic detectors; security access
devices; remote metering; sonic alarms.
The Product Family core is based on a Harvard-style architecture consisting of three execution units
operating in parallel, allowing as many as six operations per instruction cycle. The microprocessor-style
programming model and optimized instruction set allow straightforward generation of efficient, compact
code for both DSP and MCU applications. The instruction set is also highly efficient for C Compilers,
enabling rapid development of optimized control applications.
The DSP56853 supports program execution from either internal or external memories. Two data operands
can be accessed from the on-chip Data RAM per instruction cycle. The DSP56853 also provides two
external dedicated interrupt lines, and up to 41 General Purpose Input/Output (GPIO) lines, depending on
peripheral configuration.
The DSP56853 DSP controller includes 12K words of Program RAM, 4K words of Data RAM, and 1K
words of Boot ROM. It also supports program execution from external memory. The DSP56800 core can
access two data operands from the on-chip Data RAM per instruction cycle.
This DSP controller also provides a full set of standard programmable peripherals that include an 8-bit
parallel Host Interface, Enhanced Synchronous Serial Interface (ESSI), one Serial Peripheral Interface
(SPI), the option to select a second SPI or two Serial Communications Interfaces (SCIs), and Quad Timer.
The Host Interface, ESSI, SPI, SCI, four chip selects and quad timer can be used as General Purpose Input/
Outputs (GPIOs) if its primary function is not required.

4
DSP56853 Preliminary Technical Data
MOTOROLA
1.3 "Best in Class" Development Environment
The SDK (Software Development Kit) provides fully-debugged peripheral drivers, libraries and interfaces
that allow a programmer to create his own unique C application code independent of component
architecture. The CodeWarrior Integrated Development Environment is a sophisticated tool for code
navigation, compiling, and debugging. A complete set of evaluation modules (EVMs) and development
system cards will support concurrent engineering. Together, the SDK, CodeWarrior, and EVMs create a
complete, scalable tools solution for easy, fast and efficient development.
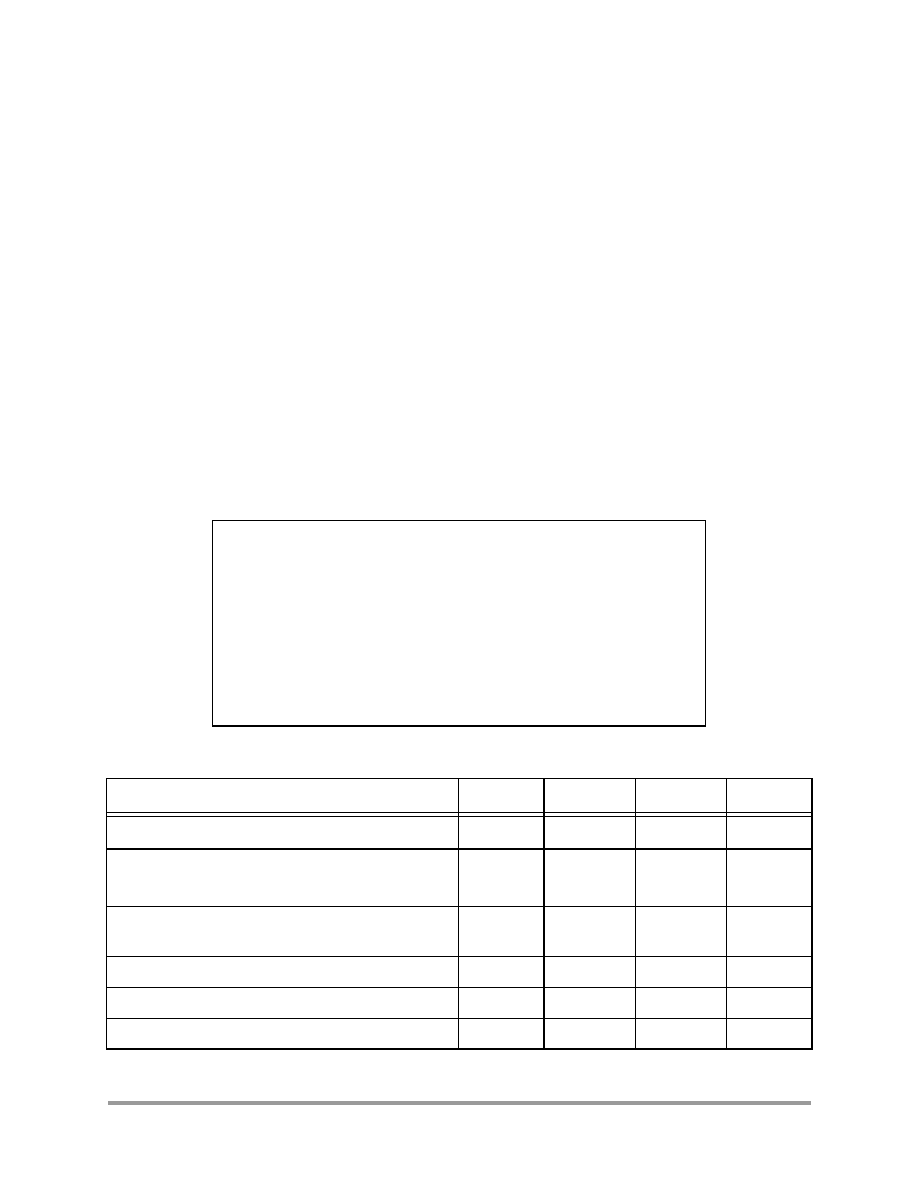
1.4 Product Documentation
The four documents listed in
Table 1
are required for a complete description of and proper design with the
DSP56853. Documentation is available from local Motorola distributors, Motorola semiconductor sales
offices, Motorola Literature Distribution Centers, or online at www.motorola.com/semiconductors/.
Table 1. DSP56853 Chip Documentation
1.5 Data Sheet Conventions
This data sheet uses the following conventions:
Topic
Description
Order Number
DSP56800E
Reference Manual
Detailed description of theDSP56800E architecture,
16-bit DSP core processor and the instruction set
DSP56800ERM/D
DSP56853
User's Manual
Detailed description of memory, peripherals, and
interfaces of the DSP56853
DSP5685xUM/D
DSP56853
Technical Data Sheet
Electrical and timing specifications, pin descriptions,
and package descriptions
DSP56853/D
DSP56853
Product Brief
Summary description and block diagram of the
DSP56853 core, memory, peripherals and interfaces
(this document)
DSP56853PB/D
OVERBAR
This is used to indicate a signal that is active when pulled low. For example, the RESET pin is
active when low.
"asserted"
A high true (active high) signal is high or a low true (active low) signal is low.
"deasserted"
A high true (active high) signal is low or a low true (active low) signal is high.
Examples:
Signal/Symbol
Logic State
Signal State
Voltage
1
1.
Values for VIL, VOL, VIH, and VOH are defined by individual product specifications.
PIN
True
Asserted
V
IL
/V
OL
PIN
False
Deasserted
V
IH
/V
OH
PIN
True
Asserted
V
IH
/V
OH
PIN
False
Deasserted
V
IL
/V
OL

Introduction
MOTOROLA
DSP56853 Preliminary Technical Data
5
Part 2 Signal/Connection Descriptions
2.1 Introduction
The input and output signals of the DSP56853 are organized into functional groups, as shown in
Table 2
and as illustrated in
Figure 2
. In
Table 3
each table row describes the package pin and the signal or signals
present.
1.
V
DD
=
V
DD CORE,
V
SS
=
V
SS CORE,
V
DDIO
=
V
DD IO,
V
SSIO
=
V
SS IO,
V
DDA
=
V
DD ANA,
V
SSA
=
V
SS ANA
2. MODA, MODB and MODC can be used as GPIO after the bootstrap process has completed.
3. The following Host Interface signals are multiplexed: HRWB to HRD, HDS to HWR, HREQ to HTRQ
and HACK to HRRQ.
Table 2. DSP56853 Functional Group Pin Allocations
Functional Group
Number of Pins
Power (V
DD,
V
DDIO, or
V
DDA
)
(6, 11, 1)
1
Ground (V
SS,
V
SSIO,
or V
SSA
)
(6, 10, 1)
1
PLL and Clock
3
External Bus Signals
39
External Chip Select*
4
Interrupt and Program Control
7
2
Host Interface (HI)*
16
3
Enhanced Synchronous Serial Interface (ESSI0) Port*
6
Serial Communications Interface (SCI0) Ports*
2
Serial Communications Interface (SCI1) Ports*
2
Serial Peripheral Interface (SPI) Port*
4
Quad Timer Module Port*
4
JTAG/Enhanced On-Chip Emulation (EOnCE)
6
*Alternately, GPIO pins

6
DSP56853 Preliminary Technical Data
MOTOROLA
.
Figure 2. DSP56853 Signals Identified by Functional Group
2
1. Specifically for PLL, OSC, and POR.
2. Alternate pin functions are shown in parentheses.
DSP56853
Logic
Power
I/O
Power
SCI 0
JTAG /
Enhanced
OnCE
Timer
Module
ESSI 0
SPI
Chip
Select
External
Bus
Analog
Power
1
PLL/Clock
Host
Interface
SCI 2
Interrupt/
Program
Control
V
DD
V
SS
V
DDIO
V
SSIO
V
DDA
V
SSA
A0 - A20
RD
D0 - D15
WR
CS0 - CS3 (GPIOA0 - A3)
HD0 - HD7 (GPIOB0 - B7)
HA0 - HA2 (GPIOB8 - B10)
HRWB (HRD) (GPIOB11)
HDS (HWR) (GPIOB12)
HCS (GPIOB13)
HREQ (HTRQ) (GPIOB14)
HACK (HRRQ) (GPIOB15)
TIO0 - TIO3 (GPIOG0 - G3)
IRQA
IRQB
MODA, MODB, MODC
(GPIOH0 - H2)
RESET
RSTO
Host
Interface
XTAL
RXDO (GPIOE0)
TXDO (GPIOE1)
RXD1 (GPIOE2)
TXD1 (GPIOE3)
STD0 (GPIOC0)
SRD0 (GPIOC1)
SCK0 (GPIOC2)
SC00 (GPIOC3)
SC01 (GPIOC4)
SC02 (GPIOC5)
MISO (GPIOF0)
MOSI (GPIOF1)
SCK (GPIOF2)
SS (GPIOF3)
EXTAL
CLKO
TCK
TDI
TDO
TMS
TRST
DE
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
3
1
1
4
1
1
1
1
1
3
8
4
1
1
16
21
1
1
10
11
6
6

Introduction
MOTOROLA
DSP56853 Preliminary Technical Data
7
Part 3 Signals and Package Information
All digital inputs have a weak internal pull-up circuit associated with them. These pull-up circuits
are enabled by default. Exceptions:
1. When a pin has GPIO functionality, the pull-up may be disabled under software control.
2. MODE A, MODE B and MODE C pins have no pull-up.
3. TCK has a weak pull-down circuit always active.
4. Bidirectional I/O pullups automatically disable when the output is enabled.
This table is presented consistently with the Signals Identified by Functional Group figure.
1. BOLD entries in the Type column represents the state of the pin just out of reset.
2. Ouput(Z) means an output in a High-Z condition
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description
13
V
DD
V
DD
Power (V
DD
)--These pins provide power to the internal
structures of the chip, and should all be attached to V
DD.
47
V
DD
64
V
DD
79
V
DD
80
V
DD
112
V
DD
14
V
SS
V
SS
Ground (V
SS
)--These pins provide grounding for the
internal structures of the chip and should all be attached to
V
SS.
48
V
SS
63
V
SS
81
V
SS
96
V
SS
113
V
SS
5
V
DDIO
V
DDIO
Power (V
DDIO
)--These pins provide power for all I/O and
ESD structures of the chip, and should all be attached to
V
DDIO
(3.3V)
.
18
V
DDIO
41
V
DDIO
55
V
DDIO
61
V
DDIO
72
V
DDIO
91
V
DDIO
92
V
DDIO
100
V
DDIO
114
V
DDIO
124
V
DDIO

8
DSP56853 Preliminary Technical Data
MOTOROLA
6
V
SSIO
V
SSIO
Ground (V
SSIO
)--These pins provide grounding for all I/O
and ESD structures of the chip and should all be attached to
V
SS.
19
V
SSIO
42
V
SSIO
56
V
SSIO
62
V
SSIO
74
V
SSIO
93
V
SSIO
102
V
SSIO
115
V
SSIO
125
V
SSIO
22
V
DDA
V
DDA
Analog Power (V
DDA
)--These pins supply an analog power
source.
23
V
SSA
V
SSA
Analog Ground (V
SSA
)--This pin supplies an analog
ground.
9
A0
Output(Z)
Address Bus (A0-A20)--These signals specify a word
address for external program or data memory access.
10
A1
11
A2
12
A3
26
A4
27
A5
28
A6
29
A7
43
A8
44
A9
45
A10
46
A11
57
A12
58
A13
59
A14
60
A15
67
A16
68
A17
69
A18
70
A19
71
A20
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description

Introduction
MOTOROLA
DSP56853 Preliminary Technical Data
9
73
D0
Input/Output(Z)
Data Bus (D0-D15)--These pins provide the bidirectional data
for external program or data memory accesses.
86
D1
87
D2
88
D3
89
D4
90
D5
107
D6
108
D7
109
D8
110
D9
111
D10
122
D11
123
D12
126
D13
127
D14
128
D15
7
RD
Output
Read Enable (RD) --is asserted during external memory
read cycles.
This signal is pulled high during reset.
8
WR
Output
Write Enable (WR)-- is asserted during external memory
write cycles.
This signal is pulled high during reset.
75
CS0
GPIOA0
Output
Input/Output
External Chip Select (CS0)--This pin is used as a dedicated
GPIO.
Port A GPIO (0) --This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
76
CS1
GPIOA1
Output
Input/Output
External Chip Select (CS1)--This pin is used as a dedicated
GPIO.
Port A GPIO (1) --This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
77
CS2
GPIOA2
Output
Input/Output
External Chip Select (CS2)--This pin is used as a dedicated
GPIO.
Port A GPIO (2) --This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
78
CS3
GPIOA3
Output
Input/Output
External Chip Select (CS3)--This pin is used as a dedicated
GPIO.
Port A GPIO (3)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description

10
DSP56853 Preliminary Technical Data
MOTOROLA
30
HD0
GPIOB0
Input
Input/Output
Host Address (HD0)--This input provides data selection for
HI registers.
This pin is disconnected internally during reset.
Port B GPIO (0)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
31
HD1
GPIOB1
Input
Input/Output
Host Address (HD1)--This input provides data selection for
HI registers.
This pin is disconnected internally during reset.
Port B GPIO (1)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
32
HD2
GPIOB2
Input
Input/Output
Host Address (HD2)--This input provides data selection for
HI registers.
This pin is disconnected internally during reset.
Port B GPIO (2)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
36
HD3
GPIOB3
Input
Input/Output
Host Address (HD3)--This input provides data selection for
HI registers.
This pin is disconnected internally during reset.
Port B GPIO (3)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
37
HD4
GPIOB4
Input
Input/Output
Host Address (HD4)--This input provides data selection for
HI registers.
This pin is disconnected internally during reset.
Port B GPIO (4)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
38
HD5
GPIOB5
Input
Input/Output
Host Address (HD5)--This input provides data selection for
HI registers.
This pin is disconnected internally during reset.
Port B GPIO (5)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
39
HD6
GPIOB6
Input
Input/Output
Host Address (HD6)--This input provides data selection for
HI registers.
This pin is disconnected internally during reset.
Port B GPIO (6)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description

Introduction
MOTOROLA
DSP56853 Preliminary Technical Data
11
40
HD7
GPIOB7
Input
Input/Output
Host Address (HD7)--This input provides data selection for
HI registers.
This pin is disconnected internally during reset.
Port B GPIO (7)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
82
HA0
GPIOB8
Input
Input/Output
Host Address (HA0)--These inputs provide the address
selection for HI registers.
These pins are disconnected internally during reset.
Port B GPIO (8)--These pins are General Purpose I/O
(GPIO) pins when not configured for host port usage.
83
HA1
GPIOB9
Input
Input/Output
Host Address (HA0)--These inputs provide the address
selection for HI registers.
These pins are disconnected internally during reset.
Port B GPIO (9)--These pins are General Purpose I/O
(GPIO) pins when not configured for host port usage.
84
HA2
GPIOB10
Input
Input/Output
Host Address (HA0)--These inputs provide the address
selection for HI registers.
These pins are disconnected internally during reset.
Port B GPIO (10)--These pins are General Purpose I/O
(GPIO) pins when not configured for host port usage.
85
HRWB
HRD
GPIOB11
Input
Input
Input/Output
Host Read/Write (HRWB)--When the HI08 is programmed
to interface to a single-data-strobe host bus and the HI
function is selected, this signal is the Read/Write input.
These pins are disconnected internally.
Host Read Data (HRD)--This signal is the Read Data input
when the HI08 is programmed to interface to a double-data-
strobe host bus and the HI function is selected.
Port B GPIO (11)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
103
HDS
HWR
GPIOB12
Input
Input
Input/Output
Host Data Strobe (HDS)--When the HI08 is programmed to
interface to a single-data-strobe host bus and the HI function
is selected, this input enables a data transfer on the HI when
HCS is asserted.
These pins are disconnected internally.
Host Write Enable (HWR)--This signal is the Write Data
input when the HI08 is programmed to interface to a double-
data-strobe host bus and the HI function is selected.
Port B GPIO (12)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description

12
DSP56853 Preliminary Technical Data
MOTOROLA
104
HCS
GPIOB13
Input
Input/Output
Host Chip Select (HCS)--This input is the chip select input
for the Host Interface.
These pins are disconnected internally.
Port B GPIO (13)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
105
HREQ
HTRQ
GPIOB14
Open Drain
Output
Open Drain
Output
Input/Output
Host Request (HREQ)--When the HI08 is programmed for
HRMS=0 functionality (typically used on a single-data-strobe
bus), this open drain output is used by the HI to request
service from the host processor. The HREQ may be
connected to an interrupt request pin of a host processor, a
transfer request of a DMA controller, or a control input of
external circuitry.
These pins are disconnected internally.
Transmit Host Request (HTRQ)--This signal is the
Transmit Host Request output when the HI08 is programmed
for HRMS=1 functionality and is typically used on a double-
data-strobe bus.
Port B GPIO (14)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
106
HACK
HRRQ
GPIOB15
Input
Open Drain
Output
Input/Output
Host Acknowledge (HACK)--When the HI08 is
programmed for HRMS=0 functionality (typically used on a
single-data-strobe bus), this input has two functions: (1)
provide a Host Acknowledge signal for DMA transfers or (2)
to control handshaking and provide a Host Interrupt
Acknowledge compatible with the MC68000 family
processors.
These pins are disconnected internally.
Receive Host Request (HRRQ)--This signal is the Receive
Host Request output when the HI08 is programmed for
HRMS=1 functionality and is typically used on a double-data-
strobe bus.
Port B GPIO(15)--This pin is a General Purpose I/O (GPIO)
pin when not configured for host port usage.
101
TIO0
GPIOG0
Input/Output
Input/Output
Timer Input/Outputs (TIO0)--This pin can be independently
configured to be either a timer input source or an output flag.
Port G GPIOG0--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as an input or output
pin.
99
TIO1
GPIOG1
Input/Output
Input/Output
Timer Input/Outputs (TIO1)--This pin can be independently
configured to be either a timer input source or an output flag.
Port G GPIO (1)--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as an input or output
pin.
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description

Introduction
MOTOROLA
DSP56853 Preliminary Technical Data
13
98
TIO2
GPIOG2
Input/Output
Input/Output
Timer Input/Outputs (TIO2)--This pin can be independently
configured to be either a timer input source or an output flag.
Port G GPIO (2)--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as an input or output
pin.
97
TIO3
GPIOG3
Input/Output
Input/Output
Timer Input/Outputs (TIO3)--This pin can be independently
configured to be either a timer input source or an output flag.
Port G GPIO (3)--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as an input or output
pin.
20
IRQA
Input
External Interrupt Request A and B--The IRQA and IRQB
inputs are asynchronous external interrupt requests that
indicate that an external device is requesting service. A
Schmitt trigger input is used for noise immunity. They can be
programmed to be level-sensitive or negative-edge-
triggered. If level-sensitive triggering is selected, an external
pull-up resistor is required for Wired-OR operation.
21
IRQB
15
MODA
GPIOH0
Input
Input/Output
Mode Select (MODA)--During the bootstrap process MODA
selects one of the eight bootstrap modes.
Port H GPIO (0)--This pin is a General Purpose I/O (GPIO)
pin after the bootstrap process has completed.
16
MODB
GPIOH1
Input
Input/Output
Mode Select (MODB)--During the bootstrap process MODB
selects one of the eight bootstrap modes.
Port H GPIO (1)--This pin is a General Purpose I/O (GPIO)
pin after the bootstrap process has completed.
17
MODC
GPIOH2
Input
Input/Output
Mode Select (MODC)--During the bootstrap process MODC
selects one of the eight bootstrap modes.
Port H GPIO (2)--This pin is a General Purpose I/O (GPIO)
pin after the bootstrap process has completed.
35
RESET
Input
Reset (RESET)--This input is a direct hardware reset on the
processor. When RESET is asserted low, the DSP is
initialized and placed in the Reset state. A Schmitt trigger
input is used for noise immunity. When the RESET pin is
deasserted, the initial chip operating mode is latched from the
MODA, MODB, and MODC pins.
To ensure complete hardware reset, RESET and TRST
should be asserted together. The only exception occurs in a
debugging environment when a hardware DSP reset is
required and it is necessary not to reset the JTAG/Enhanced
OnCE module. In this case, assert RESET, but do not assert
TRST.
34
RSTO
Output
Reset Output (RSTO)--This output is asserted on any reset
condition (external reset, low voltage, software or COP).
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description

14
DSP56853 Preliminary Technical Data
MOTOROLA
65
RXD0
GPIOE0
Input
Input/Output
Serial Receive Data 0 (RXD0)--This input receives byte-
oriented serial data and transfers it to the SCI 0 receive shift
register.
Port E GPIO (0)--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as input or output
pin.
66
TXD0
GPIOE1
Output(Z)
Input/Output
Serial Transmit Data 0 (TXD0)--This signal transmits data
from the SCI 0 transmit data register.
Port E GPIO (1)--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as input or output
pin.
94
RXD1
GPIOE2
Input
Input/Output
Serial Receive Data 1 (RXD1)--This input receives byte-
oriented serial data and transfers it to the SCI 1 receive shift
register.
Port E GPIO (2)--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as input or output
pin.
95
TXD1
GPIOE3
Output(Z)
Input/Output
Serial Transmit Data 1 (TXD1)--This signal transmits data
from the SCI 1 transmit data register.
Port E GPIO (3)--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as input or output
pin.
116
STD0
GPIOC0
Output
Input/Output
ESSI Transmit Data (STD0)--This output pin transmits
serial data from the ESSI Transmitter Shift Register.
Port C GPIO (0)--This pin is a General Purpose I/O (GPIO)
pin when the ESSI is not in use.
117
SRD0
GPIOC1
Input
Input/Output
ESSI Receive Data (SRD0)--This input pin receives serial
data and transfers the data to the ESSI Receive Shift
Register.
Port C GPIO (1)--This pin is a General Purpose I/O (GPIO)
pin when the ESSI is not in use.
118
SCK0
GPIOC2
Input/Output
Input/Output
ESSI Serial Clock (SCK0)--This bidirectional pin provides
the serial bit rate clock for the transmit section of the ESSI.
The clock signal can be continuous or gated and can be used
by both the transmitter and receiver in synchronous mode.
Port C GPIO (2)--This pin is a General Purpose I/O (GPIO)
pin when the ESSI is not in use.
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description

Introduction
MOTOROLA
DSP56853 Preliminary Technical Data
15
119
SC00
GPIOC3
Input/Output
Input/Output
ESSI Serial Control Pin 0 (SC00)--The function of this pin is
determined by the selection of either synchronous or
asynchronous mode. For asynchronous mode, this pin will be
used for the receive clock I/O. For synchronous mode, this
pin is used either for transmitter1 output or for serial I/O flag
0.
Port C GPIO (3)--This pin is a General Purpose I/O (GPIO)
pin when the ESSI is not in use.
120
SC01
GPIOC4
Input/Output
Input/Output
ESSI Serial Control Pin 1 (SC01)--The function of this pin is
determined by the selection of either synchronous or
asynchronous mode. For asynchronous mode, this pin is the
receiver frame sync I/O. For synchronous mode, this pin is
used either for transmitter2 output or for serial I/O flag 1.
Port C GPIO (4)--This pin is a General Purpose I/O (GPIO)
pin when the ESSI is not in use.
121
SC02
GPIOC5
Input/Output
Input /Output
ESSI Serial Control Pin 2 (SC02)--This pin is used for
frame sync I/O. SC02 is the frame sync for both the
transmitter and receiver in synchronous mode and for the
transmitter only in asynchronous mode. When configured as
an output, this pin is the internally generated frame sync
signal. When configured as an input, this pin receives an
external frame sync signal for the transmitter (and the
receiver in synchronous operation).
Port C GPIO (5)--This pin is a General Purpose I/O (GPIO)
pin when the ESSI is not in use.
1
MISO
GPIOF0
Input/Output
Input/Output
SPI Master In/Slave Out (MISO)--This serial data pin is an
input to a master device and an output from a slave device.
The MISO line of a slave device is placed in the high-
impedance state if the slave device is not selected. The
driver on this pin can be configured as an open-drain driver
by the SPI's Wired-OR mode (WOM) bit when this pin is
configured for SPI operation.
Port F GPIO (0)--This pin is a General Purpose I/O (GPIO)
pin that can be individually programmed as input or output
pin.
2
MOSI
GPIOF1
Input/Output (Z)
Input/Output
SPI Master Out/Slave In (MOSI)--This serial data pin is an
output from a master device and an input to a slave device.
The master device places data on the MOSI line a half-cycle
before the clock edge that the slave device uses to latch the
data. The driver on this pin can be configured as an open-
drain driver by the SPI's WOM bit when this pin is configured
for SPI operation.
Port F GPIO (1)--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as input or output
pin.
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description

16
DSP56853 Preliminary Technical Data
MOTOROLA
3
SCK
GPIOF2
Input/Output
Input/Output
SPI Serial Clock (SCK)--This bidirectional pin provides a
serial bit rate clock for the SPI. This gated clock signal is an
input to a slave device and is generated as an output by a
master device. Slave devices ignore the SCK signal unless
the SS pin is active low. In both master and slave SPI
devices, data is shifted on one edge of the SCK signal and is
sampled on the opposite edge, where data is stable. The
driver on this pin can be configured as an open-drain driver
by the SPI's WOM bit when this pin is configured for SPI
operation. When using Wired-OR mode, the user must
provide an external pull-up device.
Port F GPIO (2)--This pin is a General Purpose I/O (GPIO)
pin that can be individually programmed as input or output
pin.
4
SS
GPIOF3
Input
Input/Output
SPI Slave Select (SS)--This input pin selects a slave device
before a master device can exchange data with the slave
device. SS must be low before data transactions and must
stay low for the duration of the transaction. The SS line of the
master must be held high.
Port F GPIO (3)--This pin is a General Purpose I/O (GPIO)
pin that can individually be programmed as input or output
pin.
24
XTAL
Input/Output
Crystal Oscillator Output (XTAL)--This output connects
the internal crystal oscillator output to an external crystal. If
an external clock source other than a crystal oscillator is
used, XTAL must be used as the input.
25
EXTAL
Input
External Crystal Oscillator Input (EXTAL)--This input
should be connected to an external crystal. If an external
clock source other than a crystal oscillator is used, EXTAL
must be tied off. See
Section 4.5.2
33
CLKO
Output
Clock Output (CLKO)--This pin outputs a buffered clock
signal. When enabled, this signal is the system clock divided
by four.
54
TCK
Input
Test Clock Input (TCK)--This input pin provides a gated
clock to synchronize the test logic and to shift serial data to
the JTAG/Enhanced OnCE port. The pin is connected
internally to a pull-down resistor.
52
TDI
Input
Test Data Input (TDI)--This input pin provides a serial input
data stream to the JTAG/Enhanced OnCE port. It is sampled
on the rising edge of TCK and has an on-chip pull-up resistor.
51
TDO
Output (Z)
Test Data Output (TDO)--This tri-statable output pin
provides a serial output data stream from the JTAG/
Enhanced OnCE port. It is driven in the Shift-IR and Shift-DR
controller states, and changes on the falling edge of TCK.
53
TMS
Input
Test Mode Select Input (TMS)--This input pin is used to
sequence the JTAG TAP controller's state machine. It is
sampled on the rising edge of TCK and has an on-chip pull-
up resistor.
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description

Introduction
MOTOROLA
DSP56853 Preliminary Technical Data
17
50
TRST
Input
Test Reset (TRST)--As an input, a low signal on this pin
provides a reset signal to the JTAG TAP controller. To ensure
complete hardware reset, TRST should be asserted
whenever RESET is asserted. The only exception occurs in a
debugging environment, since the Enhanced OnCE/JTAG
module is under the control of the debugger. In this case it is
not necessary to assert TRST when asserting RESET .
Outside of a debugging environment RESET should be
permanently asserted by grounding the signal, thus disabling
the Enhanced OnCE/JTAG module on the DSP.
49
DE
Input/Output
Debug Event (DE)--This is an open-drain, bidirectional,
active low signal. As an input, it is a means of entering debug
mode of operation from an external command controller. As
an output, it is a means of acknowledging that the chip has
entered debug mode.
This pin is connected internally to a weak pull-up resistor.
Table 3. DSP56853 Signal and Package Information for the 128-pin LQFP
Pin No.
Signal Name
Type
Description
18
DSP56853 Preliminary Technical Data
MOTOROLA
Part 4 Specifications
4.1 General Characteristics
The DSP56853 is fabricated in high-density CMOS with 5-volt tolerant TTL-compatible digital inputs.
The term "5-volt tolerant" refers to the capability of an I/O pin, built on a 3.3V compatible process
technology, to withstand a voltage up to 5.5V without damaging the device. Many systems have a mixture
of devices designed for 3.3V and 5V power supplies. In such systems, a bus may carry both 3.3V and 5V-
compatible I/O voltage levels (a standard 3.3V I/O is designed to receive a maximum voltage of 3.3V
±
10% during normal operation without causing damage). This 5V tolerant capability therefore offers the
power savings of 3.3V I/O levels while being able to receive 5V levels without being damaged.
Absolute maximum ratings given in
Table 4
are stress ratings only, and functional operation at the
maximum is not guaranteed. Stress beyond these ratings may affect device reliability or cause permanent
damage to the device.
The DSP56853 DC/AC electrical specifications are preliminary and are from design simulations. These
specifications may not be fully tested or guaranteed at this early stage of the product life cycle. Finalized
specifications will be published after complete characterization and device qualifications have been
completed.
CAUTION
This device contains protective circuitry to guard
against damage due to high static voltage or
electrical fields. However, normal precautions are
advised to avoid application of any voltages higher
than maximum rated voltages to this high-impedance
circuit. Reliability of operation is enhanced if unused
inputs are tied to an appropriate voltage level.
Table 4. Absolute Maximum Ratings
Characteristic
Symbol
Min
Max
Unit
Supply voltage, core
V
DD
1
1.
V
DD
must not exceed V
DDIO
V
SS
≠ 0.3
V
SS
+ 2.0
V
Supply voltage, IO
Supply voltage, analog
V
DDIO
2
V
DDIO
2
2.
V
DDIO
and V
DDA
must not differ by more that 0.5V
V
SSIO
≠ 0.3
V
SSA
≠ 0.3
V
SSIO
+ 4.0
V
DDA
+ 4.0
V
Digital input voltages
Analog input voltages (XTAL, EXTAL)
V
IN
V
INA
V
SSIO
≠ 0.3
V
SSA
≠ 0.3
V
SSIO
+ 5.5
V
DDA
+ 0.3
V
Current drain per pin excluding V
DD
, GND
I
--
8 mA
Junction temperature
T
J
-40
120
∞C
Storage temperature range
T
STG
-55
150
∞C

General Characteristics
MOTOROLA
DSP56853 Preliminary Technical Data
19
Table 5. Recommended Operating Conditions
Characteristic
Symbol
Min
Max
Unit
Supply voltage for Logic Power
V
DD
1.62
1.98
V
Supply voltage for I/O Power
V
DDIO
3.0
3.6
V
Supply voltage for Analog Power
V
DDA
3.0
3.6
V
Ambient operating temperature
T
A
-40
85
∞C
PLL clock frequency
1
1.
Assumes clock source is direct clock to EXTAL or crystal oscillator running 2-4MHz. PLL must be enabled, locked, and
selected. The actual frequency depends on the source clock frequency and programming of the CGM module.
f
pll
--
240
MHz
Operating Frequency
2
2.
Master clock is derived from on of the following four sources:
f
clk
= f
xtal
when the source clock is the direct clock to EXTAL
f
clk
= f
pll
when PLL is selected
f
clk
= f
osc
when the source clock is the crystal oscillator and PLL is not selected
f
clk
= f
extal
when the source clock is the direct clock to EXTAL and PLL is not selected
f
op
--
120
MHz
Frequency of peripheral bus
f
ipb
--
60
MHz
Frequency of external clock
f
clk
--
240
MHz
Frequency of oscillator
f
osc
2
4
MHz
Frequency of clock via XTAL
f
xtal
--
240
MHz
Frequency of clock via EXTAL
f
extal
2
4
MHz
Table 6. Thermal Characteristics
1
1.
See
Section 6.1
for more detail.
Characteristic
128-pin LQFP
Symbol
Value
Unit
Thermal resistance junction-to-ambient
(estimated)
JA
43.1
∞C/W
I/O pin power dissipation
P
I/O
User Determined
W
Power dissipation
P
D
P
D
= (I
DD
◊
V
DD
) + P
I/O
W
Maximum allowed P
D
P
DMAX
(T
J
≠ T
A
) /
JA
∞
C

20
DSP56853 Preliminary Technical Data
MOTOROLA
4.2 DC Electrical Characteristics
Table 7. DC Electrical Characteristics
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
Characteristic
Symbol
Min
Typ
Max
Unit
Input high voltage (XTAL/EXTAL)
V
IHC
V
DDA
≠ 0.8
V
DDA
V
DDA
+ 0.3
V
Input low voltage (XTAL/EXTAL)
V
ILC
-0.3
--
0.5
V
Input high voltage
V
IH
2.0
--
5.5
V
Input low voltage
V
IL
-0.3
--
0.8
V
Input current low (pullups disabled)
I
IL
-1
--
1
µ
A
Input current high (pullups disabled)
I
IH
-1
--
1
µ
A
Output tri-state current low
I
OZL
-10
--
10
µ
A
Output tri-state current high
I
OZH
-10
--
10
µ
A
Output High Voltage
V
OH
V
DD
≠ 0.7
--
--
V
Output Low Voltage
V
OL
--
--
0.4
V
Output High Current
I
OH
8
--
16
mA
Output Low Current
I
OL
8
--
16
mA
Input capacitance
C
IN
--
8
--
pF
Output capacitance
C
OUT
--
12
--
pF
V
DD
supply current @ nominal voltage and 25
∞
C
Run
1
Deep Stop
2
Light Stop
3
1.
Run (operating) I
DD
measured using external square wave clock source (f
osc
= 4MHz) into XTAL. All inputs 0.2V from
rail; no DC loads; outputs unloaded. All ports configured as inputs; measured with all modules enabled. PLL set to 240MHz
out. Running Core, performing 50% NOP and 50% FIR. Clock at 120 MHz.
I
DD
4
--
--
--
70
100
2.6
--
--
--
mA
µ
A
mA
V
DDIO
supply current @ nominal voltage and 25
∞
C
Run
5
I
DDIO
--
40
--
mA
V
DDA
supply current @ nominal voltage and 25
∞
C
Deep Stop
2
I
DDA
--
60
--
µ
A
Low Voltage Interrupt
6
V
EI
--
2.5
2.85
V
Low Voltage Interrupt Recovery Hysteresis
V
EIH
--
50
--
mV
Power on Reset
7
POR
--
1.5
2.0
V

Supply Voltage Sequencing and Separation Cautions
MOTOROLA
DSP56853 Preliminary Technical Data
21
4.3 Supply Voltage Sequencing and Separation Cautions
Figure 1
shows two situations to avoid in sequencing the V
DD
and V
DDIO,
V
DDA
supplies.
Notes: 1. V
DD
rising before V
DDIO
, V
DDA
2. V
DDIO
, V
DDA
rising much faster than V
DD
Figure 3. Supply Voltage Sequencing and Separation Cautions
V
DD
should not be allowed to rise early (1). This is usually avoided by running the regulator for the V
DD
supply (1.8V) from the voltage generated by the 3.3V V
DDIO
supply, see
Figure 2
. This keeps V
DD
from
rising faster than V
DDIO
.
V
DD
should not rise so late that a large voltage difference is allowed between the two supplies (2). Typically
this situation is avoided by using external discrete diodes in series between supplies, as shown in
Figure 2
.
The series diodes forward bias when the difference between V
DDIO
and V
DD
reaches approximately 2.1,
causing V
DD
to rise as V
DDIO
ramps up. When the V
DD
regulator begins proper operation, the difference
between supplies will typically be 0.8V and conduction through the diode chain reduces to essentially
leakage current. During supply sequencing, the following general relationship should be adhered to:
V
DDIO
> V
DD
> (V
DDIO
- 2.1V)
In practice, V
DDA
is typically connected directly to V
DDIO
with some filtering.
2.
Deep Stop Mode - Operation frequency = 4 MHz, PLL set to 4 MHz, crystal oscillator and time of day module operat-
ing.
3.
Light Stop Mode - Operation frequency = 120 MHz, PLL set to 240 MHz, crystal oscillator and time of day module
operating.
4.
I
DD
includes current for core logic, internal memories, and all internal peripheral logic circuitry.
5.
Running core and performing external memory access. Clock at 120 MHz.
6.
When V
DD
drops below V
EI
max value, an interrupt is generated.
7.
Power-on reset occurs whenever the digital supply drops below 1.8V. While power is ramping up, this signal remains
active for as long as the internal 2.5V is below 1.8V no matter how long the ramp up rate is. The internally regulated voltage
is typically 100 mV less than V
DD
during ramp up until 2.5V is reached, at which time it self-regulates.
3.3V
1.8V
Time
0
2
1
Supplies Stable
V
DD
V
DDIO,
V
DDA
D
C
P
o
wer
Suppl
y V
o
l
t
a
g
e

22
DSP56853 Preliminary Technical Data
MOTOROLA
Figure 4. Example Circuit to Control Supply Sequencing
4.4 AC Electrical Characteristics
Timing waveforms in
Section 4.2
are tested with a V
IL
maximum of 0.8 V and a V
IH
minimum of 2.0 V for
all pins except XTAL, which is tested using the input levels in
Section 4.2
. In
Figure 5
the levels of V
IH
and V
IL
for an input signal are shown.
Figure 5. Input Signal Measurement References
Figure 6
shows the definitions of the following signal states:
∑
Active state, when a bus or signal is driven, and enters a low impedance state.
∑
Tri-stated, when a bus or signal is placed in a high impedance state.
∑
Data Valid state, when a signal level has reached V
OL
or V
OH.
∑
Data Invalid state, when a signal level is in transition between V
OL
and V
OH.
Figure 6. Signal States
3.3V
Regulator
1.8V
Regulator
Supply
V
DD
V
DDIO,
V
DDA
V
IH
V
IL
Fall Time
Input Signal
Note: The midpoint is V
IL
+ (V
IH
≠ V
IL
)/2.
Midpoint1
Low
High
90%
50%
10%
Rise Time
Data Invalid State
Data1
Data2 Valid
Data
Tri-stated
Data3 Valid
Data2
Data3
Data1 Valid
Data Active
Data Active

External Clock Operation
MOTOROLA
DSP56853 Preliminary Technical Data
23
4.5 External Clock Operation
The DSP56853 system clock can be derived from a crystal or an external system clock signal. To generate
a reference frequency using the internal oscillator, a reference crystal must be connected between the
EXTAL and XTAL pins.
4.5.1
Crystal Oscillator
The internal oscillator is designed to interface with a parallel-resonant crystal resonator in the frequency
range specified for the external crystal in
Table 9
. In
Figure 7
a typical crystal oscillator circuit is shown.
Follow the crystal supplier's recommendations when selecting a crystal, because crystal parameters
determine the component values required to provide maximum stability and reliable start-up. The crystal
and associated components should be mounted as close as possible to the EXTAL and XTAL pins to
minimize output distortion and start-up stabilization time.
Figure 7. Crystal Oscillator
4.5.2
High Speed External Clock Source (> 4MHz)
The recommended method of connecting an external clock is given in
Figure 8
. The external clock source
is connected to XTAL and the EXTAL pin is held at ground, V
DDA
, or V
DDA
/2. The TOD_SEL bit in
CGM must be set to 0.
Figure 8. Connecting a High Speed External Clock Signal using XTAL
4.5.3
Low Speed External Clock Source (2-4MHz)
The recommended method of connecting an external clock is given in
Figure 9
. The external clock source
is connected to XTAL and the EXTAL pin is held at V
DDA
/2. The TOD_SEL bit in CGM must be set to 0.
Sample External Crystal Parameters:
R
z
= 10M
TOD_SEL bit in CGM must be set to 0
Crystal Frequency = 2≠4 MHz (optimized for 4MHz)
EXTAL XTAL
R
z
DSP56853
XTAL
EXTAL
External
GND,
V
DDA
,
Clock
(up to 240MHz)
or V
DDA
/2

24
DSP56853 Preliminary Technical Data
MOTOROLA
Figure 9. Connecting a Low Speed External Clock Signal using XTAL
Figure 10. External Clock Timing
Table 8. External Clock Operation Timing Requirements
4
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
Characteristic
Symbol
Min
Typ
Max
Unit
Frequency of operation (external clock driver)
1
1.
See
Figure 8
for details on using the recommended connection of an external clock driver.
f
osc
0
--
240
MHz
Clock Pulse Width
4
t
PW
6.25
--
--
ns
External clock input rise time
2, 4
2.
External clock input rise time is measured from 10% to 90%.
t
rise
--
--
TBD
ns
External clock input fall time
3,
4
3.
External clock input fall time is measured from 90% to 10%.
4.
Parameters listed are guaranteed by design.
t
fall
--
--
TBD
ns
Table 9. PLL Timing
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
Characteristic
Symbol
Min
Typ
Max
Unit
External reference crystal frequency for the PLL
1
1.
An externally supplied reference clock should be as free as possible from any phase jitter for the PLL to work correctly.
The PLL is optimized for 4MHz input crystal.
f
osc
2
4
4
MHz
PLL output frequency
f
clk
40
--
240
MHz
PLL stabilization time
2
2.
This is the minimum time required after the PLL setup is changed to ensure reliable operation.
t
plls
--
1
10
ms
DSP56853
XTAL
EXTAL
External
Clock
(2-4MHz)
V
DDA
/2
External
Clock
V
IH
V
IL
Note: The midpoint is V
IL
+ (V
IH
≠ V
IL
)/2.
90%
50%
10%
90%
50%
10%
t
PW
t
PW
t
fall
t
rise

External Memory InterfaceTiming
MOTOROLA
DSP56853 Preliminary Technical Data
25
4.6 External Memory InterfaceTiming
The External Memory Interface is designed to access static memory and peripheral devices.
Figure 11
shows sample timing and parameters that are detailed in
Table 10
.
The timing of each parameter consists of both a fixed delay portion and a clock related portion; as well as
user controlled wait states. The equation:
t = D + P * (M + W)
should be used to determine the actual time of each parameter. The terms in the above equation are
defined as:
t
parameter delay time
D
fixed portion of the delay, due to on-chip path delays.
P
the period of the system clock, which determines the execution rate of the part (i.e. when the
device is operating at 120 MHz, P = 8.33 ns).
M Fixed portion of a clock period inherent in the design. This number is adjusted to account for
possible clock duty cycle derating.
W the sum of the applicable wait state controls. See the "Wait State Controls" column of
Table 10
for the applicable controls for each parameter. See the EMI chapter of the 83x
Peripheral Manual for details of what each wait state field controls.
Some of the parameters contain two sets of numbers. These parameters have two different paths and clock
edges that must be considered. Check both sets of numbers and use the smaller result. The appropriate entry
may change if the operating frequency of the part changes.
The timing of write cycles is different when WWS = 0 than when WWS > 0. Therefore, some parameters
contain two sets of numbers to account for this difference. The "Wait States Configuration" column of
Table 10
should be used to make the appropriate selection.
Figure 11. External Memory Interface Timing
t
DRD
t
RDD
t
AD
t
DOH
t
DOS
t
DWR
t
RDWR
t
WAC
t
WRRD
t
WR
t
AWR
t
WRWR
t
ARDD
t
RDA
t
RDRD
t
RD
t
ARDA
Data Out
Data In
A0-Axx,CS
RD
WR
D0-D15
Note: During read-modify-write instructions and internal instructions, the address lines do not change state.

26
DSP56853 Preliminary Technical Data
MOTOROLA
Table 10. External Memory Interface Timing
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98 V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞ to +120∞C, C
L
50pF, P = 8.333ns
Characteristic
Symbol
Wait States
Configuration
D
M
Wait States
Controls
Unit
Address Valid to WR Asserted
t
AWR
WWS=0 -0.79
0.50
WWSS
ns
WWS>0
-1.98
0.69
WR Width Asserted to WR
Deasserted
t
WR
WWS=0 -0.86
0.19
WWS
ns
WWS>0
-0.01
0.00
Data Out Valid to WR Asserted
t
DWR
WWS=0
-1.52
0.00
WWSS
ns
WWS=0 -
5.69
0.25
WWS>0
-2.10
0.19
WWS>0
-4.66
0.50
Valid Data Out Hold Time after WR
Deasserted
t
DOH
-1.47
0.25
WWSH
ns
Valid Data Out Set Up Time to WR
Deasserted
t
DOS
-2.36
0.19
WWS,WWSS
ns
-4.67
0.50
Valid Address after WR
Deasserted
t
WAC
-1.60
0.25
WWSH
RD Deasserted to Address Invalid
t
RDA
- 0.44
0.00
RWSH
ns
Address Valid to RD Deasserted
t
ARDD
-2.07
1.00
RWSS,RWS
ns
Valid Input Data Hold after RD
Deasserted
t
DRD
0.00
N/A
1
1.
N/A since device captures data before it deasserts RD
--
ns
RD Assertion Width
t
RD
-1.34
1.00
RWS
ns
Address Valid to Input Data Valid
t
AD
-10.27
1.00
RWSS,RWS
ns
-13.5
1.19
Address Valid to RD Asserted
t
ARDA
- 0.94
0.00
RWSS
ns
RD Asserted to Input Data Valid
t
RDD
-9.53
1.00
RWSS,RWS
ns
-12.64
1.19
WR Deasserted to RD Asserted
t
WRRD
-0.75
0.25
WWSH,RWSS
ns
RD Deasserted to RD Asserted
t
RDRD
-0.16
2
2.
If RWSS = RWSH = 0, RD does not deassert during back-to-back reads and D=0.00 should be used.
0.00
RWSS,RWSH
ns
WR Deasserted to WR Asserted
t
WRWR
WWS=0
-0.44
0.75
WWSS, WWSH
ns
WWS>0
-0.11
1.00
RD Deasserted to WR Asserted
t
RDWR
0.14
0.50
MDAR, BMDAR,
RWSH, WWSS
ns
-0.57
0.69

Reset, Stop, Wait, Mode Select, and Interrupt Timing
MOTOROLA
DSP56853 Preliminary Technical Data
27
4.7 Reset, Stop, Wait, Mode Select, and Interrupt Timing
Table 11. Reset, Stop, Wait, Mode Select, and Interrupt Timing
1, 2
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
1.
In the formulas, T = clock cycle. For f
op
= 120MHz operation and f
ipb
= 60MHz, T = 8.33ns.
2.
Parameters listed are guaranteed by design.
Characteristic
Symbol
Min
Max
Unit
See
Figure
RESET Assertion to Address, Data and Control
Signals High Impedance
t
RAZ
--
11
ns
Figure 12
Minimum RESET Assertion Duration
3
3.
At reset, the PLL is disabled and bypassed. The part is then put into Run mode and t
clk
assumes the period of the source
clock, t
xtal
, t
extal
or t
osc
.
t
RA
30
--
ns
Figure 12
RESET Deassertion to First External Address Output
t
RDA
--
120T
ns
Figure 12
Edge-sensitive Interrupt Request Width
t
IRW
1T + 3
--
ns
Figure 13
IRQA, IRQB Assertion to External Data Memory
Access Out Valid, caused by first instruction execution
in the interrupt service routine
t
IDM
--
18T
ns
Figure 14
IRQA, IRQB Assertion to General Purpose Output
Valid, caused by first instruction execution in the
interrupt service routine
t
IG
--
18T
ns
Figure 14
IRQA Low to First Valid Interrupt Vector Address Out
recovery from Wait State
4
4.
The minimum is specified for the duration of an edge-sensitive IRQA interrupt required to recover from the Wait state.
This is not the minimum required so that the IRQA interrupt is accepted.
t
IRI
--
13T
ns
Figure 15
IRQA Width Assertion to Recover from Stop State
5
Fast
6
Normal
7, 8
5.
This interrupt instruction fetch is visible on the pins only in Mode 3.
6.
Fast stop mode:
Fast stop recovery applies when fast stop mode recovery is requested (OMR bit 6 is set to 1). The PLL and the master
clock are unaffected by stop mode entry. Recovery takes one less cycle and t
clk
will continue with the same value it had before
stop mode was entered.
7.
Normal stop mode:
As a power saving feature, normal stop mode disables and bypasses the PLL. Stop mode will then shut down the master
clock, recovery will take an extra cycle (to restart the clock), and t
clk
will resume at the input clock source rate.
8.
ET = External Clock period; for an external crystal frequency of 4MHz, ET=250ns.
t
IW
4T
8ET
--
--
ns
ns
Figure 16
Delay from IRQA Assertion to Fetch of first instruction
(exiting Stop)
Fast
5
Normal
6,7
t
IF
--
--
13T
25ET
ns
ns
Figure 16
RSTO pulse width
7
normal operation
internal reset mode
t
RSTO
128ET
8ET
--
--
--
--
Figure 17

28
DSP56853 Preliminary Technical Data
MOTOROLA
Figure 12. Asynchronous Reset Timing
Figure 13. External Interrupt Timing (Negative-Edge-Sensitive)
Figure 14. External Level-Sensitive Interrupt Timing
Figure 15. Interrupt from Wait State Timing
First Fetch
A0≠A20,
D0≠D15
CS,
RD, WR
RESET
First Fetch
t
RDA
t
RA
t
RAZ
IRQA
IRQB
t
IRW
A0≠A20,
CS,
RD
,
WR
IRQA,
IRQB
First Interrupt Instruction Execution
a) First Interrupt Instruction Execution
Purpose
I/O Pin
IRQA,
IRQB
b) General Purpose I/O
t
IG
t
IDM
General
Instruction Fetch
IRQA,
IRQB
First Interrupt Vector
A0≠A20,
CS,
RD, WR
t
IRI

Host Interface Port
MOTOROLA
DSP56853 Preliminary Technical Data
29
Figure 16. Recovery from Stop State Using Asynchronous Interrupt Timing
Figure 17. Reset Output Timing
4.8 Host Interface Port
Table 12. Host Interface Port Timing
1
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
1.
The formulas: T = clock cycle. f ipb = 60MHz, T = 16.7ns.
Characteristic
Symbol
Min
Max
Unit
See Figure
Access time
TACKDV
--
13
ns
Figure 18
Disable time
TACKDZ
3
--
ns
Figure 18
Time to disassert
TACKREQH
3.5
9
ns
Figure 18
Figure 21
Lead time
TREQACKL
0
--
ns
Figure 18
Figure 21
Access time
TRADV
--
13
ns
Figure 19
Figure 20
Disable time
TRADX
5
--
ns
Figure 19
Figure 20
Disable time
TRADZ
3
--
ns
Figure 19
Figure 20
Setup time
TDACKS
3
--
ns
Figure 21
Hold time
TACKDH
1
--
ns
Figure 21
Setup time
TADSS
3
--
ns
Figure 22
Figure 23
Hold time
TDSAH
1
--
ns
Figure 22
Figure 23
Pulse width
TWDS
5
--
ns
Figure 22
Figure 23
Time to re-assert
1. After second write in 16-bit mode
2. After first write in 16-bit mode or after write in 8-bit mode
TACKREQL
4T + 5
5
5T + 9
13
ns
ns
Figure 18
,
Figure 21
Not IRQA Interrupt Vector
IRQA
A0≠A20,
CS,
RD, WR
First Instruction Fetch
t
IW
t
IF
RESET
t
RSTO

30
DSP56853 Preliminary Technical Data
MOTOROLA
Figure 18. DSP-to-Host DMA Read Mode
Figure 19. Single Strobe Read Mode
Figure 20. Dual Strobe Read Mode
HACK
HD
HREQ
TACKDV
TACKDZ
TREQACKL
TACKREQL
TACKREQH
TRADV
TRADZ
TRADX
HA
HCS
HDS
HD
HRW
TRADV
TRADZ
TRADX
HA
HCS
HWR
HD
HRD

Host Interface Port
MOTOROLA
DSP56853 Preliminary Technical Data
31
Figure 21. Host-to-DSP DMA Write Mode
Figure 22. Single Strobe Write Mode
Figure 23. Dual Strobe Write Mode
HACK
HREQ
HD
TDACKS
TACKDH
TREQACKL
TACKREQL
TACKREQH
HA
HCS
HDS
HD
HRW
TADSS
TADSS
TDSAH
TDSAH
TWDS
TDSAH
HA
HCS
HWR
HD
HRD
TWDS
TADSS
TADSS
TDSAH

32
DSP56853 Preliminary Technical Data
MOTOROLA
4.9 Serial Peripheral Interface (SPI) Timing
1. Parameters listed are guaranteed by design.
Table 13. SPI Timing
1
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
Characteristic
Symbol
Min
Max
Unit
See
Figure
Cycle time
Master
Slave
t
C
25
25
--
--
ns
ns
Figures
24
,
25
,
26
,
27
Enable lead time
Master
Slave
t
ELD
--
12.5
--
--
ns
ns
Figure
27
Enable lag time
Master
Slave
t
ELG
--
12.5
--
--
ns
ns
Figure
27
Clock (SCLK) high time
Master
Slave
t
CH
9
12.5
--
--
ns
ns
Figures
24
,
25
,
26
,
27
Clock (SCLK) low time
Master
Slave
t
CL
12
12.5
--
--
ns
ns
Figure
27
Data set-up time required for inputs
Master
Slave
t
DS
10
2
--
--
ns
ns
Figures
24
,
25
,
26
,
27
Data hold time required for inputs
Master
Slave
t
DH
0
2
--
--
ns
ns
Figures
24
,
25
,
26
,
27
Access time (time to data active from high-impedance state)
Slave
t
A
5
15
ns
ns
Figure
27
Disable time (hold time to high-impedance state)
Slave
t
D
2
9
ns
ns
Figure
27
Data valid for outputs
Master
Slave (after enable edge)
t
DV
--
--
2
14
ns
ns
Figures
24
,
25
,
26
,
27
Data invalid
Master
Slave
t
DI
0
0
--
--
ns
ns
Figures
24
,
25
,
26
,
27
Rise time
Master
Slave
t
R
--
--
11.5
10.0
ns
ns
Figures
24
,
25
,
26
,
27
Fall time
Master
Slave
t
F
--
--
9.7
9.0
ns
ns
Figures
24
,
25
,
26
,
27

Serial Peripheral Interface (SPI) Timing
MOTOROLA
DSP56853 Preliminary Technical Data
33
Figure 24. SPI Master Timing (CPHA = 0)
Figure 25. SPI Master Timing (CPHA = 1)
SCLK (CPOL = 0)
(Output)
SCLK (CPOL = 1)
(Output)
MISO
(Input)
MOSI
(Output)
MSB in
Bits 14≠1
LSB in
Master MSB out
Bits 14≠1
Master LSB out
SS
(Input)
SS is held High on master
t
C
t
R
t
F
t
CH
t
CL
t
F
t
R
t
CH
t
CH
t
DV
t
DH
t
DS
t
DI
t
DI
(ref)
t
F
t
R
t
CL
SCLK (CPOL = 0)
(Output)
SCLK (CPOL = 1)
(Output)
MISO
(Input)
MOSI
(Output)
MSB in
Bits 14≠1
LSB in
Master MSB out
Bits 14≠ 1
Master LSB out
SS
(Input)
SS is held High on master
t
R
t
F
t
C
t
CH
t
CL
t
CH
t
CL
t
F
t
DS
t
DH
t
R
t
DI
t
DV
(ref)
t
DV
t
F
t
R

34
DSP56853 Preliminary Technical Data
MOTOROLA
Figure 26. SPI Slave Timing (CPHA = 0)
Figure 27. SPI Slave Timing (CPHA = 1)
SCLK (CPOL = 0)
(Input)
SCLK (CPOL = 1)
(Input)
MISO
(Output)
MOSI
(Input)
Slave MSB out
Bits 14≠1
MSB in
Bits 14≠1
LSB in
SS
(Input)
Slave LSB out
t
DS
t
CL
t
CL
t
DI
t
DI
t
CH
t
CH
t
R
t
R
t
ELG
t
DH
t
ELD
t
C
t
F
t
F
t
D
t
A
t
DV
SCLK (CPOL = 0)
(Input)
SCLK (CPOL = 1)
(Input)
MISO
(Output)
MOSI
(Input)
Slave MSB out
Bits 14≠1
MSB in
Bits 14≠1
LSB in
SS
(Input)
Slave LSB out
t
ELG
t
DI
t
DS
t
DH
t
ELD
t
C
t
CL
t
CH
t
R
t
F
t
F
t
CL
t
CH
t
DV
t
A
t
DV
t
R
t
D

Quad Timer Timing
MOTOROLA
DSP56853 Preliminary Technical Data
35
4.10 Quad Timer Timing
Figure 28. Timer Timing
4.11 Enhanced Synchronous Serial Interface (ESSI) Timing
Table 14. Quad Timer Timing
1, 2
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
1.
In the formulas listed, T = clock cycle. For f
op
= 120MHz operation and fipb = 60MHz, T = 8.33ns.
2.
Parameters listed are guaranteed by design.
Characteristic
Symbol
Min
Max
Unit
Timer input period
P
IN
2T + 3
--
ns
Timer input high/low period
P
INHL
1T + 3
--
ns
Timer output period
P
OUT
2T - 3
--
ns
Timer output high/low period
P
OUTHL
1T - 3
--
ns
Table 15. ESSI Master Mode
1
Switching Characteristics
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
Parameter
Symbol
Min
Typ
Max
Units
SCK frequency
fs
--
--
15
2
MHz
SCK period
3
t
SCKW
66.7
--
--
ns
SCK high time
t
SCKH
33.4
4
--
--
ns
SCK low time
t
SCKL
33.4
4
--
--
ns
Output clock rise/fall time
--
--
4
--
ns
Delay from SCK high to SC2 (bl) high - Master
5
t
TFSBHM
-1.0
--
1.0
ns
Delay from SCK high to SC2 (wl) high - Master
5
t
TFSWHM
-1.0
--
1.0
ns
Delay from SC0 high to SC1 (bl) high - Master
5
t
RFSBHM
-1.0
--
1.0
ns
Delay from SC0 high to SC1 (wl) high - Master
5
t
RFSWHM
-1.0
--
1.0
ns
Delay from SCK high to SC2 (bl) low - Master
5
t
TFSBLM
-1.0
--
1.0
ns
Timer Inputs
Timer Outputs
P
INHL
P
INHL
P
IN
P
OUTHL
P
OUTHL
P
OUT
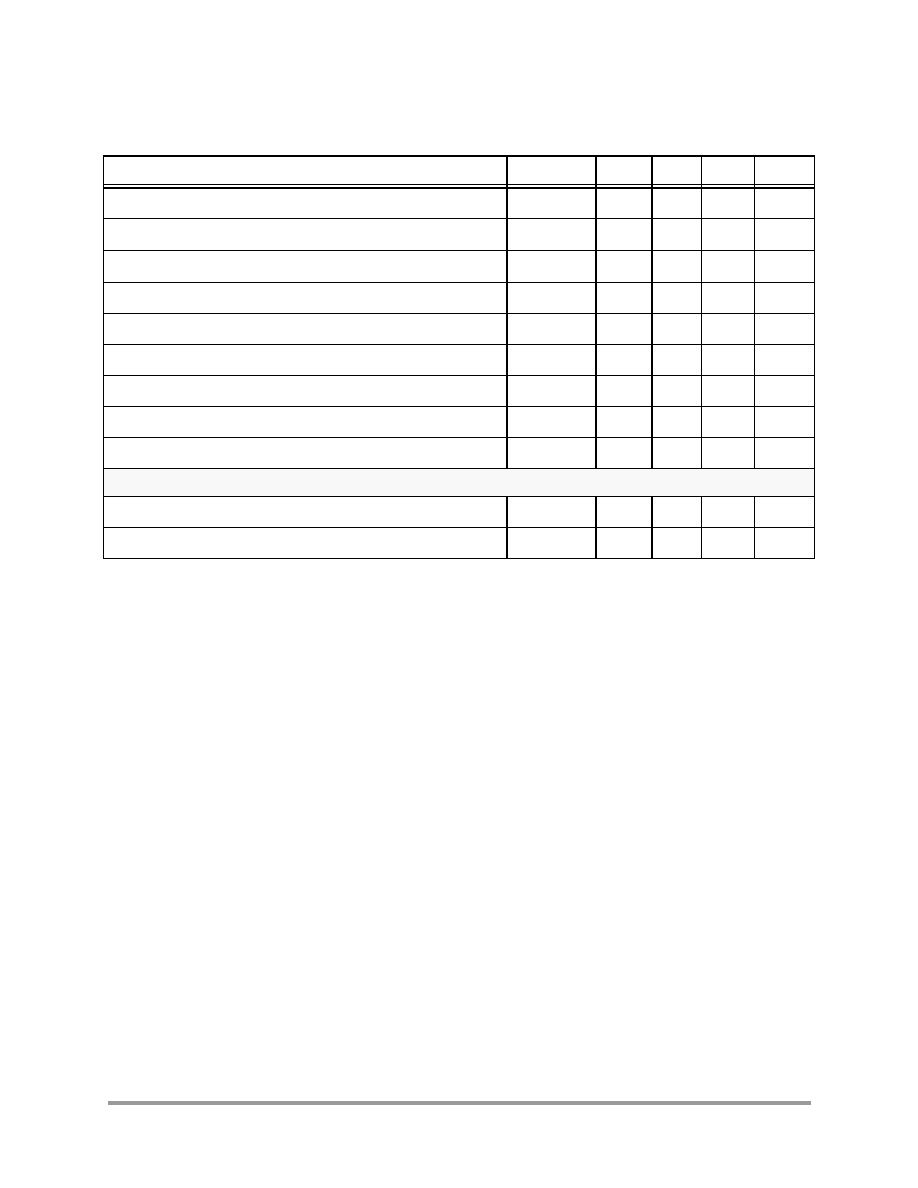
36
DSP56853 Preliminary Technical Data
MOTOROLA
Delay from SCK high to SC2 (wl) low - Master
5
t
TFSWLM
-1.0
--
1.0
ns
Delay from SC0 high to SC1 (bl) low - Master
5
t
RFSBLM
-1.0
--
1.0
ns
Delay from SC0 high to SC1 (wl) low - Master
5
t
RFSWLM
-1.0
--
1.0
ns
SCK high to STD enable from high impedance - Master
t
TXEM
-0.1
--
2
ns
SCK high to STD valid - Master
t
TXVM
-0.1
--
2
ns
SCK high to STD not valid - Master
t
TXNVM
-0.1
--
--
ns
SCK high to STD high impedance - Master
t
TXHIM
-4
--
0
ns
SRD Setup time before SC0 low - Master
t
SM
4
--
--
ns
SRD Hold time after SC0 low - Master
t
HM
4
--
--
ns
Synchronous Operation (in addition to standard internal clock parameters)
SRD Setup time before SCK low - Master
t
TSM
4
--
--
ns
SRD Hold time after SCK low - Master
t
THM
4
--
--
ns
1. Master mode is internally generated clocks and frame syncs
2. Max clock frequency is IP_clk/4 = 60MHz / 4 = 15MHz for an 120MHz part.
3. All the timings for the ESSI are given for a non-inverted serial clock polarity (TSCKP=0 in SCR2 and RSCKP=0 in SCSR)
and a non-inverted frame sync (TFSI=0 in SCR2 and RFSI=0 in SCSR). If the polarity of the clock and/or the frame sync
have been inverted, all the timings remain valid by inverting the clock signal SCK/SC0 and/or the frame sync SC2/SC1 in
the tables and in the figures.
4. 50 percent duty cycle
5. bl = bit length; wl = word length
Table 15. ESSI Master Mode
1
Switching Characteristics (Continued)
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
Parameter
Symbol
Min
Typ
Max
Units

Enhanced Synchronous Serial Interface (ESSI) Timing
MOTOROLA
DSP56853 Preliminary Technical Data
37
Figure 29. Master Mode Timing Diagram
Table 16: ESSI Slave Mode
1
Switching Characteristics
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
Parameter
Symbol
Min
Typ
Max
Units
SCK frequency
fs
--
--
15
2
MHz
SCK period
3
t
SCKW
66.7
--
--
ns
SCK high time
t
SCKH
33.4
4
--
--
ns
SCK low time
t
SCKL
33.4
4
--
--
ns
Output clock rise/fall time
--
--
4
--
ns
Delay from SCK high to SC2 (bl) high - Slave
5
t
TFSBHS
-1
--
29
ns
Delay from SCK high to SC2 (wl) high - Slave
5
t
TFSWHS
-1
--
29
ns
t
THM
t
TSM
t
HM
t
SM
t
RFSWLM
t
RFSWHM
t
RFBLM
t
RFSBHM
t
TXHIM
t
TXNVM
t
TXVM
t
TXEM
t
TFSWLM
t
TFSWHM
t
TFSBLM
t
TFSBHM
t
SCKL
t
SCKW
t
SCKH
First Bit
Last Bit
SCK output
SC2 (bl) output
SC2 (wl) output
STD
SC0 output
SC1 (bl) output
SC1 (wl) output
SRD

38
DSP56853 Preliminary Technical Data
MOTOROLA
Delay from SC0 high to SC1 (bl) high - Slave
5
t
RFSBHS
-1
--
29
ns
Delay from SC0 high to SC1 (wl) high - Slave
5
t
RFSWHS
-1
--
29
ns
Delay from SCK high to SC2 (bl) low - Slave
5
t
TFSBLS
-29
--
29
ns
Delay from SCK high to SC2 (wl) low - Slave
5
t
TFSWLS
-29
--
29
ns
Delay from SC0 high to SC1 (bl) low - Slave
5
t
RFSBLS
-29
--
29
ns
Delay from SC0 high to SC1 (wl) low - Slave
5
t
RFSWLS
-29
--
29
ns
SCK high to STD enable from high impedance - Slave
t
TXES
--
--
15
ns
SCK high to STD valid - Slave
t
TXVS
4
--
15
ns
SC2 high to STD enable from high impedance (first bit) - Slave
t
FTXES
4
--
15
ns
SC2 high to STD valid (first bit) - Slave
t
FTXVS
4
--
15
ns
SCK high to STD not valid - Slave
t
TXNVS
4
--
15
ns
SCK high to STD high impedance - Slave
t
TXHIS
4
--
15
ns
SRD Setup time before SC0 low - Slave
t
SS
4
--
--
ns
SRD Hold time after SC0 low - Slave
t
HS
4
--
--
ns
Synchronous Operation (in addition to standard external clock parameters)
SRD Setup time before SCK low - Slave
t
TSS
4
--
--
ns
SRD Hold time after SCK low - Slave
t
THS
4
--
--
ns
1. Slave mode is externally generated clocks and frame syncs
2. Max clock frequency is IP_clk/4 = 60MHz / 4 = 15MHz for a 120MHz part.
3. All the timings for the ESSI are given for a non-inverted serial clock polarity (TSCKP=0 in SCR2 and RSCKP=0 in SCSR)
and a non-inverted frame sync (TFSI=0 in SCR2 and RFSI=0 in SCSR). If the polarity of the clock and/or the frame sync
have been inverted, all the timings remain valid by inverting the clock signal SCK/SC0 and/or the frame sync SC2/SC1 in
the tables and in the figures.
4. 50 percent duty cycle
5. bl = bit length; wl = word length
Table 16: ESSI Slave Mode
1
Switching Characteristics (Continued)
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
Parameter
Symbol
Min
Typ
Max
Units

Serial Communication Interface (SCI) Timing
MOTOROLA
DSP56853 Preliminary Technical Data
39
Figure 30. Slave Mode Clock Timing
4.12 Serial Communication Interface (SCI) Timing
Table 17. SCI Timing
4
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
Characteristic
Symbol
Min
Max
Unit
Baud Rate
1
1.
f
MAX
is the frequency of operation of the system clock in MHz.
BR
--
(f
MAX
)/(32)
Mbps
RXD
2
Pulse Width
2.
The RXD pin in SCI0 is named RXD0 and the RXD pin in SCI1 is named RXD1.
RXD
PW
0.965/BR
1.04/BR
ns
TXD
3
Pulse Width
3.
The TXD pin in SCI0 is named TXD0 and the TXD pin in SCI1 is named TXD1.
4.
Parameters listed are guaranteed by design.
TXD
PW
0.965/BR
1.04/BR
ns
t
THS
t
TSS
t
HS
t
SS
t
RFSWLS
t
RFSWHS
t
RFBLS
t
RFSBHS
t
TXHIS
t
TXNVS
t
FTXVS
t
TXVS
t
FTXES
t
TXES
t
TFSWLS
t
TFSWHS
t
TFSBLS
t
TFSBHS
t
SCKL
t
SCKW
t
SCKH
First Bit
Last Bit
SCK input
SC2 (bl) input
SC2 (wl) input
STD
SC0 input
SC1 (bl) input
SC1 (wl) input
SRD

40
DSP56853 Preliminary Technical Data
MOTOROLA
Figure 31. RXD Pulse Width
Figure 32. TXD Pulse Width
4.13 JTAG Timing
Table 18. JTAG Timing
1, 3
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
1.
Timing is both wait state and frequency dependent. For the values listed, T = clock cycle. For 120MHz
operation, T = 8.33ns.
Characteristic
Symbol
Min
Max
Unit
TCK frequency of operation
2
2.
TCK frequency of operation must be less than 1/4 the processor rate.
3.
Parameters listed are guaranteed by design.
f
OP
DC
30
MHz
TCK cycle time
t
CY
33.3
--
ns
TCK clock pulse width
t
PW
16.6
--
ns
TMS, TDI data setup time
t
DS
3
--
ns
TMS, TDI data hold time
t
DH
3
--
ns
TCK low to TDO data valid
t
DV
--
12
ns
TCK low to TDO tri-state
t
TS
--
10
ns
TRST assertion time
t
TRST
35
--
ns
DE assertion time
t
DE
4T
--
ns
RXD
SCI receive
data pin
(Input)
RXD
PW
TXD
SCI receive
data pin
(Input)
TXD
PW

JTAG Timing
MOTOROLA
DSP56853 Preliminary Technical Data
41
Figure 33. Test Clock Input Timing Diagram
Figure 34. Test Access Port Timing Diagram
Figure 35. TRST Timing Diagram
Figure 36. Enhanced OnCE--Debug Event
TCK
(Input)
V
M
V
IL
V
M
= V
IL
+ (V
IH
≠ V
IL
)/2
V
M
V
IH
t
PW
t
PW
t
CY
Input Data Valid
Output Data Valid
TCK
(Input)
TDI
(Input)
TDO
(Output)
TDO
(Output
)
TMS
t
TS
t
DV
t
DS
t
DH
TRST
(Input)
t
TRST
DE
t
DE

42
DSP56853 Preliminary Technical Data
MOTOROLA
4.14 GPIO Timing
Figure 37. GPIO Timing
Table 19. GPIO Timing
1, 2
Operating Conditions: V
SS
= V
SSIO
= V
SSA
= 0 V, V
DD
= 1.62-1.98V, V
DDIO
= V
DDA
=
3.0≠3.6V, T
A
= ≠40
∞
to +120
∞
C, C
L
50pF, f
op
= 120MHz
1.
In the formulas listed, T = clock cycle. For f
op
= 120MHz operation and fipb = 60MHz, T = 8.33ns
2.
Parameters listed are guaranteed by design.
Characteristic
Symbol
Min
Max
Unit
GPIO input period
P
IN
2T + 3
--
ns
GPIO input high/low period
P
INHL
1T + 3
--
ns
GPIO output period
P
OUT
2T - 3
--
ns
GPIO output high/low period
P
OUTHL
1T - 3
--
ns
GPIO Inputs
GPIO Outputs
P
INHL
P
INHL
P
IN
P
OUTHL
P
OUTHL
P
OUT

Package and Pin-Out Information DSP56853
MOTOROLA
DSP56853 Preliminary Technical Data
43
Part 5 Packaging
5.1 Package and Pin-Out Information DSP56853
This section contains package and pin-out information for the 128-pin LQFP configuration of the
DSP56853.
Figure 38. Top View, DSP56853 128-pin LQFP Package
PIN 103
PIN 1
PIN 39
PIN 65
MO
SI
SC
K
SS
V
DD
I
O
V
SSI
O
RD
WR
A1
A2
A3
V
DD
V
SS
MO
DA
MO
DB
MO
D
C
V
DD
I
O
V
SSI
O
IR
Q
A
IR
Q
B
V
DD
A
V
SSA
XT
AL
EXT
AL
A4
Motorola
DSP56853
ORIENTATION
MARK
RS
TO
RE
S
E
T
HD
3
HD
4
HD
5
HD6
HD7
V
DDIO
V
SSIO
A8
A9
A10
A11
V
DD
V
SS
DE
TRST
TDO
TDI
TMS
TCK
V
DDIO
V
SSIO
A12
TX
D
1
RX
D1
V
SS
I
O
V
DD
IO
V
DD
IO
D5
D4
D3
D2
D1
HRWB
HA
2
HA
1
HA
0
V
SS
V
DD
V
DD
CS
3
CS
2
CS
1
CS
0
V
SS
I
O
D0
V
DD
IO
A20
A13
A14
A15
V
DDIO
V
SS
V
DD
V
SS
TI
O
3
TI
O
2
TI
O
1
V
DD
IO
TI
O
0
V
SS
I
O
HDS
HCS
HREQ
HACK
D6
D7
D8
D9
D10
V
DD
V
SS
V
DDIO
V
SSIO
STD0
SRD0
SCK0
SC00
SC01
SC02
D11
D12
V
DDIO
V
SSIO
D13
D14
D15
MI
SO
A5
A6
A7
HD
0
HD
1
HD
2
A0
A19
A18
A17
A16
TX
D
0
RX
D0
CL
K
O
V
SSIO

44
DSP56853 Preliminary Technical Data
MOTOROLA
Table 20. DSP56853 Pin Identification by Pin Number
Pin No.
Signal Name
Pin No.
Signal Name
Pin No.
Signal Name
Pin No.
Signal Name
1
MISO
33
CLKO
65
RXD0
97
TIO3
2
MOSI
34
RSTO
66
TXDO
98
TIO2
3
SCK
35
RESET
67
A16
99
TIO1
4
SS
36
HD3
68
A17
100
V
DDIO
5
V
DDIO
37
HD4
69
A18
101
TIO0
6
V
SSIO
38
HD5
70
A19
102
V
SSIO
7
RD
39
HD6
71
A20
103
HDS
8
WR
40
HD7
72
V
DDIO
104
HCS
9
A0
41
V
DDIO
73
D0
105
HREQ
10
A1
42
V
SSIO
74
V
SSIO
106
HACK
11
A2
43
A8
75
CS0
107
D6
12
A3
44
A9
76
CS1
108
D7
13
V
DD
45
A10
77
CS2
109
D8
14
V
SS
46
A11
78
CS3
110
D9
15
MODA
47
V
DD
79
V
DD
111
D10
16
MODB
48
V
SS
80
V
DD
112
V
DD
17
MODC
49
DE
81
V
SS
113
V
SS
18
V
DDIO
50
TRST
82
HA0
114
V
DDIO
19
V
SSIO
51
TDO
83
HA1
115
V
SSIO
20
IRQA
52
TDI
84
HA2
116
STD0
21
IRQB
53
TMS
85
HRWB
117
SRD0
22
V
DDA
54
TCK
86
D1
118
SCK0
23
V
SSA
55
V
DDIO
87
D2
119
SC00
24
XTAL
56
V
SSIO
88
D3
120
SC01
25
EXTAL
57
A12
89
D4
121
SC02
26
A4
58
A13
90
D5
122
D11
27
A5
59
A14
91
V
DDIO
123
D12
28
A6
60
A15
92
V
DDIO
124
V
DDIO
29
A7
61
V
DDIO
93
V
SSIO
125
V
SSIO
30
HD0
62
V
SSIO
94
RXD1
126
D13
31
HD1
63
V
SS
95
TXD1
127
D14
32
HD2
64
V
DD
96
V
SS
128
D15

Package and Pin-Out Information DSP56853
MOTOROLA
DSP56853 Preliminary Technical Data
45
Figure 39. 128-pin LQFP Mechanical Information
NOTES:
1. DIMENSIONING AND TOLERANCING PER ASME Y14.5M,
1994.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DATUM PLANE H IS LOCATED AT BOTTOM OF LEAD AND IS
COINCIDENT WITH THE LEAD WHERE THE LEAD EXITS THE
PLASTIC BODY AT THE BOTTOM OF THE PARTING LINE.
4. DATUMS A, B, AND D TO BE DETERMINED AT DATUM PLANE
H.
5. DIMENSIONS D AND E TO BE DETERMINED AT SEATING
PLANE C.
6. DIMENSIONS D1 AND E1 DO NOT INCLUDE MOLD
PROTRUSION. ALLOWABLE PROTRUSION IS 0.25 PER SIDE.
DIMENSIONS D1 AND E1 DO INCLUDE MOLD MISMATCH
AND ARE DETERMINED AT DATUM PLANE H.
7. DIMENSION b DOES NOT INCLUDE DAMBAR PROTRUSION.
DAMBAR PROTRUSION SHALL NOT CAUSE THE b
DIMENSION TO EXCEED 0.35.
DIM
MILLIMETERS
MIN
MAX
A
---
1.60
A1
0.05
0.15
A2
1.35
1.45
b
0.17
0.27
b1
0.17
0.23
c
0.09
0.20
c1
0.09
0.16
D
22.00 BSC
D1
20.00BSC
e
0.50 BSC
E
16.00 BSC
E1
14.00 BSC
L
0.45
0.75
L1
1.00 REF
L2
0.50 REF
S
0.20
---
R1
0.08
---
R2
0.08
0.20
0
0
o
7
o
01
0
o
---
02
11
o
13
o
Case Outline - 1129-01
128
103
38
102
65
64
39

46
DSP56853 Preliminary Technical Data
MOTOROLA
Part 6 Design Considerations
6.1 Thermal Design Considerations
An estimation of the chip junction temperature, T
J
, in
∞C can be obtained from the equation:
Equation 1:
T
J
= T
A
+ (P
D
x R
JA
)
Where:
T
A
= ambient temperature ∞C
R
JA
= package junction-to-ambient thermal resistance ∞C/W
P
D
= power dissipation in package
Historically, thermal resistance has been expressed as the sum of a junction-to-case thermal resistance and
a case-to-ambient thermal resistance:
Equation 2:
R
JA
= R
JC
+ R
CA
Where:
R
JA
= package junction-to-ambient thermal resistance ∞C/W
R
JC
= package junction-to-case thermal resistance ∞C/W
R
CA
= package case-to-ambient thermal resistance ∞C/W
R
JC
is device-related and cannot be influenced by the user. The user controls the thermal environment to
change the case-to-ambient thermal resistance, R
CA
. For example, the user can change the air flow around
the device, add a heat sink, change the mounting arrangement on the Printed Circuit Board (PCB), or
otherwise change the thermal dissipation capability of the area surrounding the device on the PCB. This
model is most useful for ceramic packages with heat sinks; some 90% of the heat flow is dissipated through
the case to the heat sink and out to the ambient environment. For ceramic packages, in situations where the
heat flow is split between a path to the case and an alternate path through the PCB, analysis of the device
thermal performance may need the additional modeling capability of a system level thermal simulation tool.
The thermal performance of plastic packages is more dependent on the temperature of the PCB to which the
package is mounted. Again, if the estimations obtained from R
JA
do not satisfactorily answer whether the
thermal performance is adequate, a system level model may be appropriate.
A complicating factor is the existence of three common definitions for determining the junction-to-case
thermal resistance in plastic packages:
∑
Measure the thermal resistance from the junction to the outside surface of the package (case) closest
to the chip mounting area when that surface has a proper heat sink. This is done to minimize
temperature variation across the surface.
∑
Measure the thermal resistance from the junction to where the leads are attached to the case. This
definition is approximately equal to a junction to board thermal resistance.
∑
Use the value obtained by the equation (T
J
≠ T
T
)/P
D
where T
T
is the temperature of the package
case determined by a thermocouple.
As noted above, the junction-to-case thermal resistances quoted in this data sheet are determined using the
first definition. From a practical standpoint, that value is also suitable for determining the junction
temperature from a case thermocouple reading in forced convection environments. In natural convection,
using the junction-to-case thermal resistance to estimate junction temperature from a thermocouple reading

Electrical Design Considerations
MOTOROLA
DSP56853 Preliminary Technical Data
47
on the case of the package will estimate a junction temperature slightly hotter than actual. Hence, the new
thermal metric, Thermal Characterization Parameter, or
JT
, has been defined to be (T
J
≠ T
T
)/P
D
. This value
gives a better estimate of the junction temperature in natural convection when using the surface temperature
of the package. Remember that surface temperature readings of packages are subject to significant errors
caused by inadequate attachment of the sensor to the surface and to errors caused by heat loss to the sensor.
The recommended technique is to attach a 40-gauge thermocouple wire and bead to the top center of the
package with thermally conductive epoxy.
6.2 Electrical Design Considerations
Use the following list of considerations to assure correct DSP operation:
∑
Provide a low-impedance path from the board power supply to each V
DD
pin on the DSP, and from
the board ground to each V
SS
(GND) pin.
∑
The minimum bypass requirement is to place six 0.01≠0.1
µF capacitors positioned as close as
possible to the package supply pins. The recommended bypass configuration is to place one bypass
capacitor on each of the ten V
DD
/V
SS
pairs, including V
DDA
/V
SSA.
∑
Ensure that capacitor leads and associated printed circuit traces that connect to the chip V
DD
and
V
SS
(GND) pins are less than 0.5 inch per capacitor lead.
∑
Use at least a four-layer Printed Circuit Board (PCB) with two inner layers for V
DD
and GND.
∑
Bypass the V
DD
and GND layers of the PCB with approximately 100
µF, preferably with a high-
grade capacitor such as a tantalum capacitor.
∑
Because the DSP output signals have fast rise and fall times, PCB trace lengths should be minimal.
∑
Consider all device loads as well as parasitic capacitance due to PCB traces when calculating
capacitance. This is especially critical in systems with higher capacitive loads that could create
higher transient currents in the V
DD
and GND circuits.
∑
All inputs must be terminated (i.e., not allowed to float) using CMOS levels.
∑
Take special care to minimize noise levels on the V
DDA
and V
SSA
pins.
∑
When using Wired-OR mode on the SPI or the IRQx pins, the user must provide an external pull-
up device.
CAUTION
This device contains protective circuitry to guard against
damage due to high static voltage or electrical fields.
However, normal precautions are advised to avoid
application of any voltages higher than maximum rated
voltages to this high-impedance circuit. Reliability of
operation is enhanced if unused inputs are tied to an
appropriate voltage level.

DSP56853/D
MOTOROLA and the Stylized M Logo are registered in the US Patent & Trademark Office. All other product or service names are the property of their
respective owners. © Motorola, Inc. 2003.
How to reach us:
USA/EUROPE/Locations Not Listed: Motorola Literature Distribution; P.O. Box 5405, Denver, Colorado 80217. 1≠303≠675≠2140 or 1≠800≠441≠2447
JAPAN: Motorola Japan Ltd.; SPS, Technical Information Center, 3≠20≠1, Minami≠Azabu. Minato≠ku, Tokyo 106≠8573 Japan. 81≠3≠3440≠3569
ASIA/PACIFIC: Motorola Semiconductors H.K. Ltd.; Silicon Harbour Centre, 2 Dai King Street, Tai Po Industrial Estate, Tai Po, N.T., Hong Kong. 852≠26668334
Technical Information Center: 1≠800≠521≠6274
HOME PAGE: http://www.motorola.com/semiconductors/
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty, representation or guarantee regarding the
suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. "Typical" parameters which may be provided in Motorola
data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including
"Typicals" must be validated for each customer application by customer's technical experts. Motorola does not convey any license under its patent rights nor the
rights of others. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other
applications intended to support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injury
or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola
and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees
arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that
Motorola was negligent regarding the design or manufacture of the part. Motorola and the Stylized M Logo are registered trademarks of Motorola, Inc. Motorola,
Inc. is an Equal Opportunity/Affirmative Action Employer.
∑
Designs that utilize the TRST pin for JTAG port or Enhance OnCE module functionality (such as
development or debugging systems) should allow a means to assert TRST whenever RESET is
asserted, as well as a means to assert TRST independently of RESET. Designs that do not require
debugging functionality, such as consumer products, should tie these pins together.
∑
The internal POR (Power on Reset) will reset the part at power on with reset asserted or pulled high
but requires that TRST be asserted at power on.
Part 7 Ordering Information
Table 21
lists the pertinent information needed to place an order. Consult a Motorola Semiconductor sales
office or authorized distributor to determine availability and to order parts.
Table 21. DSP56853 Ordering Information
Part
Supply
Voltage
Package Type
Pin
Count
Frequency
(MHz)
Order Number
DSP56853
1.8V, 3.3V
Low-Profile Quad Flat Pack (LQFP)
128
120
DSP56853FG120