
NJM3770A
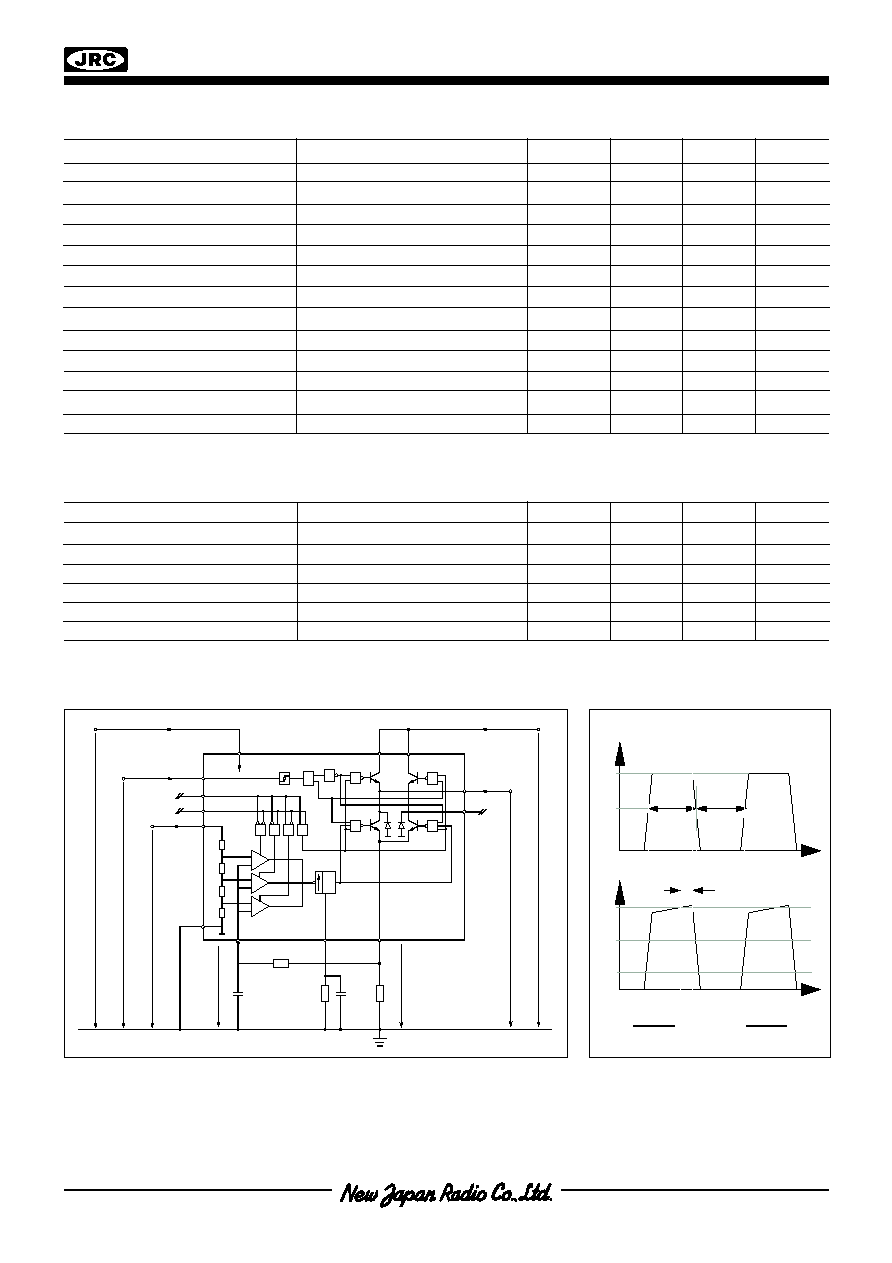
Figure 1. Block diagram
STEPPER MOTOR DRIVER
s
GENERAL DESCRIPTION
s
PACKAGE OUTLINE
NJM3770AD3
NJM3770AE2
NJM3770AFM2
NJM3770A is a stepper motor driver, which consists of a
LS-TTL compatible logic input stage, a current sensor, a
monostable multivibrator and a high power H-bridge output
stage. The NJM3770A is a high power version and pin-
compatible with the NJM3717.Two NJM3770A and a small
number of external components form a complete control
and drive unit stepper motor systems.
s
EATURES
∑ Half-step and full-step operation
∑ Switched mode bipolar constant current drive
∑ Wide range of current control 5 -1800 mA
∑ Wide voltage range 10 - 45 V
∑ Thermal overload protection
∑ Packages DIP16 (Batwing) / PLCC28 / EMP20
s
BLOCK DIAGRAM
GND
V
CC
M
A
M
B
Phase
I
1
I
0
V
R
&
&
&
&
≠
+
≠
+
≠
+
Monostable
t = 0.69 ∑ R ∑ C
Current Sensor
Output Stage
off
T T
Schmitt
Trigger
Time
Delay
C
T
E
NJM3770A
1
1
1
1
V
MM
V
MM
1

NJM3770A
Figure 2. Pin configurations
s
PIN CONFIGURATIONS
s
PIN DESCRIPTION
EMP
DIP
PLCC
Symbol
Description
1
1
10
M
B
Motor output B, Motor current flows from M
A
to M
B
when Phase is high.
2
2
11
T
Clock oscillator. Timing pin connect a 56 k
resistor and a 820 pF in
parallel between T and Ground.
3
3,14
12,4
V
MM
Motor supply voltage, 10 to 40 V. Pin 3(12) and pin 14(4) should be wired to
gether.
4-7,
4,5,
1-3,9,
GND
Ground and negative supply. Note these pins are used for heatsinking.
14-18
12,13
13-17,28
Make sure that all ground pins are soldered onto a suitable large copper
ground plane for efficient heat sinking.
8
6
18
V
CC
Logic voltage supply normally +5 V.
9
7
19
I
1
Logic input. It controls, together with the I0 input, the current level in the output
stage.
The controllable levels are fixed to 100, 60, 20, 0%.
10
8
20
Phase
Controls the direction of the motor current of M
A
and M
B
outputs.
Motor current flows from M
A
to M
B
when the phase input is high.
11
9
21
I
0
Logic input. It controls, together with the I
1
input, the current level in the output
stage.
The controllable levels are fixed to 100, 60, 20, 0%.
12
10
23
C
Comparator input. This input senses the instantaneous voltage across the
sensing
resistor, filtered through a RC Network.
13
11
24
V
R
Reference voltage. Controls the threshold voltage of the comparator and hence
the output current. Input resistance: typically 6.8 k
±
20%.
19
15
6
M
A
Motor output A, Motor current flows from M
A
to M
B
when Phase is high.
20
16
8
E
Common emitter. Connect the Sense resistor between this pin and ground.
1
2
3
4
5
6
7
8
9
10
18
17
16
15
14
13
12
11
I1
VR
M
B
VCC
T
VMM
GND
E
Phase
0
C
19
20
GND
GND
GND
GND
GND
GND
GND
VMM
M
A
NJM
3770AE2
I
N/C
A
N/C
E
GND
B
T
N/C
V
C
N/C
I
Phase
I
V
GND
GND
GND
GND
N/C
N/C
MM
GND
GND
GND
GND
GND
CC
5
6
7
8
9
10
11
25
24
23
22
21
20
19
4
3
2
1
28
27
26
12
13
14
15
16
17
18
MM
R
0
1
V
V
M
M
NJM
3770AFM2
B
T
MM
GND
GND
CC
1
Phase
E
M
GND
GND
V
C
I
1
2
3
4
5
6
7
8
16
15
14
13
12
11
10
9
A
V
MM
R
0
I
V
V
M
NJM
3770AD3

NJM3770A
s
FUNCTIONAL DESCRIPTION
The NJM3770A is intended to drive a bipolar constant current through one winding of a 2-phase stepper motor.
Current control is achieved through switched-mode regulation, see figure 3 and 4.
Three different current levels and zero current can be selected by the input logic.
The circuit contains the following functional blocks:
∑ Input logic
∑ Current sense
∑ Single-pulse generator
∑ Output stage
Input logic
Phase input
The phase input determines the direction of the current in the motor winding. High input forces the current from
terminal M
A
to M
B
and low input from terminal M
B
to M
A
. A Schmitt trigger provides noise immunity and a delay
circuit eliminates the risk of cross conduction in the output stage during a phase shift.
Half- and full-step operation is possible.
Fast Current Decay
Slow Current Decay
Motor Current
Time
1 2
3
3
2 1
External recirculation
diodes
R
S
Figure 4. Motor current (I
M
),
Vertical : 200 mA/div,
Horizontal: 1 ms/div,
expanded part 100
µ
s/div.
Figure 3. Output stage with current paths
for fast and slow current decay.
0
200 mA/div
1 ms/div
100
µ
s/div

NJM3770A
Current level selection.
The status of I
0
and I
1
inputs determines the current level in the motor winding. Three fixed current levels can be
selected according to the table below.
Motor current
I
0
I
1
High level
100%
L
L
Medium level 60%
H
L
Low level
20%
L
H
Zero current
0%
H
H
The specific values of the different current levels are determined by the reference voltage V
R
together with the
value of the sensing resistor R
S
.
The peak motor current can be calculated as follows:
i
m
= (V
R
∑ 0.080) / R
S
[A], at 100% level
The motor current can also be continuously varied by modulating the voltage reference input.
Current sensor
The current sensor contains a reference voltage divider and three comparators for measuring each of the selectable
current levels. The motor current is sensed as a voltage drop across the current sensing resistor, R
S
, and compared
with one of the voltage references from the divider. When the two voltages are equal, the comparator triggers the
single-pulse generator. Only one comparator at a time is activated by the input logic.
Single-pulse generator
The pulse generator is a monostable multivibrator triggered on the positive edge of the comparator output. The
multivibrator output is high during the pulse time, t
off
, which is determined by the timing components R
T
and C
T
.
t
off
= 0.69 ∑ R
T
∑ C
T
The single pulse switches off the power feed to the motor winding, causing the winding to decrease during t
off
.
If a new trigger signal should occur during t
off
, it is ignored.
Output stage
The output stage contains four transistors and two diodes, connected in an H-bridge. Note that the upper recircula-
tion diodes are connected to the circuit externally. The two sinking transistors are used to switch the power supplied
to the motor winding, thus driving a constant current through the winding. See figures 3 and 4.
Overload protection
The circuit is equipped with a thermal shut-down function, which will limit the junction temperature. The output current
will be reduced if the maximum permissible junction temperature is exceeded. It should be noted, however, that it is
not short circuit protected.
Operation
When a voltage V
MM
is applied across the motor winding, the current rise follows the equation:
i
m
= (V
MM
/ R) ∑ (1 - e
-(R ∑ t ) / L
)
R = Winding resistance
L = Winding inductance
t = time
(see figure 3, arrow 1)
The motor current appears across the external sensing resistor, R
S
, as an analog voltage. This voltage is fed
through a low-pass filter, R
C
C
C
, to the voltage comparator input (pin 10). At the moment the sensed voltage rises
above the comparator threshold voltage, the monostable is triggered and its output turns off the conducting sink
transistor.The polarity across the motor winding reverses and the current is forced to circulate through the appropri-
ate upper protection diode back through the source transistor (see figure 3, arrow 2).
After the monostable has timed out, the current has decayed and the analog voltage across the sensing resistor is
below the comparator threshold level.The sinking transistor then turns on and the motor current starts to increase
again, The cycle is repeated until the current is turned off via the logic inputs.When both I
1
and I
0
are high, all four
transistors in the output H-bridge are turned off, which means that inductive current recirculates through two opposite
free-wheeling diodes (see figure 3, arrow 3). this method of turning off the current results in a faster current decay
than if only one transistor was turned off and will therefore improve speed performance in half-stepping mode.
NJM3770A
Figure 5. Definition of symbols
s
ABSOLUTE MAXIMUM RATINGS
Parameter
Pin no. [DIP package]
Symbol
Min
Max
Unit
Voltage
Logic supply
6
V
CC
0
7
V
Motor supply
3, 14
V
MM
0
45
V
Logic inputs
7,8,9
V
I
-0.3
6
V
Comparator input
10
V
C
-0.3
V
CC
V
Reference input
11
V
R
-0.3
15
Current
Motor output current
1, 15
I
M
-1800
+1800
mA
Logic inputs
7,8,9
I
I
-10
-
mA
Analog inputs
10,11
I
A
-10
-
mA
Temperature
Operating junction temperature
T
j
-40
+150
∞
C
Storage temperature
T
s
-55
+150
∞
C
s
RECOMMENDED OPERATING CONDITIONS
Parameter
Symbol
Min
Typ
Max
Unit
Logic supply voltage
V
CC
4.75
5
5.25
V
Motor supply voltage
V
MM
10
-
40
V
Motor output current
I
M
-1500
-
+1500
mA
Junction temperature
T
J
-20
-
+125
∞
C
Rise time logic inputs
t
r
-
-
2
µ
s
Fall time logic inputs
t
f
-
-
2
µ
s
V
CC
I I
M OL
I
CC
I I I
I IH IL
I
A
820 pF
0.5
V
CC
V
V
V
I
IH
IL
V
V
A
R
V
C
I
I
C
A
V
E
V
V
M
MA
V
MM
R
R
C
820 pF
C
1 k
S
T
T
C
R
C
56 k
M
A
M
B
C
V
I MM
GND
Phase
I
1
I
0
V
R
&
&
&
&
≠
+
≠
+
≠
+
Monostable
t = 0.69 ∑ R ∑ C
Current Sensor
Output Stage
off
T T
Schmitt
Trigger
Time
Delay
C
T
E
NJM3770A
1
1
1
1
10
2
16
1
15
14
6 [18]
8
7
9
11
4, 5,
12, 13
3
V
MM
V
MM
1
Pin no. refers
to DIP-package
| V ≠ V |
1/2
1
V
CH
t
on
t
off
f =
s
t
on
t
off
+
Normalized
V
E
MA
MB
t
d
t
t
V
CM
V
CL
D =
t
on
t
off
+
1
t
on
Figure 6. Definition of terms

NJM3770A
s
ELECTRICAL CHARACTERISTICS
Electrical characteristics over recommended operating conditions. C
T
= 820 pF, R
T
= 56 kohm
Parameter
Symbol
Conditions
Min
Typ
Max
Unit
General
Supply current
I
CC
V
MM
= 20 to 40 V, I
0
= I
1
= HIGH.
-
30
40
mA
V
MM
= 20 to 40 V, I
0
= I
1
= LOW,
-
48
65
mA
f
s
= 23 kHz
Total power dissipation
P
D
f
s
= 28 kHz, I
M
= 1.0A, V
MM
= 36 V
-
1.9
2.3
W
Note 2, 4.
f
s
= 24 kHz, I
M
= 1.0A, V
MM
= 12 V
-
1.7
2.1
W
Note 2, 4.
f
s
= 28 kHz, I
M
= 1.3A, V
MM
= 36 V
-
2.7
3.2
W
Note 3, 4.
f
s
= 28 kHz, I
M
= 1.5A, V
MM
= 36 V
-
3.5
-
W
Note 3, 4.
Turn-off delay
t
d
T
a
= +25
∞
C, dV
C
/dt
50 mV/
µ
s.
-
-
2.5
µ
s
Thermal shutdown junction temperature
-
170
-
∞
C
Logic Inputs
Logic HIGH input voltage
V
IH
2.0
-
-
V
Logic LOW input voltage
V
IL
-
-
0.8
V
Logic HIGH input current
I
IH
V
I
= 2.4 V
-
-
20
µ
A
Logic LOW input current
I
IL
V
I
= 0.4 V
-0.4
-
-
mA
Analog Inputs
Comparator threshold voltage
V
CH
V
R
= 5.0 V, I
0
= I
1
= LOW
400
415
430
mV
Comparator threshold voltage
V
CM
V
R
= 5.0 V, I
0
= HIGH, I
1
= LOW
240
250
265
mV
Comparator threshold voltage
V
CL
V
R
= 5.0 V, I
0
= LOW, I
1
= HIGH
70
80
90
mV
Input current
I
C
-20
-
-
µ
A
Motor Outputs
Lower transistor saturation voltage
I
M
= 1.0A
-
0.5
0.8
V
I
M
= 1.3A
-
0.8
1.3
V
Lower diode forward voltage drop
I
M
= 1.0A
-
1.3
1.6
V
I
M
= 1.3A
-
1.5
1.8
V
Upper transistor saturation voltage
I
M
= 1.0A
-
1.1
1.3
V
I
M
= 1.3A
-
1.3
1.6
V
Output leakage current
I
0
= I
1
= HIGH, T
a
= +25
∞
C
-
-
100
µ
A
Monostable
Cut off time
t
off
V
MM
= 10 V, t
on
5
µ
s
27
31
35
µ
s
s
THERMAL CHARACTERISTICS
Parameter
Symbol
Conditions
Min
Typ
Max
Unit
Thermal resistance
Rth
J-GND
DIP package.
-
11
-
∞
C/W
Rth
J-A
DIP package. Note 2.
-
40
-
∞
C/W
Rth
J-GND
PLCC package.
-
9
-
∞
C/W
Rth
J-A
PLCC package. Note 2.
-
35
-
∞
C/W
Rth
J-GND
EMP package.
-
11
-
∞
C/W
Rth
J-A
EMP package.
-
40
-
∞
C/W
Notes
1. All voltages are with respect to ground. Currents are positive into, negative out of specified terminal
2. All ground pins soldered onto a 20 cm
2
PCB copper area with free air convection Ta=+25
∞
C
3. DIP package with external heatsink (Staver V7) and minimal copper area. Typical Rth
J-A
= 27.5
∞
C/W. T
a
= +25
∞
C
4. Not covered by final test program
NJM3770A
T
C
E
M
A
M
B
V
V
R
NJM3770A
8
7
9
4, 5
12, 13
1
Phase
A
I
1A
I
0A
1
15
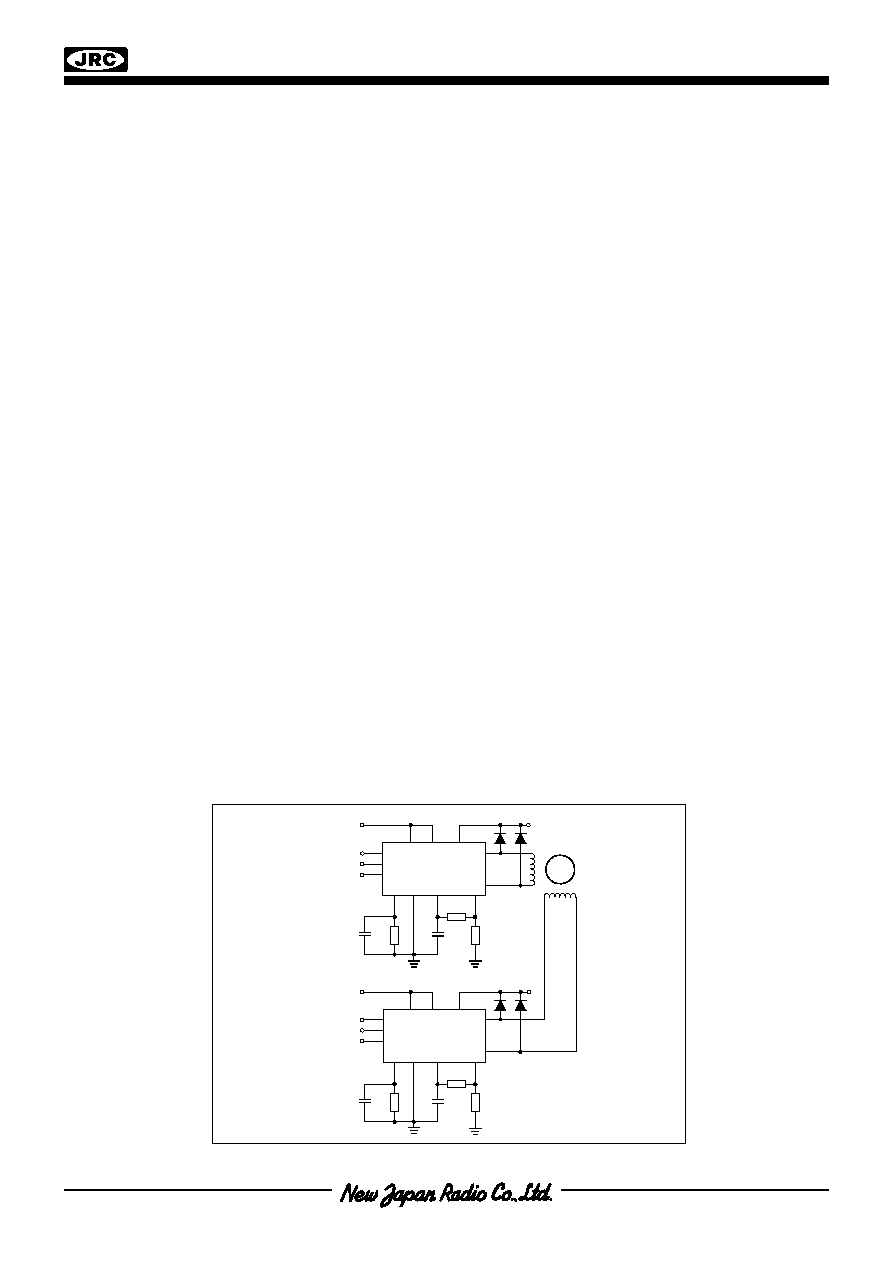
Diodes are
UF 4001 or
BYV27
t
100 ns
Phase
I
1
I
0
T
C
E
V
V
V
GND
M
A
M
B
NJM3770A
11
6
3,14
8
7
9
2
10
16
4, 5
12, 13
STEPPER
MOTOR
0.5
820pF
820pF
1k
56 k
0.5
V (+5V)
CC
V
MM
MM
CC
R
10
16
820pF
1k
15
V
MM
6
3,14
11
V (+5V)
CC
2
56 k
820pF
Phase
A
I
1A
I
0A
0
I
I
1
Phase
GND
V
CC
MM
s
APPLICATIONS INFORMATION
Motor selection
Some stepper motors are not designed for continuous operation at maximum current. As the circuit drives a
constant current through the motor, its temperature can increase, both at low- and high-speed operation.
Some stepper motors have such high core losses that they are not suited for switched-mode operation.
Interference
As the circuit operates with switched-mode current regulation, interference-generation problems can arise in some
applications. A good measure is then to decouple the circuit with a 0.1
µ
F ceramic capacitor, located near the
package across the power line V
MM
and ground.
Also make sure that the V
Ref
input is sufficiently decoupled. An electrolytic capacitor should be used in the +5 V
rail, close to the circuit.
The ground leads between R
S
, C
C
and circuit GND should be kept as short as possible. This applies also to the
leads connecting R
S
and R
C
to pin 16 and pin 10 respectively.
In order to minimize electromagnetic interference, it is recommended to route M
A
and M
B
leads in parallel on the
printed circuit board directly to the terminal connector. The motor wires should be twisted in pairs, each phase
separately, when installing the motor system.
Unused inputs
Unused inputs should be connected to proper voltage levels in order to obtain the highest possible noise immunity.
Ramping
A stepper motor is a synchronous motor and does not change its speed due to load variations. This means that the
torque of the motor must be large enough to match the combined inertia of the motor and load for all operation
modes. At speed changes, the requires torque increases by the square, and the required power by the cube of the
speed change. Ramping, i.e., controlled acceleration or deceleration must then be considered to avoid motor pull-
out.
V
CC
, V
MM
The supply voltages, V
CC
and V
MM
, can be turned on or off in any order. Normal dv/dt values are assumed.
Before a driver circuit board is removed from its system, all supply voltages must be turned off to avoid destruc-
tive transients being generated by the motor.
Switching frequency
The motor inductance, together with the pulse time, t
off
, determines the switching frequency of the current regulator.
The choice of motor may then require other values on the R
T
,
C
T
components than those recommended in figure 3,
to obtain a switching frequency above the audible range. Switching frequencies above 40 kHz are not recom-
mended because the current regulation can be affected.
Figure 7. Typical stepper motor driver application with NJM3770A

NJM3770A
Analog control
As the current levels can be continuously controlled by modulating the V
R
input, limited microstepping can be
achieved.
Sensor resistor
The R
S
resistor should be of a noninductive type power resistor. A 0.5 ohm resistor, tolerance
1%, is a good
choice for 800 mA max motor current at V
R
= 5V.
The peak motor current, i
m
, can be calculated by using the formula:
i
m
= (V
R
∑ 0.080) / R
S
[A], at 100% level
External recirculation diodes
Recirculation diodes must be connected across each motor terminal and the supply voltage, V
MM
. The anodes shall
be connected to the motor terminals and the cathodes to the V
MM
voltage. Ultra-fast recovery diodes should be
used for maximum performance and reliability.
Thermal resistance [
∞
C/W]
PCB copper foil area [cm ]
2
90
80
70
60
50
40
30
5
10
15
20
30
35
25
PLCC package
DIP package
16-pin
DIP
20-pin
EMP
28-pin
PLCC
I
0A
I
1A
Ph
A
Ph
B
I
0B
I
1B
I
MA
I
MB
100%
≠100%
60%
≠60%
20%
≠20%
100%
≠100%
60%
≠60%
Half step mode at 100 %
Full step mode at 60 %
Stand by mode
at 20 %
Full step position
Half step position
Figure 8. Copper foil used as a heatsink
Figure 9. Principal operating sequence.

NJM3770A
38.0 m
m
18,5 mm
11,6 mm
38.0
mm
33,5 m
m
38,5 mm
Heatsinking
The junction temperature of the chip highly effects the lifetime of the circuit. In high-current applications, the
heatsinking must be carefully considered.
The Rth
j-a
of the NJM3770A can be reduced by soldering the ground pins to a suitable copper ground plane on
the printed circuit board (see figure 8) or by applying an external heatsink type V7 or V8, see figure 10.
The diagram in figure 15 shows the maximum permissible power dissipation versus the ambient temperature in
∞
C, for heatsinks of the type V7, V8, or a 20 cm
2
copper area respectively. Any external heatsink or printed circuit
board copper must be connected to electrical ground.
For motor currents higher than approx 600 mA, some form of heatsinking is recommended to assure optimal
reliability.
The diagrams in figures 14 and 15 can be used to determine the required heatsinking of the circuit. In some
systems, forced-air cooling may be available to reduce the temperature rise of the circuit.
Figure 10. Heatsinks, Staver, type V7 and V8
by Columbia-Staver UK

NJM3770A
The specifications on this databook are only
given for information , without any guarantee
as regards either mistakes or omissions.
The application circuits in this databook are
described only to show representative
usages of the product and not intended for
the guarantee or permission of any right
including the industrial rights.
V
Sat
(V)
1.8
1.6
1.4
1.2
1.0
.8
.6
.4
.2
0
0
.40
.80
1.2
I
M
(A)
T
j
= 125
∞
C
j
T = 25
∞
C
1.6
V
Sat
(V)
1.8
1.6
1.4
1.2
1.0
.8
.6
.4
.2
0
0
.40
.80
1.2
I
M
(A)
T
j
= 125
∞
C
j
T = 25
∞
C
1.6
V
F
(V)
1.8
1.6
1.4
1.2
1.0
.8
.6
.4
.2
0
0
.40
.80
1.2
I
M
(A)
T
j
= 25
∞
C
j
T = 125
∞
C
1.6
P
D
(W)
2.0
1.5
1.0
.5
0
0
.50
1.0
1.5
I
M
(A)
2.5
V
MM
= 36 V
V
MM
= 12 V
3.0
50
150
T
Amb
(
∞
C)
0
2.0
4.0
3.0
1.0
P
D
(W)
100
W
ith
S
ta
ve
r V
7 (2
7.5
∞
C
/W
)
With Staver V8 (37.5
∞
C/W)
PCB heatsink (40
∞
C/W)
s
TYPICAL CHARACTERISTICS
Figure 11. Typical source saturation
vs. output current
F
igure 13. Typical sink saturation
vs. output current
Figure 12. Typical lower diode
voltage drop vs. recirculating current
Figure 14. Typical power dissipation
vs. motor current
Figure 15. Allowable power dissipation
vs. ambient temperature