Internal generation of microstepping signals
2-phase as well as 3-phase stepper motors
64 microsteps per full step
S-curve, trapezoidal, and velocity profile
trajectory modes
Incremental encoder feedback
On-the-fly motor stall detection
Software & feature compatible with other
versions of PMD's chipset family
Available in 1 or 2 axis configurations
32-bit position, velocity, acceleration and jerk
trajectory profile registers
Electronic Gearing
Two travel-limit switches per axis
Choice of PWM or DAC motor output signals
Chipset Developer's Kit Available
Features
General Description
The MC1241A is a dedicated motion processor which functions as a
complete chip-based stepper motor controller. Packaged in a 2-IC
chipset, this device performs trajectory profile generation and
microstepping signal generation. The chipset outputs PWM or
DAC-compatible motor command signals which directly drive the
windings of the stepping motor, eliminating the need for external
microstepping circuitry. The MC1241A also provides the ability to
input incremental encoder signals. It is available in a one, or a two-axis
configuration.
The MC1241A is functionally similar to other members of PMD's 1st
Generation Motion Processor Family however it adds the ability to
perform micrstepping signal generation. All of these devices provide
sophisticated trajectory generation allowing the creation of complex
motion sequences.
Both two and three-phase stepping motors are supported by the
MC1241A. An internal ROM-based lookup table is used to generate
the microstepping waveforms. The motor power level can be controlled
with a resolution of 16 bits. Changes to the motor power level can be
coordinated with other profile changes to optimize motor heat
dissipation under different load and acceleration conditions.
The chipset is controlled by a host processor which interfaces with the
chipset via an 8-bit, bi-directional port. Communications to/from the
chipset consist of packet-oriented messages.
The chipset is packaged in 2 68-pin PLCC packages. Both chips utilize
CMOS technology and are powered by 5 volts.
Doc. Rev. 11.03, Nov 1997
Microstepping Waveforms
Phase A
Phase B
Phase C
64
128
192
256
120 Deg
Phase A
Phase B
90 Deg
3-Phase Stepper
2-Phase Stepper
320
Microsteps
Performance Motion Devices, Inc. 12 Waltham St. Lexington, MA 02421 tel: 781.674.9860 fax: 781.674.9861 www.pmdcorp.com
Advanced Microstepping
Motion Control Chipset
MC1241A
MC1141A
2
Table of Contents
Product Family Overview....................................... Page 3
Introduction........................................................... Page 3
Family Summary................................................... Page 3
Electrical Characteristics....................................... Page 4
Absolute Maximum Ratings.................................. Page 4
Operating Ratings................................................. Page 4
DC Electrical Characteristics ................................ Page 5
AC Electrical Characteristics ................................ Page 5
I/O Timing Diagrams............................................. Page 7
Pinouts .................................................................... Page 12
MC1241A, MC1141A Pinouts............................... Page 12
Pin Descriptions.................................................... Page 13
Theory of Operations ............................................. Page 17
Operational Parameters ....................................... Page 18
Trajectory Profile Generation................................ Page 18
S-curve Point to Point ....................................... Page 19
Trapezoidal Point to Point................................. Page 20
Velocity Contouring........................................... Page 20
Electronic Gear................................................. Page 21
Trajectory Control .......................................................... Page 21
Halting The Trajectory ...................................... Page 21
Motion Complete Status ................................... Page 22
Parameter Loading & Updating ............................ Page 22
Manual Update ................................................. Page 22
Breakpoints....................................................... Page 23
Disabling Automatic Profile Update .................. Page 23
Travel Limit Switches........................................ Page 23
Axis Timing ........................................................... Page 24
Host Communications .......................................... Page 25
Electrical Interface ............................................ Page 25
Packet Format .................................................. Page 25
Packet Checksum............................................. Page 26
Illegal Commands............................................. Page 26
Command Errors .............................................. Page 26
Axis Addressing ................................................ Page 27
Axis Status............................................................ Page 27
Status Word...................................................... Page 27
Miscellaneous Mode Status Word .................... Page 27
Host Interrupts.......................................................Page 28
Encoder Position Feedback ..................................Page 29
High Speed Position Capture ............................Page 29
Position Capture ReadBack ..............................Page 29
Stall Detection ...................................................Page 29
Position Error ....................................................Page 30
Recovering From A Motion Error ......................Page 30
Microstepping........................................................Page 30
Microstepping Waveforms.................................Page 31
Motor Command Control...................................Page 31
AC Induction Motor Control...............................Page 31
Command Summary .........................................Page 32
Motor Output .........................................................Page 32
Motor Output Signal Interpretation ....................Page 32
DAC16 Decoding...............................................Page 32
PWM Decoding .................................................Page 32
Motor Drive Configurations ...............................Page 33
3-Phase Drive Configuration .............................Page 33
Host Commands .....................................................Page 34
Command Summary .............................................Page 34
Command Reference ............................................Page 36
Axis Control.......................................................Page 36
Profile Generation .............................................Page 37
Parameter Update.............................................Page 41
Interrupt Processing ..........................................Page 43
Status/Mode ......................................................Page 44
Motor Control ....................................................Page 45
Encoder.............................................................Page 46
Miscellaneous ...................................................Page 48
Microstepping....................................................Page 49
Application Notes ...................................................Page 52
Interfacing MC1241A to ISA bus...........................Page 52
PWM Motor Interface ............................................Page 54
16-Bit Serial DAC Motor interface .........................Page 56
Performance Motion Devices, Inc. does not assume any responsibility for use of any circuitry described in this manual, nor does it make
any guarantee as to the accuracy of this manual. Performance Motion Devices, Inc. reserves the right to change the circuitry described in
this manual, or the manual itself, at any time.
The components described in this manual are not authorized for use in life-support systems without the express written permission of
Performance Motion Devices, Inc..
3
Product Family Overview
MC1401 series
MC1231 series
MC1241 series
MC1451 series
# of axes
4, 2, or 1
2 or 1
2 or 1
4, 2, or 1
Motors Supported
DC Servo
Brushless Servo
Stepper
Stepper
Encoder Format
Incremental (no dash version)
and Parallel ('-P' version)
Incremental
Incremental
Incremental (-E version)
Output Format
DC servo
Sinusoidally
commutated
Microstepping
Pulse and Direction
S-curve profiling
Yes
Yes
Yes
Yes
Electronic gearing
Yes
Yes
Yes
Yes
On-the-fly changes
Yes
Yes
Yes
Yes
Limit switches
Yes
Yes
Yes
Yes
PID & feedforward
Yes
Yes
-
-
PWM output
Yes
Yes
Yes
-
DAC-compatible output
Yes
Yes
Yes
-
Pulse & direction output
-
-
-
Yes
Index & Home signal
Yes
Yes
Yes
Yes (-E version)
Chipset p/n's
MC1401A, MC1401A-P (4 axes)
MC1201A, MC1201A-P (2 axes)
MC1101A, MC1101A-P (1 axis)
MC1231A (2 axes)
MC1131A (1 axis)
MC1241A (2 axes)
MC1141A (1 axis)
MC1451A, MC1451A-E (4 axes)
MC1251A, MC1251A-E (2 axes)
MC1151A, MC1151A-E (1 axis)
Developer's Kit p/n's:
DK1401A, DK1401A-P
DK1231A
DK1241A
DK1451A
Introduction
This manual describes the operational characteristics of the MC1241A
and MC1141A Motion Processors. These devices are members of
PMD's 1st generation motion processor family, which consists of 16
separate products organized into four groups.
Each of these devices are complete chip-based motion controllers.
They provide trajectory generation and related motion control functions.
Depending on the type of motor controlled they provide servo loop
closure, on-board commutation for brushless motors, and high speed
pulse and direction outputs. Together these products provide a
software-compatible family of dedicated motion processor chips which
can handle a large variety of system configurations.
Each of these chips utilize a similar architecture, consisting of a high-
speed DSP (Digital Signal Processor) computation unit , along with an
ASIC (Application Specific Integrated Circuit). The computation unit
contains special on-board hardware such as a multiply instruction that
makes it well suited for the task of motion control.
Along with a similar hardware architecture these chips also share most
software commands, so that software written for one chipset may be re-
used with another, even though the type of motor may be different.
This manual describes the operation of the MC1241A and
MC1141A chipsets. For technical details on other members of
PMD's 1st generation motion processors see the corresponding
product manual.
Family Summary
MC1401 series (MC1401A, MC1201A, MC1101A, MC1401A-P,
MC1201A-P, MC1101A-P) - These chipsets take in incremental
encoder signals (standard version) or parallel word encoder signals
(-P version) and output a motor command in either PWM or DAC-
compatible format. These chipsets come in 1, 2 or 4 axis versions
and can be used with DC brushed motors, or brushless motors using
external commutation.
MC1231 series (MC1231A, MC1131A) - These chipsets take in
incremental quadrature encoder signals and output sinusoidally
commutated motor signals appropriate for driving brushless motors.
They are available in one or two axis versions. Depending on the
motor type they output two or three phased signals per axis in either
PWM or DAC-compatible format.
MC1241 series (MC1241A, MC1141A) - These chipsets provide
internal microstepping generation for stepping motors. They are
available in a one or a two-axis version. Two phased signals are
output per axis in either PWM or DAC-compatible format. An
incremental encoder signal can be input to confirm motor position.
MC1451 series (MC1451A, MC1251A, MC1151A, MC1451A-E,
MC1251A-E, MC1151A-E) - These chipsets provide very high speed
pulse and direction signal output appropriate for driving step motor-
based systems. They are available in a one, two, or four-axis version
and are also available with quadrature encoder input.
Each of these chipsets has an associated Chipset Developer's
Kit available for it. For more information contact your PMD
representative.
4
Electrical Characteristics
Overview
The MC1241A consists of two 68 pin PLCC's both fabricated in CMOS.
The Peripheral Input/Output IC (I/O chip) is responsible for interfacing
to the host processor and to the position input encoders. The Command
Processor IC (CP chip) is responsible for all host command, trajectory,
and microstep computations, as well as for outputting the PWM and
DAC signals.
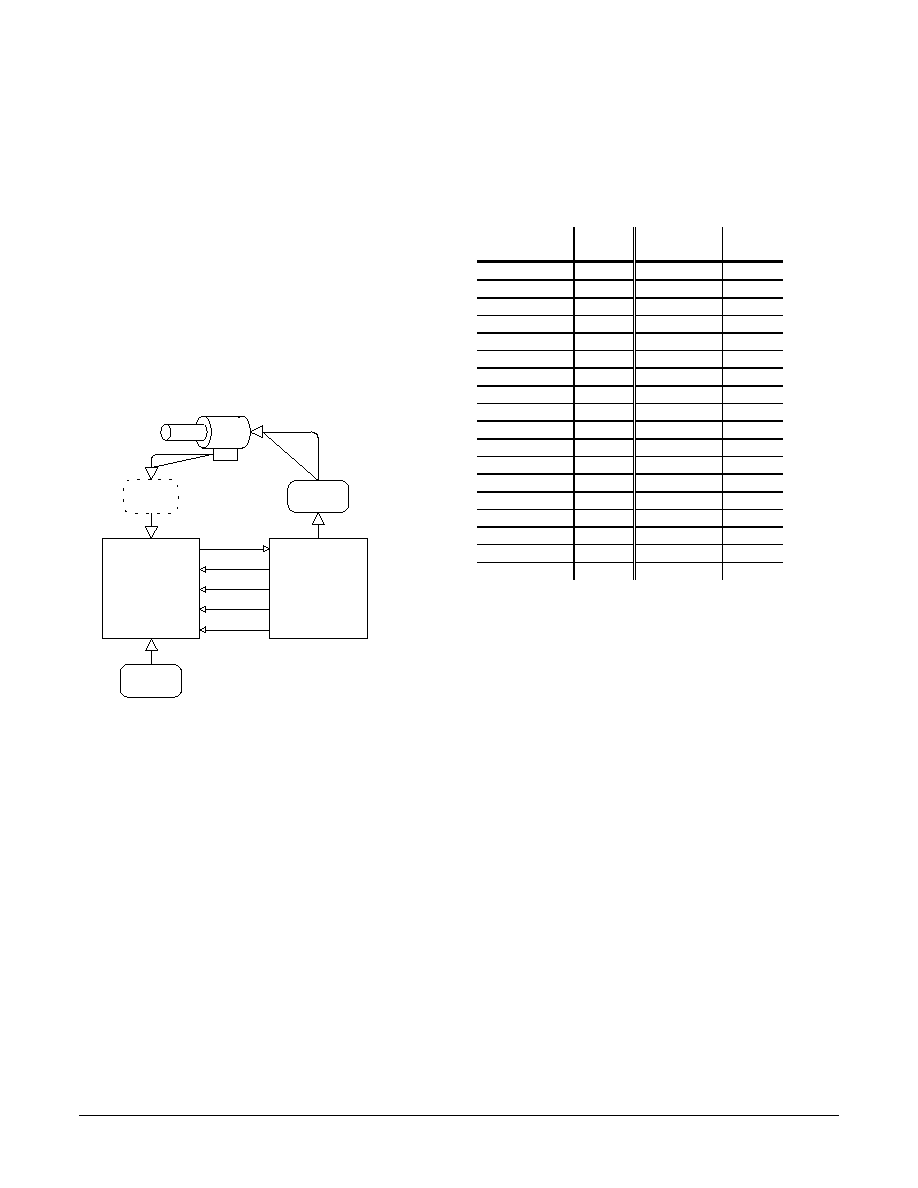
The following figure shows a typical system block diagram, along with
the pin connections between the I/O chip and the CP chip.
Encoder
(1-2 axis)
Host
Processor
CP
I/O
Data4-11
I/OAddr0-3
I/OWrite
I/OCntrl0-3
ClkOut
Amplifier
(1-2 axis)
Motor
(2 axis)
The CP and I/O chips function together as one integrated motion
processor. The major components connected to the chip set are the
optional encoder (2, or 1 axes), the motor amplifier (2, or 1 axes), and
the host processor.
The encoder signals are input to the I/O chip in quadrature format. Two
signals encode the position, and an optional index signal contains a
once-per-rotation locating signal.
The chipset's motor output signals are connected to the motor amplifier.
Two types of output are provided; PWM (pulse width modulation), and
DAC-compatible signals used with an external DAC (digital to analog
converter). In addition 2-phase as well as 3-phase stepping motors are
supported. Because the output signals are in microstepping format, two
phased signals are provided per axis, with the relative phasing of the
two signals depending on the motor type (2-phase or 3-phase).
The host processor is interfaced via an 8-bit bi-directional bus and
various control signals. Host communication is coordinated by a
ready/busy signal, which indicates when communication is allowed.
Interconnections between the two chips consist of a data bus and
various control and synchronization signals. The following table
summarizes the signals that must be interconnected for the chipset to
function properly. For each listed signal the I/O chip pin on the left side
of the table is directly connected to the pin to the right.
I/O Chip Signal
Name
I/O Chip
Pin
CP Chip
Signal Name
CP Chip
Pin
CPData4
18
Data4
50
CPData5
5
Data5
49
CPData6
6
Data6
46
CPData7
7
Data7
43
CPData8
8
Data8
40
CPData9
17
Data8
39
CPData10
3
Data10
36
CPData11
1
Data11
35
CPAddr0
68
I/OAddr0
28
CPAddr1
27
I/OAddr1
9
CPAddr2
29
I/OAddr2
6
CPAddr3
12
I/OAddr3
5
CPCntr0
20
I/OCntr0
16
CPCntr1
36
I/OCntr1
18
CPCntr2
22
I/OCntr2
68
CPCntr3
63
I/OCntr3
67
CPWrite
2
I/OWrite
15
CPClk
46
ClkOut
19
For a complete description of all pins see the 'Pin Descriptions'
section of this manual.
Absolute Maximum Ratings
Unless otherwise stated, all electrical specifications are for both
the I/O and CP chips.
Storage Temperature, Ts.....................-55 deg. C to +150 deg. C
Supply Voltage, Vcc.............................-0.3 V to +7.0 V
Power Dissipation, Pd..........................650 mW (I/O and CP
combined)
Operating Ratings
Operating Temperature, Ta .................0 deg. C to +70 deg. C*
Nominal Clock Frequency, Fclk ...........25.0 Mhz
Supply Voltage, Vcc.............................4.75 V to 5.25 V
* Industrial and Military operating ranges also available. Contact your
PMD representative for more information

5
DC Electrical Characteristics
(Vcc and Ta per operating ratings, Fclk = 25.0 Mhz)
Symbol
Parameter
Min.
Max.
Units
Conditions
Vcc
Supply Voltage
4.75
5.25
V
Idd
Supply Current
100
mA
open outputs
Input Voltages
Vih
Logic 1 input voltage
2.0
Vcc + 0.3
V
Vil
Logic 0 input voltage
-0.3
0.8
V
Vihclk
Logic 1 voltage for clock pin
(ClkIn)
3.0
Vcc+0.3
V
Vihreset
Logic 1 voltage for reset pin
(reset)
4.0
Vcc+0.3
V
Output Voltages
Voh
Logic 1 Output Voltage
2.4
V
@CP Io = 300 uA
@I/O Io = 4 mA
Vol
Logic 0 Output Voltage
0.33
V
@CP Io = 2 mA
@I/O Io = 4 mA
Iout
Tri-State output leakage current
-20
20
uA
0 < Vout < Vcc
Iin
Input current
-50
50
uA
0 < Vi < Vcc
Iinclk
Input current ClkIn
-20
20
uA
0 < Vi < Vcc
AC Electrical Characteristics
(see reference timing diagrams)
(Vcc and Ta per operating ratings; Fclk = 25.0 Mhz)
(~ character indicates active low signal)
Timing Interval
T#
Min.
Max.
Units
Encoder and Index Pulse Timing
Motor-Phase Pulse Width
T1
1.6
uS
Dwell Time Per State
T2
0.8
uS
Index Pulse Setup and Hold
(relative to Quad A and Quad B low)
T3
0
uS
Reset Timing
Stable Power to Reset
0.25
Sec
Reset Low Pulse Width
1.0
uS
Clock Timing
Clock Frequency (Fclk)
6.7
25.6
Mhz
Clock Pulse Width
T4
19.5
75 (note 2)
nS
Clock Period
T5
39
149 (note 2)
nS