Document Outline
- Main Menu
- 8-bit µC Products
- Search
- Web
Preliminary W77E468
8 BIT MICROCONTROLLER
Publication Release Date: January 1999
- 1 - Revision A1
Table of Contents--
GENERAL DESCRIPTION .............................................................................................................. 2
FEATURES................................................................................................................................... 2
PIN CONFIGURATION.................................................................................................................... 3
BLOCK DIAGRAM ......................................................................................................................... 4
PIN DESCRIPTION ........................................................................................................................ 5
FUNCTIONAL DESCRIPTION.......................................................................................................... 6
PROGRAMMABLE TIMERS/COUNTERS .......................................................................................54
TIMED ACCESS PROTECTION .....................................................................................................71
ON-CHIP FLASH ROM CHARACTERISTICS ...................................................................................72
ABSOLUTE MAXIMUM RATINGS...................................................................................................76
DC ELECTRICAL CHARACTERISTICS ..........................................................................................76
AC ELECTRICAL CHARACTERISTICS ...........................................................................................78
EXTERNAL CLOCK CHARACTERISTICS ........................................................................................78
AC SPECIFICATION ..................................................................................................................78
MOVX CHARACTERISTICS USING STRECH MEMORY CYCLES .................................................79
TYPICAL APPLICATION CIRCUITS ................................................................................................82
Using External ROM and RAM....................................................................................................82
PACKAGE DIMENSIONS ..............................................................................................................83
100-pin QFP..............................................................................................................................83
Preliminary W77E468
- 2 -
GENERAL DESCRIPTION
The W77E468 is a fast 8051 compatible microcontroller with a redesigned processor core without
wasted clock and memory cycles. As a result, it executes every 8051 instruction faster than the original
8051 for the same crystal speed. Typically, the instruction executing time of W77E468 is 1.5 to 3 times
faster then that of traditional 8051, depending on the type of instruction. In general, the overall
performance is about 2.5 times better than the original for the same crystal speed. Giving the same
throughput with lower clock speed, power consumption has been improved. Consequently, the W77E468
is a fully static CMOS design; it can also be operated at a lower crystal clock. The W77E468 contains
32KB flash Multiple-Time Programmable Flash ROM, and provides the separate address and data bus
that does not require an external latch device for multiplexing low byte addresses. The W77E468 also
support on-chip 1KB SRAM without external memory component and glue logic, saving more I/O pins for
users application usage if they use on-chip SRAM instead of external SRAM.
FEATURES
∑
8-bit CMOS microcontroller
∑
High speed architecture of 4 clocks/machine cycle runs up to 40 MHz
∑
Pin compatible with standard 80C52
∑
Instruction-set compatible with MCS-51
∑
Six 8-bit I/O Ports and one 4-bit I/O Port
∑
Three 16-bit Timers
∑
12 interrupt sources with two levels of priority
∑
On-chip oscillator and clock circuitry
∑
Two enhanced full duplex serial ports
∑
32 KB flash Multiple-Time Programmable Flash ROM
∑
256 bytes scratch-pad RAM
∑
1 KB on-chip SRAM for MOVX instruction
∑
Programmable Watchdog Timer
∑
Dual 16-bit Data Pointers
∑
Hardware/Software optional variable access cycle to external RAM/peripherals
∑
Packages:
-
QFP 100: W77E468F-25/40
Preliminary W77E468
Publication Release Date: January 1999
- 3 - Revision A1
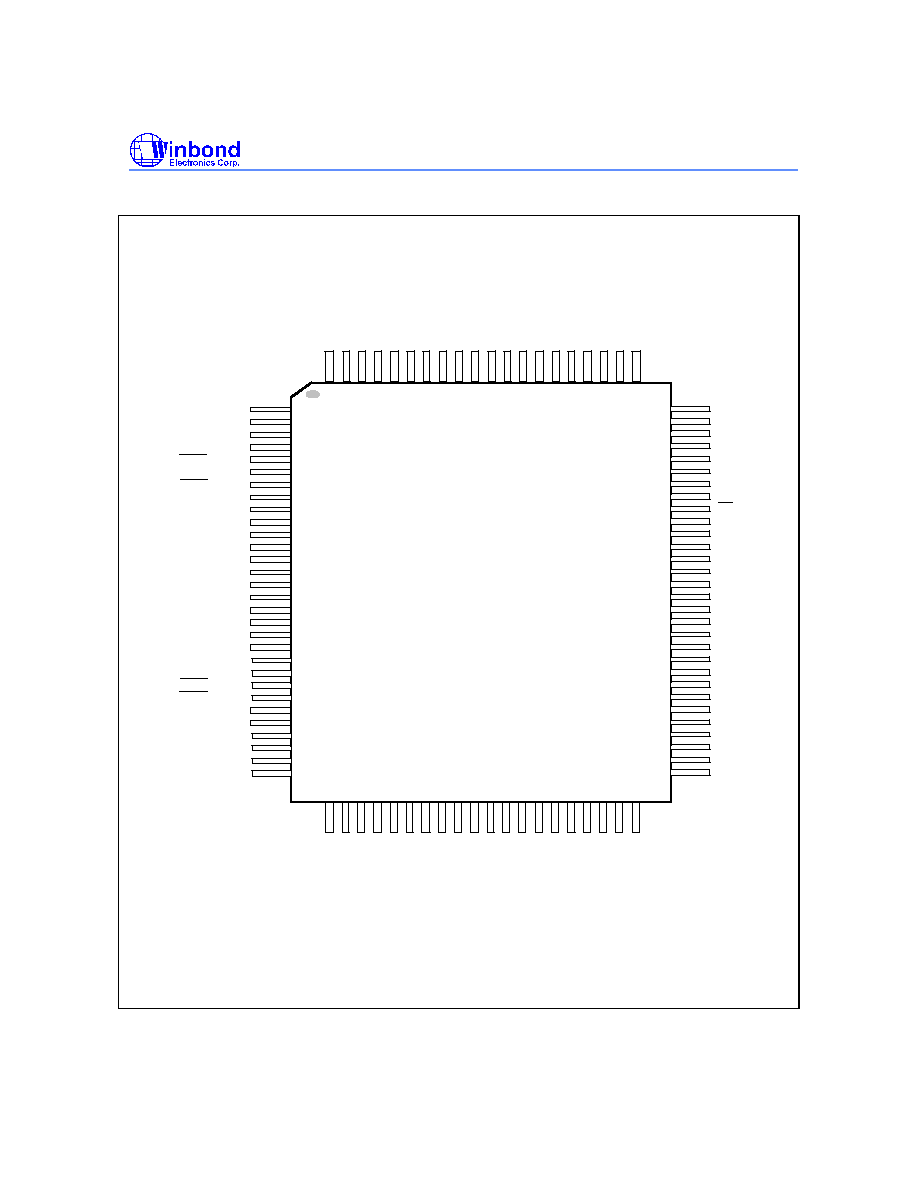
PIN CONFIGURATION
4
5
6
7
8
9
10
11
12
13
14
15
16
17
1
2
3
18
19
9
0
9
8
9
9
20
21
22
23
24
3
1
3
3
3
4
3
5
3
6
3
7
3
8
3
9
4
0
51
52
53
54
55
56
57
58
59
60
61
62
63
64
25
26
27
28
29
30
4
1
4
2
4
3
4
4
4
5
4
6
4
7
4
8
4
9
5
0
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
8
1
8
2
8
3
8
4
8
5
8
6
8
7
8
8
8
9
9
1
9
2
9
3
9
4
9
5
9
6
9
7
1
0
0
100-PIN
QFP
W77E468
T2EX,P1.1
RXD1,P1.2
TXD1,P1.3
INT2,P1.4
INT3,P1.5
INT4,P1.6
INT5,P1.7
RST
P4.0
P4.2
P4.1
P4.3
P4.4
P4.5
P4.6
P4.7
VDD
VDD
RXD,P3.0
TXD,P3.1
INT0,P3.2
INT1,P3.3
T0,P3.4
T1,P3.5
P3.6
P3.7
XTAL2
XTAL1
P2.1
P2.2
P2.3
P2.4
P2.5
P2.6
P2.7
A7
A6
A5
A1
A0
VSS
VSS
ALE
NC
A4
A3
A2
VSS
VDD
EA
P0.7
P0.6
P0.5
P0.4
P0.3
P0.2
P0.1
P0.0
T
2
,
P
1
.
0
N
C
P
5
.
7
P
5
.
6
P
5
.
5
P
5
.
4
P
5
.
3
P
5
.
2
P
5
.
1
P
5
.
0
D
7
D
6
D
5
D
4
D
3
D
2
D
1
D
0
V
D
D
V
D
D
V
S
S
V
S
S
/
R
D
/
W
R
/
P
S
E
N
N
C
N
C
P
6
.
3
P
6
.
2
P
6
.
1
P
6
.
0
,
/
W
A
I
T
A
1
5
A
1
4
A
1
3
A
1
2
A
1
1
A
1
0
A
9
A
8
P
2
.
0
3
2
VDD
VDD
Preliminary W77E468
- 4 -
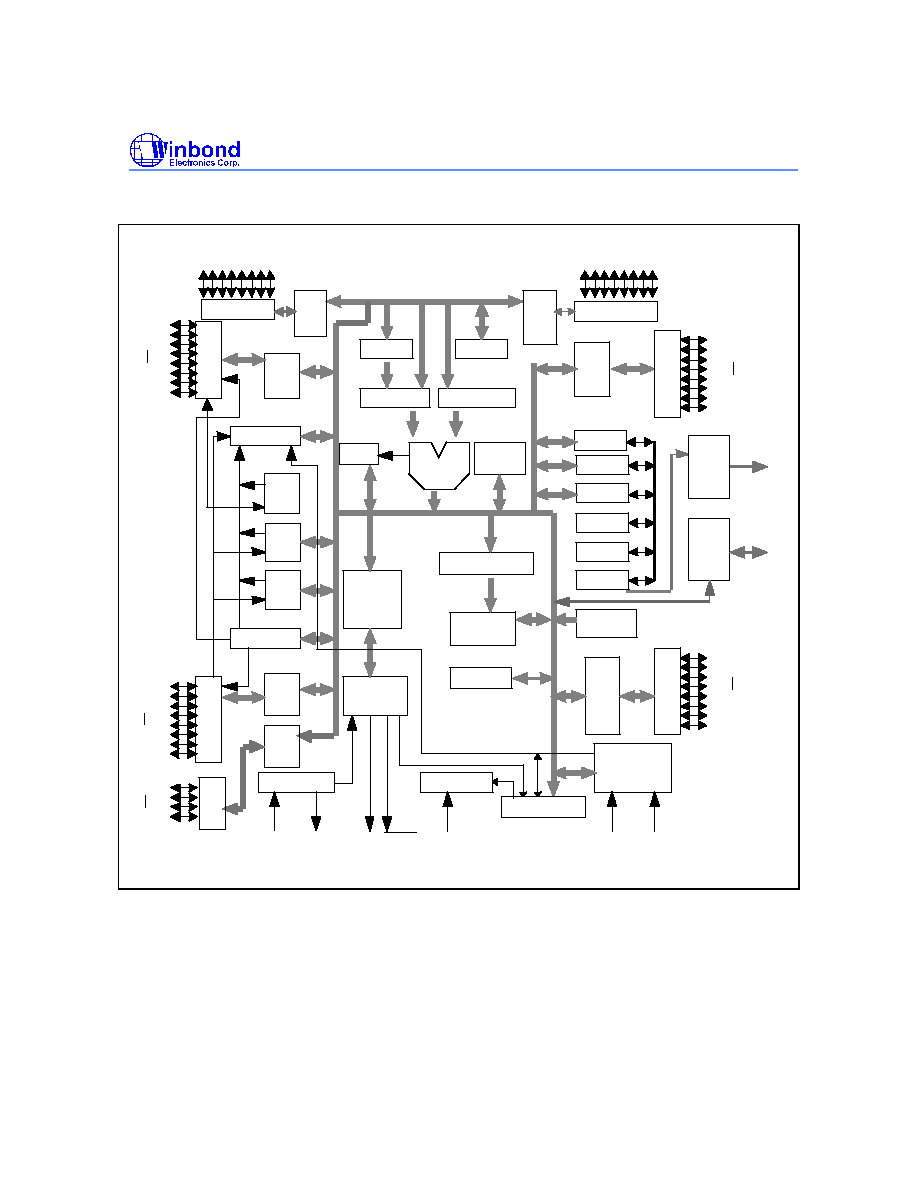
BLOCK DIAGRAM
P3.0
P3.7
P1.0
P1.7
ALU
Port 0
Latch
Port 1
Latch
Timer
1
Timer
0
Port
1
2 UARTs
XTAL1
PSEN
ALE
GND
V
CC
RST
XTAL2
Oscillator
Interrupt
PSW
Instruction
Decoder
&
Sequencer
Reset Block
Bus & clock
Controller
32KB ROM
SFR RAM Address
Power control
&
Power monitor
256 bytes
RAM & SFR
Stack
Pointer
B
Addr. Reg.
Incrementor
PC
Temp Reg.
DPTR 1
T2 Register
T1 Register
ACC
Port 3
Latch
Port
3
Port
0
P0.0
P0.7
Port 2
Latch
Port
2
P2.0
P2.7
Timer
2
1KB SRAM
DPTR
Watchdog Timer
Addr.
Bus
Data
Bus
A0-A15
D0-D7
Port 4
Latch
Port 4
P4.0 - P4.7
Port
5
Latch
Port 5
P5.0 - P5.7
Port 6
Latch
Port
6
P6.0
P6.3
Preliminary W77E468
Publication Release Date: January 1999
- 5 - Revision A1
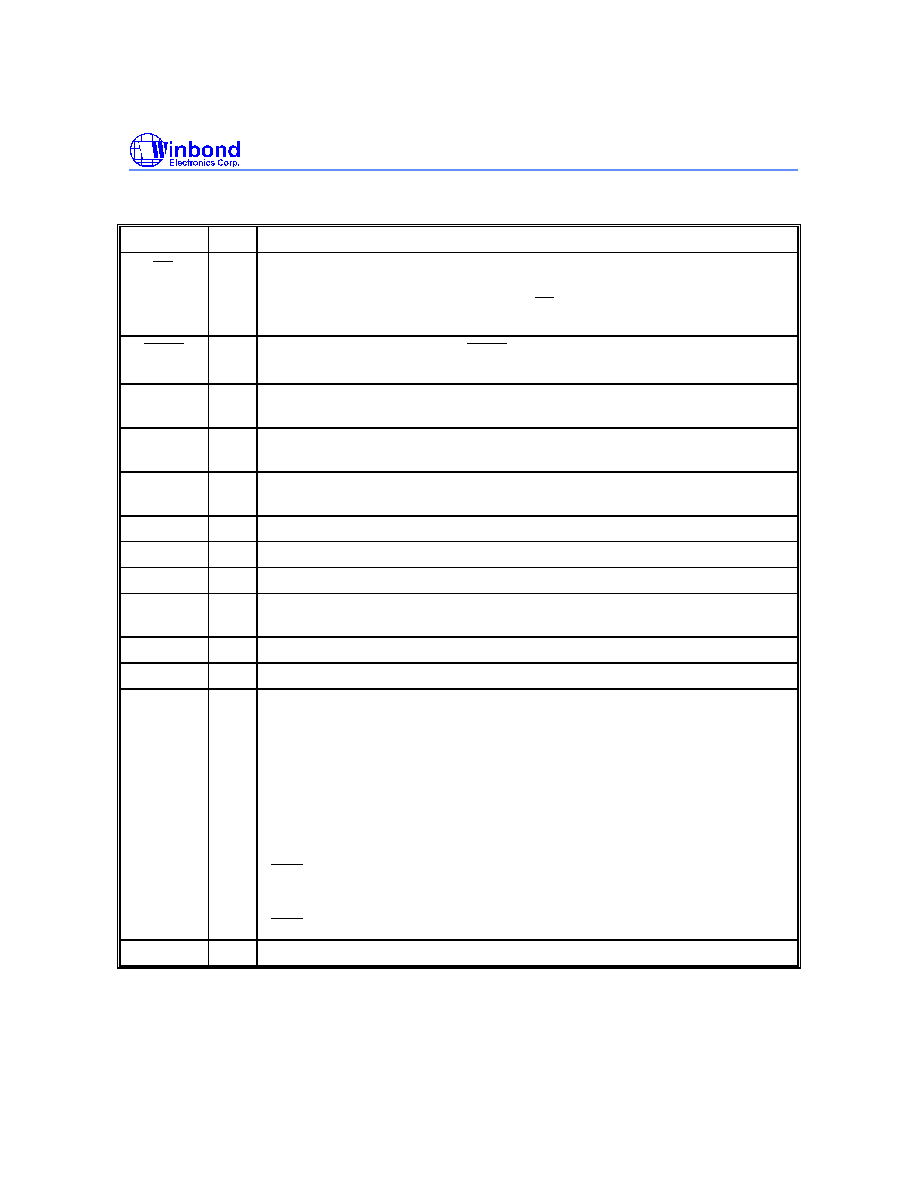
PIN DESCRIPTION
SYMBOL TYPE
DESCRIPTIONS
EA
I
EXTERNAL ACCESS ENABLE: This pin forces the processor to execute out of
external ROM. It should be kept high to access internal ROM. The ROM address
and data will not be present on the bus if
EA
pin is high and the program counter
is within 32 KB area. Otherwise they will be present on the bus.
PSEN
O
PROGRAM STORE ENABLE:
PSEN
pin always emits pulses during access to
internal/external ROM.
ALE
O ADDRESS LATCH ENABLE: ALE is used to enable the address latch that
separates the address from the data on Port 0.
RST
I L
RESET: A high on this pin for two machine cycles while the oscillator is running
resets the device.
XTAL1
I
CRYSTAL1: This is the crystal oscillator input. This pin may be driven by an
external clock.
XTAL2
O
CRYSTAL2: This is the crystal oscillator output. It is the inversion of XTAL1.
V
SS
I
GROUND: Ground potential.
V
DD
I
POWER SUPPLY: Supply voltage for operation.
A0
-
A15
O
ADDRESS BUS: This bus dedicates program/data address output during access
to external ROM, on-chip ROM and external RAM.
D0
-
D7
I
DATA BUS: This bus is used to read/write external memory or peripherals.
P0.0
-
P0.7
I/O PORT 0: Port 0 is an open-drain bi-directional I/O port.
P1.0
-
P1.7
I/O PORT 1: Port 1 is a bi-directional I/O port with internal pull-ups. The bits have
alternate functions which are described below:
T2(P1.0): Timer/Counter 2 external count input
T2EX(P1.1): Timer/Counter 2 Reload/Capture/Direction control
RXD1(P1.2): Serial port 2 RXD
TXD1(p1.3): Serial port 2 TXD
INT2(P1.4): External Interrupt 2
INT3
(P1.5): External Interrupt 3
INT4(P1.6): External Interrupt 4
INT5
(P1.7): External Interrupt 5
P2.0
-
P2.7
I/O PORT 2: Port 2 is a bi-directional I/O port with internal pull-ups.
Preliminary W77E468
- 6 -
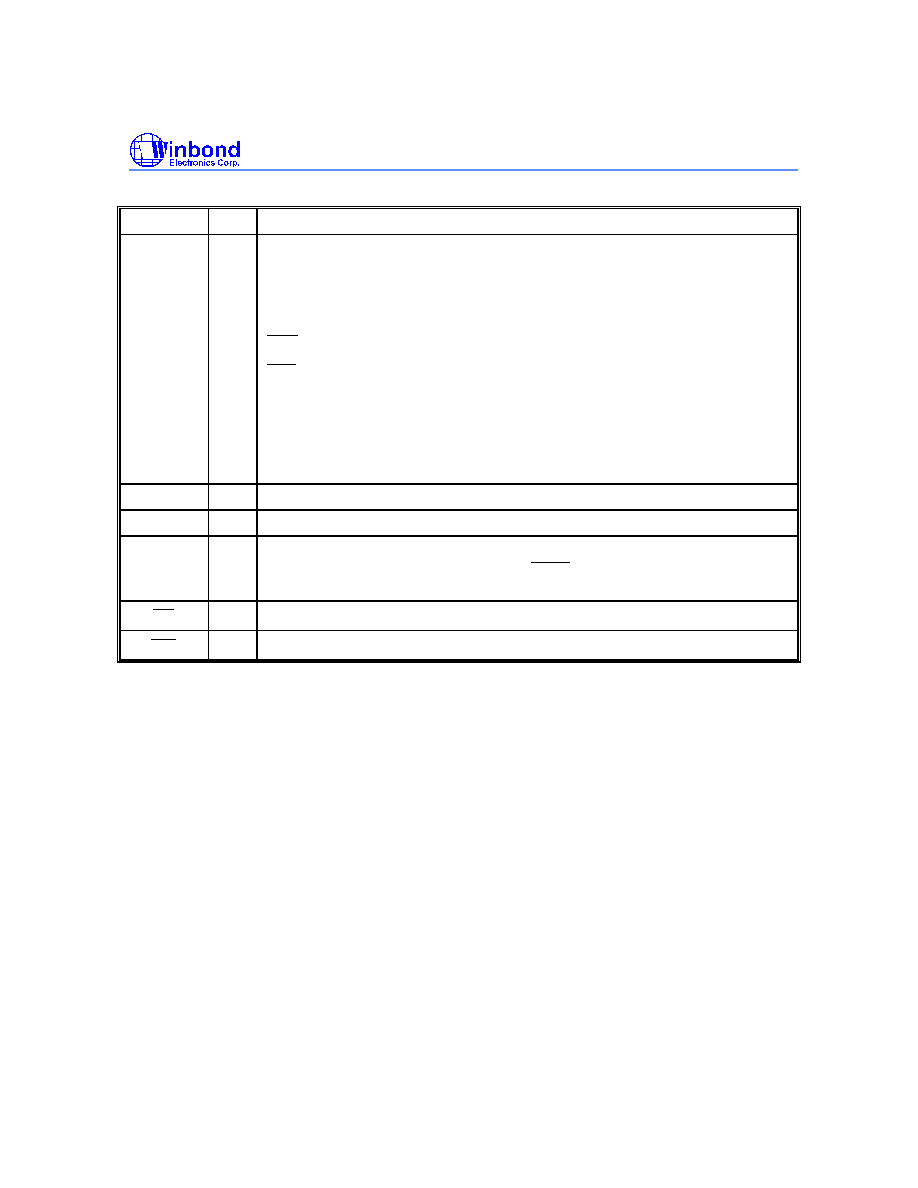
Pin Description, continued
SYMBOL TYPE
DESCRIPTIONS
P3.0
-
P3.7
I/O PORT 3: Port 3 is a bi-directional I/O port with internal pull-ups. All bits have
alternate functions, which are described below:
RXD(P3.0) : Serial Port 0 input
TXD(P3.1) : Serial Port 0 output
INT0
(P3.2) : External Interrupt 0
INT1
(P3.3) : External Interrupt 1
T0(P3.4) : Timer 0 External Input
T1(P3.5) : Timer 1 External Input
P3.6 : General purpose I/O
P3.7 : General purpose I/O
P4.0
-
P4.7
I/O PORT 4: functions as a 8-bit bi-directional I/O port but not bit-addressable.
P5.0
-
P5.7
I/O
PORT 5: functions as a 8-bit bi-directional I/O port but not bit-addressable.
P6.0
-
P6.3
I/O PORT 6: functions as a 4-bit bi-directional I/O port but not bit-addressable. The
P6.0 also provides the alternate function
WAIT
which is the wait state control
signal.
RD
O
READ STROBE: indicates external data memory read strobe.
WR
O
WRITE STROBE: indicates external data memory write strobe.
* Note: TYPE I: input, O: output, I/O: bi-directional.
FUNCTIONAL DESCRIPTION
The W77E468 is 8052 pin compatible and instruction set compatible. It includes the resources of the
standard 8052 such as four 8-bit I/O Ports, three 16-bit timer/counters, full duplex serial port and
interrupt sources with two priority levels.
The W77E468 features a faster running and better performance 8-bit CPU with a redesigned core
processor without wasted clock and memory cycles. it improves the performance not just by running at
high frequency but also by reducing the machine cycle duration from the standard 8052 period of twelve
clocks to four clock cycles for the majority of instructions. This improves performance by an average of
1.5 to 3 times. The W77E468 also provides dual Data Pointers (DPTRs) to speed up block data memory
transfers. It can also adjust the duration of the MOVX instruction (access to off-chip data memory)
between two machine cycles and nine machine cycles. This flexibility allows the W77E468 to work
efficiently with both fast and slow RAMs and peripheral devices. In addition, the W77E468 contains on-
chip 1KB MOVX SRAM, the address of which is between 0000H and 03FFH. It only can be accessed by
MOVX instruction; this on-chip SRAM is optional under software control.
Preliminary W77E468
Publication Release Date: January 1999
- 7 - Revision A1
The W77E468 is an 8052 compatible device that gives the user the features of the original 8052 device,
but with improved speed and power consumption characteristics. It has the same instruction set as the
8051 family, with one addition: DEC DPTR (op-code A5H, the DPTR is decreased by 1). While the
original 8051 family was designed to operate at 12 clock periods per machine cycle, the W77E468
operates at a much reduced clock rate of only 4 clock periods per machine cycle. This naturally speeds
up the execution of instructions. Consequently, the W77E468 can run at a higher speed as compared to
the original 8052, even if the same crystal is used. Since the W77E468 is a fully static CMOS design, it
can also be operated at a lower crystal clock, giving the same throughput in terms of instruction
execution, yet reducing the power consumption.
The 4 clocks per machine cycle feature in the W77E468 is responsible for a three-fold increase in
execution speed. The W77E468 has all the standard features of the 8052, and has a few extra
peripherals and features as well.
Seven I/O Ports:
The W77E468 has six 8-bit I/O ports and one 4-bit I/O port, giving a total of 52 lines. Port 0 to Port 3 can
be used as a 8-bit general I/O port with bit-addressable. Port 4 and Port 5 are 8-bit general I/O port
without bit-addressable. Port 6 is a 4-bit general I/O port without bit-addressable. Port 1 to Port 5 have
internal pull-up, Port 0 is open-drain.
Serial I/O:
The W77E468 has two enhanced serial ports that are functionally similar to the serial port of the original
8052 family. However the serial ports on the W77E468 can operate in different modes in order to obtain
timing similarity as well. Note that the serial port 0 can use Timer 1 or 2 as baud rate generator, but the
serial port 1 can only use Timer 1 as baud rate generator. The serial ports have the enhanced features of
Automatic Address recognition and Frame Error detection.
Timers:
The W77E468 has three 16-bit timers that are functionally similar to the timers of the 8052 family. When
used as timers, they can be set to run at either 4 clocks or 12 clocks per count, thus providing the user
with the option of operating in a mode that emulates the timing of the original 8052. The W77E468 has
an additional feature, the watchdog timer. This timer is used as a System Monitor or as a very long time
period timer.
Interrupts:
The Interrupt structure in the W77E468 is slightly different from that of the standard 8052. Due to the
presence of additional features and peripherals, the number of interrupt sources and vectors has been
increased. The W77E468 provides 12 interrupt resources with two priority level, including six external
interrupt sources, timer interrupts, serial I/O interrupts and power-fail interrupt.
Preliminary W77E468
- 8 -
Data Pointers:
The original 8052 had only one 16-bit Data Pointer (DPL, DPH). In the W77E468, there is an additional
16-bit Data Pointer (DPL1, DPH1). This new Data Pointer uses two SFR locations which were unused in
the original 8052. In addition there is an added instruction, DEC DPTR (op-code A5H), which helps in
improving programming flexibility for the user.
Power Management:
Like the standard 80C52, the W77E468 also has IDLE and POWER DOWN modes of operation. The
W77E468 provides a new Economy mode which allow user to switch the internal clock rate divided by
either 4, 64 or 1024. In the IDLE mode, the clock to the CPU core is stopped while the timers, serial
ports and interrupts clock continue to operate. In the POWER DOWN mode, all the clock are stopped
and the chip operation is completely stopped. This is the lowest power consumption state.
On-chip Data SRAM:
The W77E468 has 1K Bytes of data space SRAM which is read/write accessible and is memory
mapped. This on-chip MOVX SRAM is reached by the MOVX instruction. It is not used for executable
program memory. There is no conflict or overlap among the 256 bytes Scratchpad RAM and the 1K
Bytes MOVX SRAM as they use different addressing modes and separate instructions. The on-chip
MOVX SRAM is enabled by setting the DME0 bit in the PMR register. After a reset, the DME0 bit is
cleared such that the on-chip MOVX SRAM is disabled, and all data memory spaces 0000H
-
FFFFH
access to the external memory.
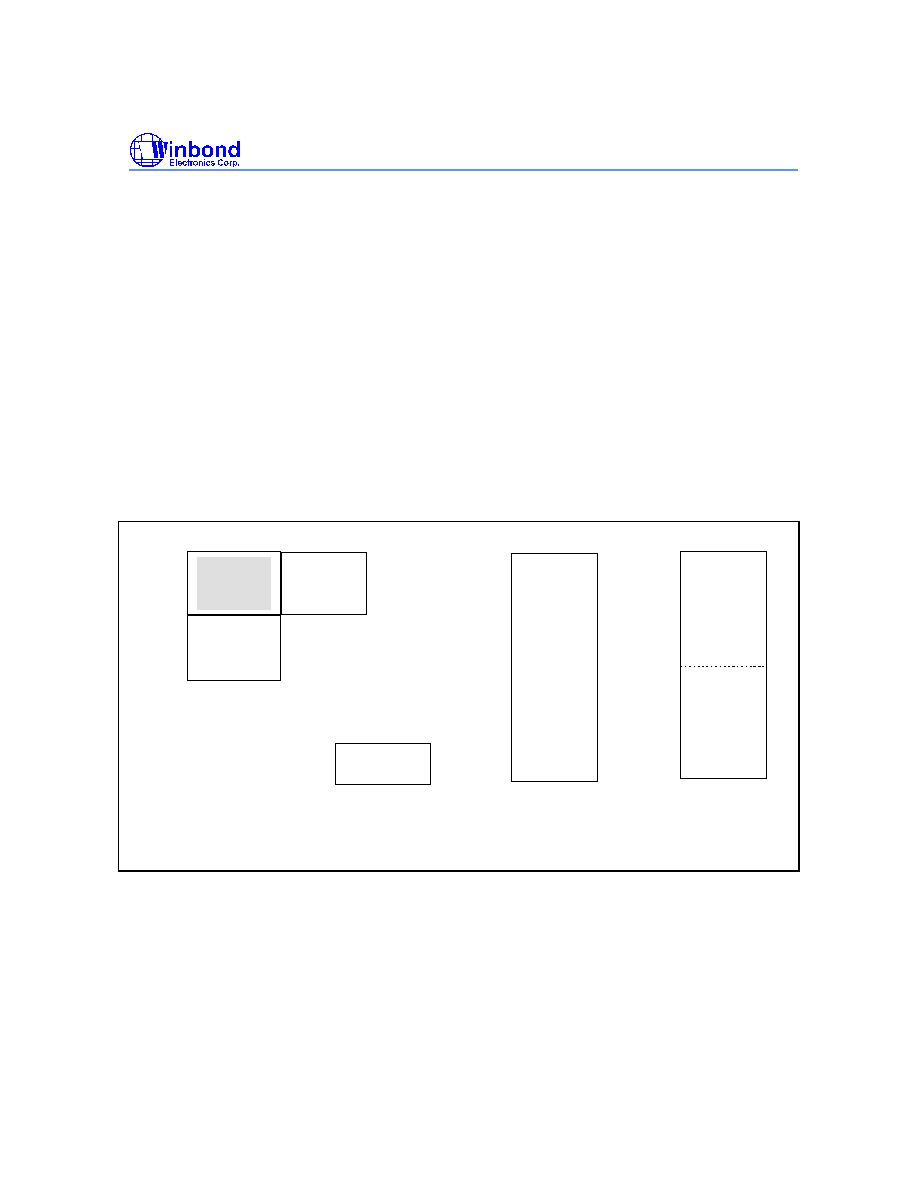
MEMORY ORGANIZATION
The W77E468 separates the memory into two separate sections, the Program Memory and the Data
Memory. The Program Memory is used to store the instruction op-codes, while the Data Memory is used
to store data or for memory mapped devices.
Program Memory:
The Program Memory on the W77E468 can be up to 64Kbytes long. There is also on-chip ROM which
can be used similarly to that of the 8052, except that the ROM size is 32Kbytes. All instructions are
fetched for execution from this memory area. The MOVC instruction can also access this memory
region. Exceeding the maximum address of on-chip ROM will access to the external memory.
Preliminary W77E468
Publication Release Date: January 1999
- 9 - Revision A1
Data Memory:
The W77E468 can access up to 64Kbytes of external Data Memory. This memory region is accessed
by the MOVX instructions. Unlike the 8051 derivatives, the W77E468 contains on-chip 1K bytes MOVX
SRAM of Data Memory, which can only be accessed by MOVX instructions. These 1K bytes of SRAM
are between address 0000H and 03FFH. Access to the on-chip MOVX SRAM is optional under software
control. When enabled by software, any MOVX instruction that uses this area will go to the on-chip
RAM. MOVX addresses greater than 03FFH automatically go to external memory through Port 0 and 2.
When disabled, the 1KB memory area is transparent to the system memory map. Any MOVX directed
to the space between 0000H and FFFFH goes to the expanded bus on A0-A15 and D0-D7. This is the
default condition. In addition, the W77E468 has the standard 256 bytes of on-chip Scratchpad RAM.
This can be accessed either by direct addressing or by indirect addressing. There are also some Special
Function Registers (SFRs), which can only be accessed by direct addressing. Since the Scratchpad
RAM is only 256 bytes, it can be used only when data contents are small. In the event that larger data
contents are present, two selections can be used. One is on-chip MOVX SRAM , the other is the
external Data Memory. The on-chip MOVX SRAM can only be accessed by a MOVX instruction, the
same as that for external Data Memory. However, the on-chip RAM has the fastest access times.
0000h
FFFFh
80h
7Fh
00h
64 K
Bytes
External
Data
Memory
Indirect
Addressing
RAM
Direct &
Indirect
Addressing
RAM
SFRs
Direct
Addressing
only
FFh
FFFFh
0000h
External
Program
Memory
7FFFh
32K Bytes
On-chip
Program
Memory
1K Bytes
On-chip SRAM
0000h
03FFh
Figure 1. Memory Map
Preliminary W77E468
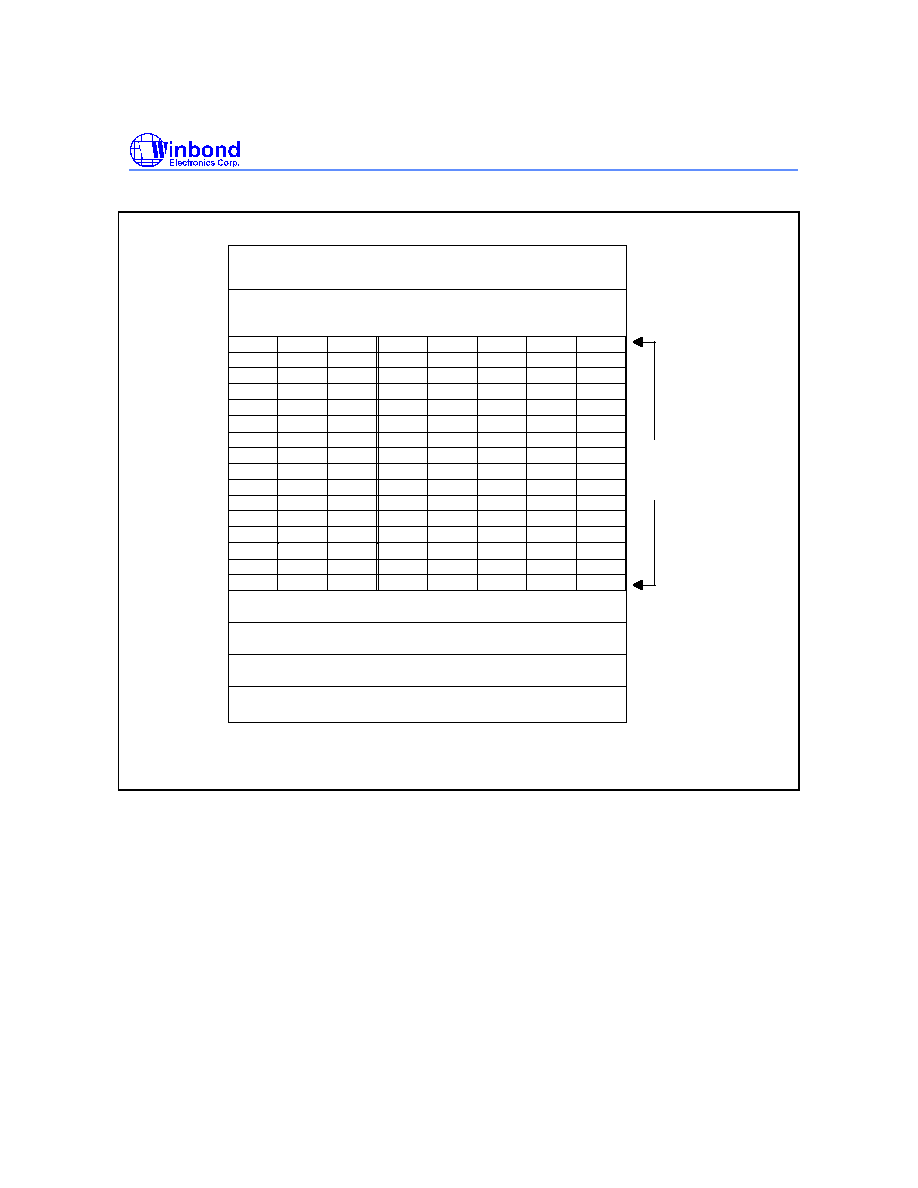
- 10 -
FFh
80h
7Fh
30h
2Fh
2Eh
2Dh
2Ch
2Bh
2Ah
29h
28h
27h
26h
25h
24h
23h
22h
21h
20h
1Fh
18h
17h
10h
0Fh
08h
07h
00h
78
79
7A
7B
7C
7D
7E
7F
70
71
72
73
74
75
76
77
68
69
6A
6B
6C
6D
6E
6F
60
61
62
63
64
65
66
67
58
59
5A
5B
5C
50
51
52
53
54
5D
5E
5F
55
56
57
48
49
4A
4B
4C
4D
4E
4F
40
41
42
43
44
45
46
47
38
39
3A
3B
3C
3D
3E
3F
30
31
32
33
34
35
36
37
28
29
2A
2B
2C
2D
2E
2F
20
21
22
23
24
25
26
27
18
19
1A
1B
1C
1D
1E
1F
10
11
12
13
14
15
16
17
08
09
0A
0B
0C
0D
0E
0F
00
01
02
03
04
05
06
07
Indirect RAM
Direct RAM
Bank 3
Bank 2
Bank 1
Bank 0
Bit Addressable
20H- 2FH
Figure 2. Scratchpad RAM/Register Addressing
Preliminary W77E468
Publication Release Date: January 1999
- 11 - Revision A1
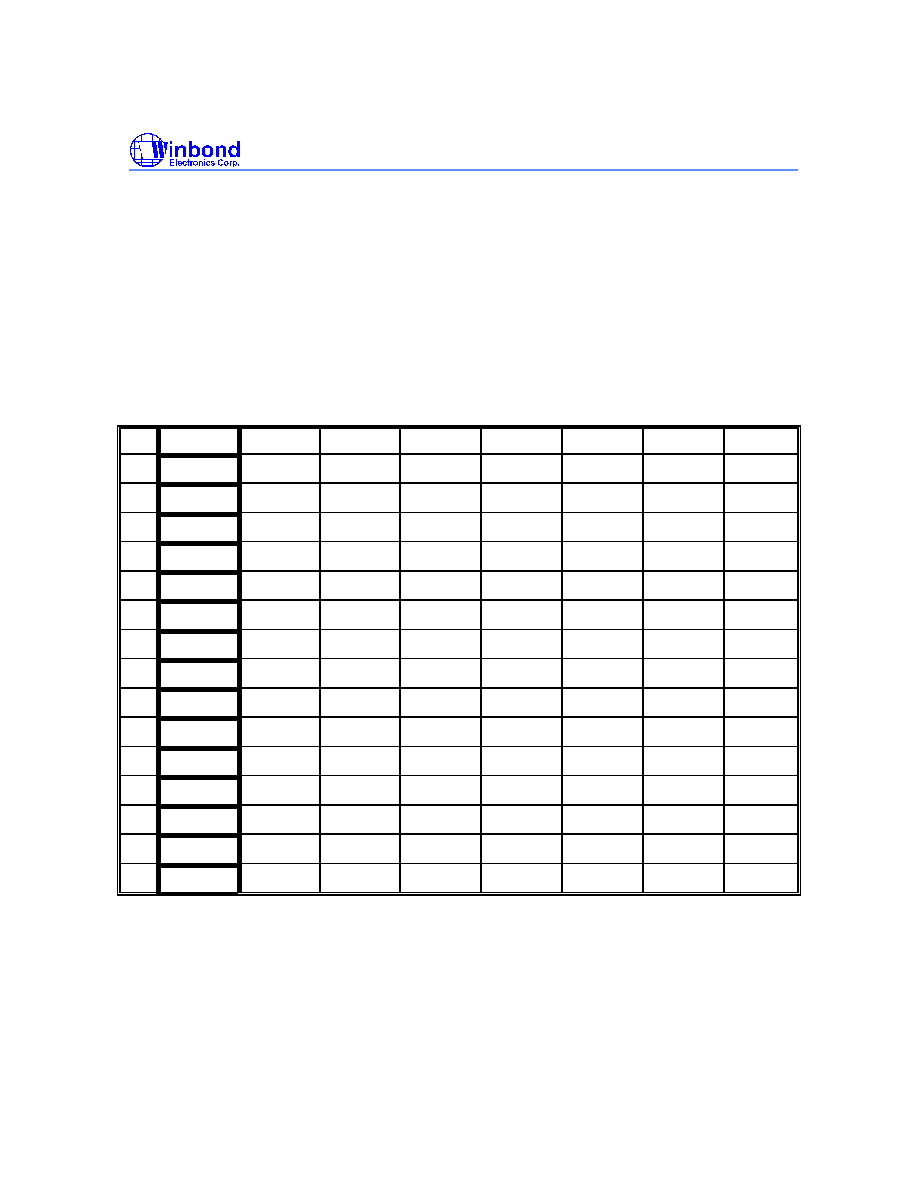
Special Function Registers
The W77E468 uses Special Function Registers (SFRs) to control and monitor peripherals and their
Modes.
The SFRs reside in the register locations 80-FFh and are accessed by direct addressing only. Some of
the SFRs are bit addressable. This is very useful in cases where one wishes to modify a particular bit
without changing the others. The SFRs that are bit addressable are those whose addresses end in 0 or
8. The W77E468 contains all the SFRs present in the standard 8052. However, some additional SFRs
have been added. In some cases unused bits in the original 8052 have been given new functions. The list
of SFRs is as follows. The table is condensed with eight locations per row. Empty locations indicate that
there are no registers at these addresses. When a bit or register is not implemented, it will read high.
Table 1. Special Function Register Location Table
F8
EIP
F0
B
E8
EIE
E0
ACC
D8
WDCON
D0
PSW
C8
T2CON
T2MOD
RCAP2L
RCAP2H
TL2
TH2
C0
SCON1
SBUF1
ROMMAP
PMR
STATUS
TA
B8
IP
SADEN
SADEN1
B0
P3
A8
IE
SADDR
SADDR1
A0
P2
HB
P6
P4
P5
98
SCON0
SBUF
90
P1
EXIF
88
TCON
TMOD
TL0
TL1
TH0
TH1
CKCON
80
P0
SP
DPL
DPH
DPL1
DPH1
DPS
PCON
Note: The SFRs in the column with dark borders are bit-addressable.
Preliminary W77E468
- 12 -
A brief description of the SFRs now follows.
PORT 0
Bit:
7
6
5
4
3
2
1
0
P0.7
P0.6
P0.5
P0.4
P0.3
P0.2
P0.1
P0.0
Mnemonic: P0
Address: 80h
Port 0 is an open-drain bi-directional I/O port.
STACK POINTER
Bit:
7
6
5
4
3
2
1
0
SP.7
SP.6
SP.5
SP.4
SP.3
SP.2
SP.1
SP.0
Mnemonic: SP
Address: 81h
The Stack Pointer stores the Scratchpad RAM address where the stack begins. In other words, it
always points to the top of the stack.
DATA POINTER LOW
Bit:
7
6
5
4
3
2
1
0
DPL.7
DPL.6
DPL.5
DPL.4
DPL.3
DPL.2
DPL.1
DPL.0
Mnemonic: DPL
Address: 82h
This is the low byte of the standard 8052 16-bit data pointer.
DATA POINTER HIGH
Bit:
7
6
5
4
3
2
1
0
DPH.7 DPH.6
DPH.5
DPH.4
DPH.3 DPH.2
DPH.1 DPH.0
Mnemonic: DPH
Address: 83h
This is the high byte of the standard 8052 16-bit data pointer.
DATA POINTER LOW1
Bit:
7
6
5
4
3
2
1
0
DPL1.7 DPL1.6 DPL1.5 DPL1.4 DPL1.3 DPL1.2 DPL1.1 DPL1.0
Mnemonic: DPL1
Address: 84h
Preliminary W77E468
Publication Release Date: January 1999
- 13 - Revision A1
This is the low byte of the new additional 16-bit data pointer that has been added to the W77E468. The
user can switch between DPL, DPH and DPL1, DPH1 simply by setting register DPS = 1. The
instructions that use DPTR will now access DPL1 and DPH1 in place of DPL and DPH. If they are not
required they can be used as conventional register locations by the user.
DATA POINTER HIGH1
Bit:
7
6
5
4
3
2
1
0
DPH1.7 DPH1.6 DPH1.5 DPH1.4 DPH1.3 DPH1.2 DPH1.1 DPH1.0
Mnemonic: DPH1
Address: 85h
This is the high byte of the new additional 16-bit data pointer that has been added to the W77E468. The
user can switch between DPL, DPH and DPL1, DPH1 simply by setting register DPS = 1. The
instructions that use DPTR will now access DPL1 and DPH1 in place of DPL and DPH. If they are not
required they can be used as conventional register locations by the user.
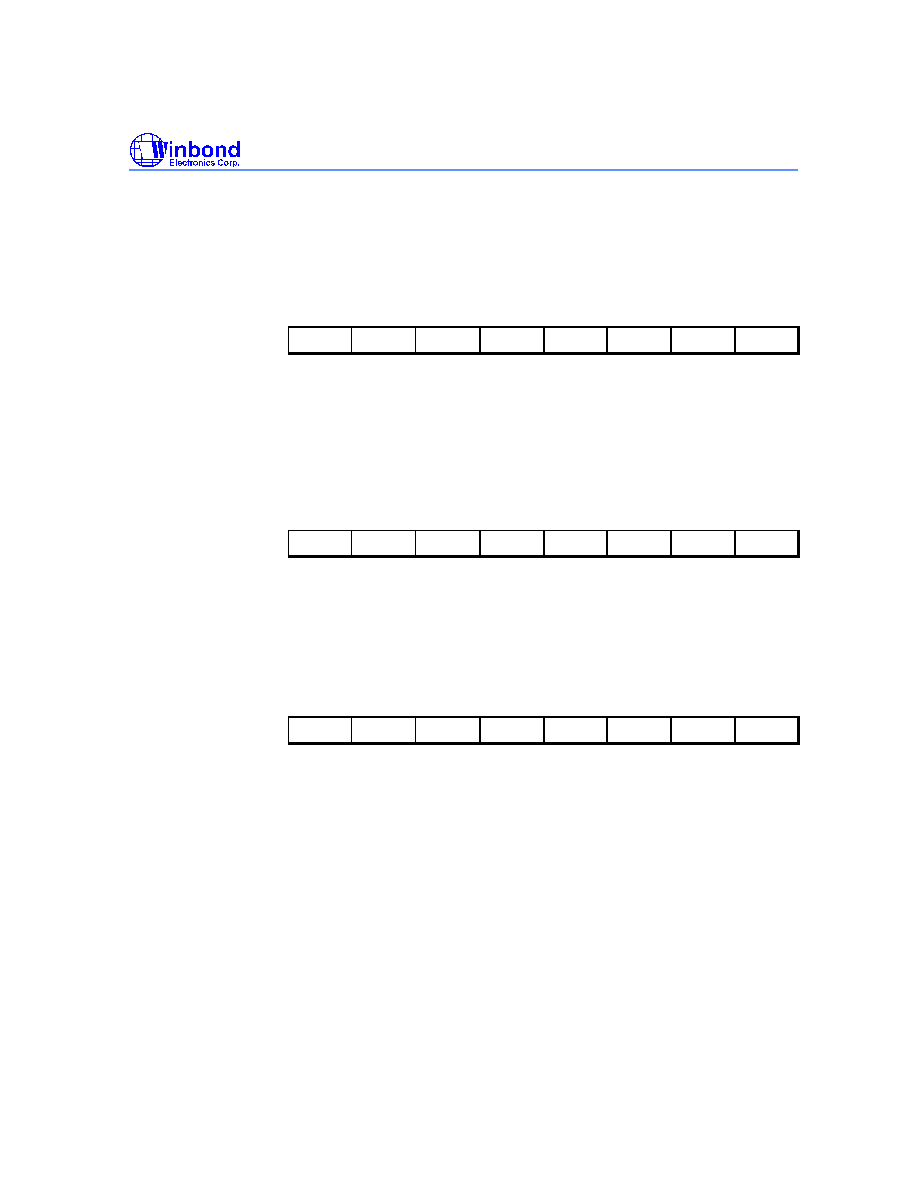
DATA POINTER SELECT
Bit:
7
6
5
4
3
2
1
0
-
-
-
-
-
-
-
DPS.0
Mnemonic: DPS
Address: 86h
DPS.0: This bit is used to select either the DPL,DPH pair or the DPL1,DPH1 pair as the active Data
Pointer. When set to 1, DPL1,DPH1 will be selected, otherwise DPL,DPH will be selected.
DPS.1-7:These bits are reserved, but will read 0.
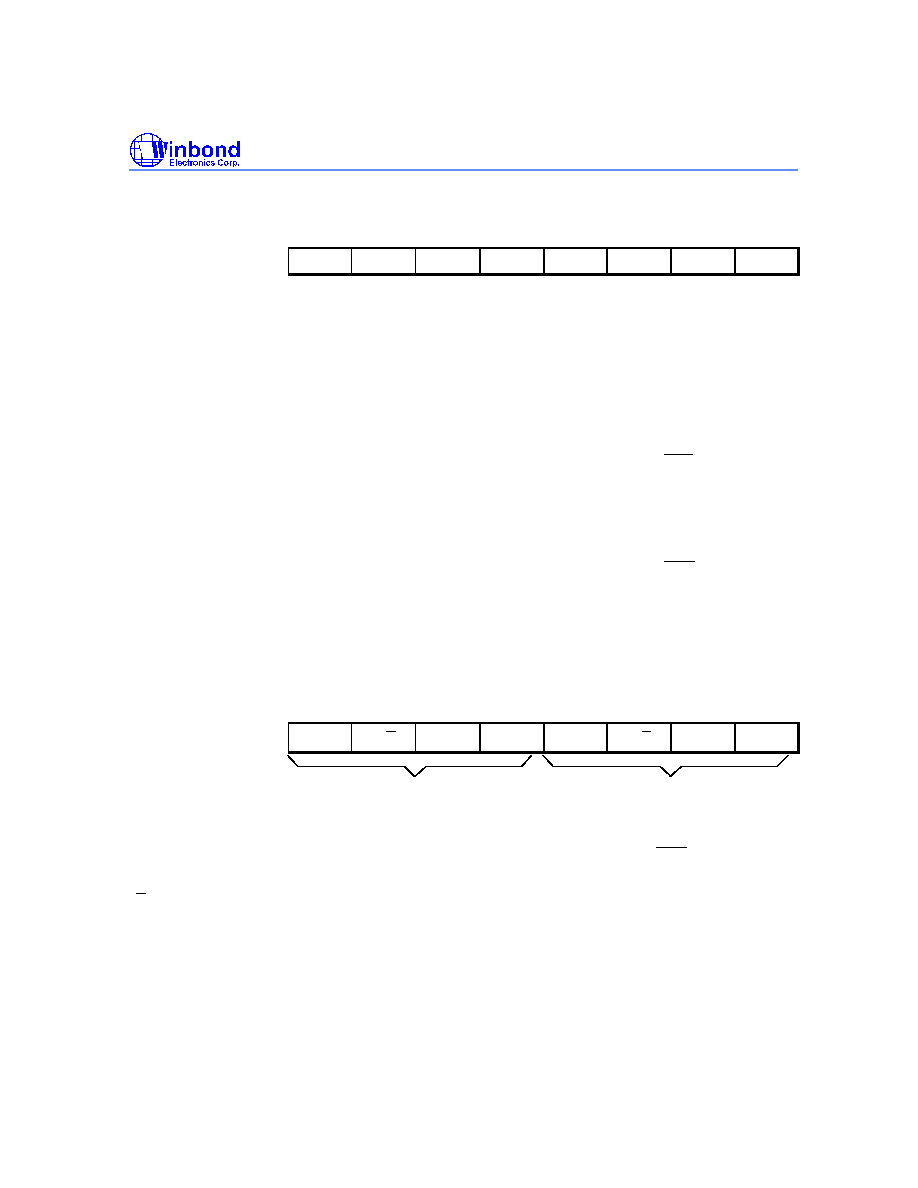
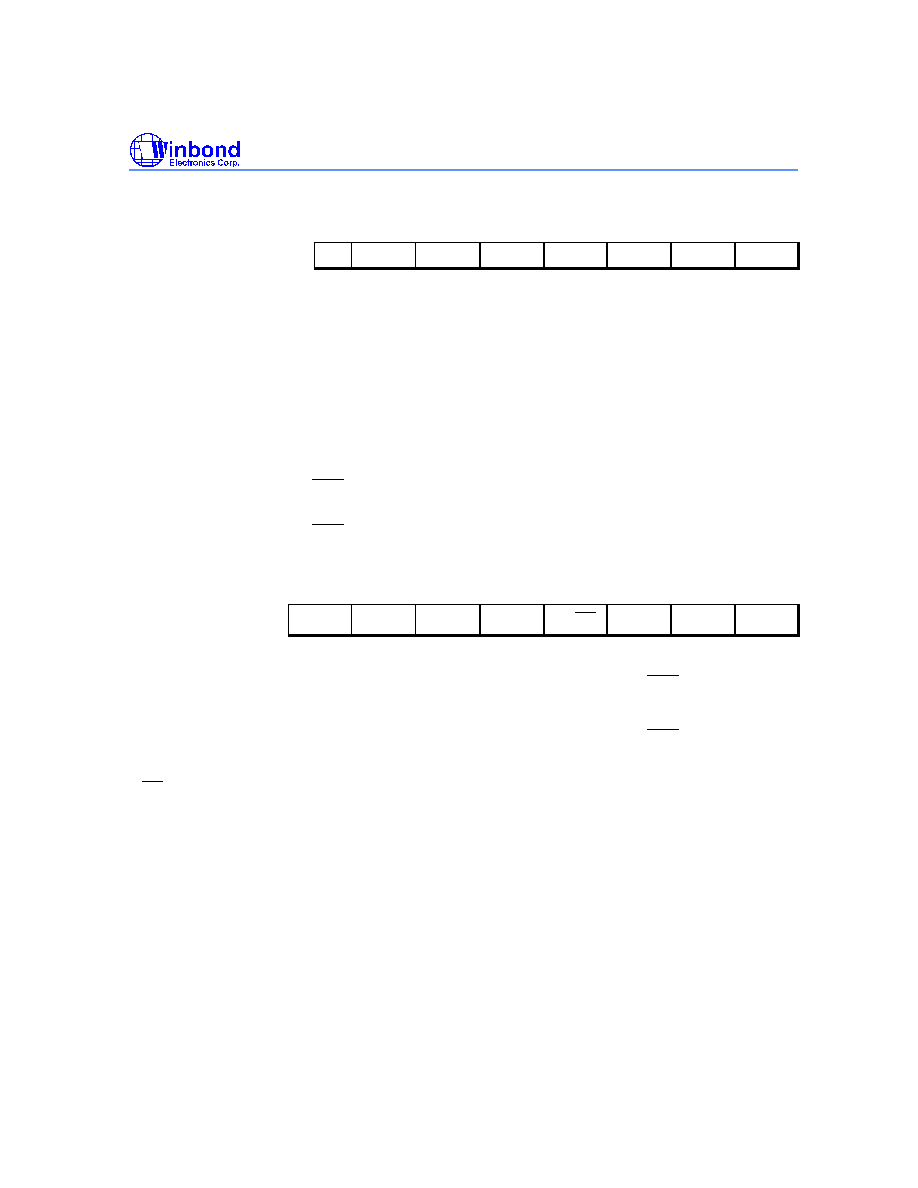
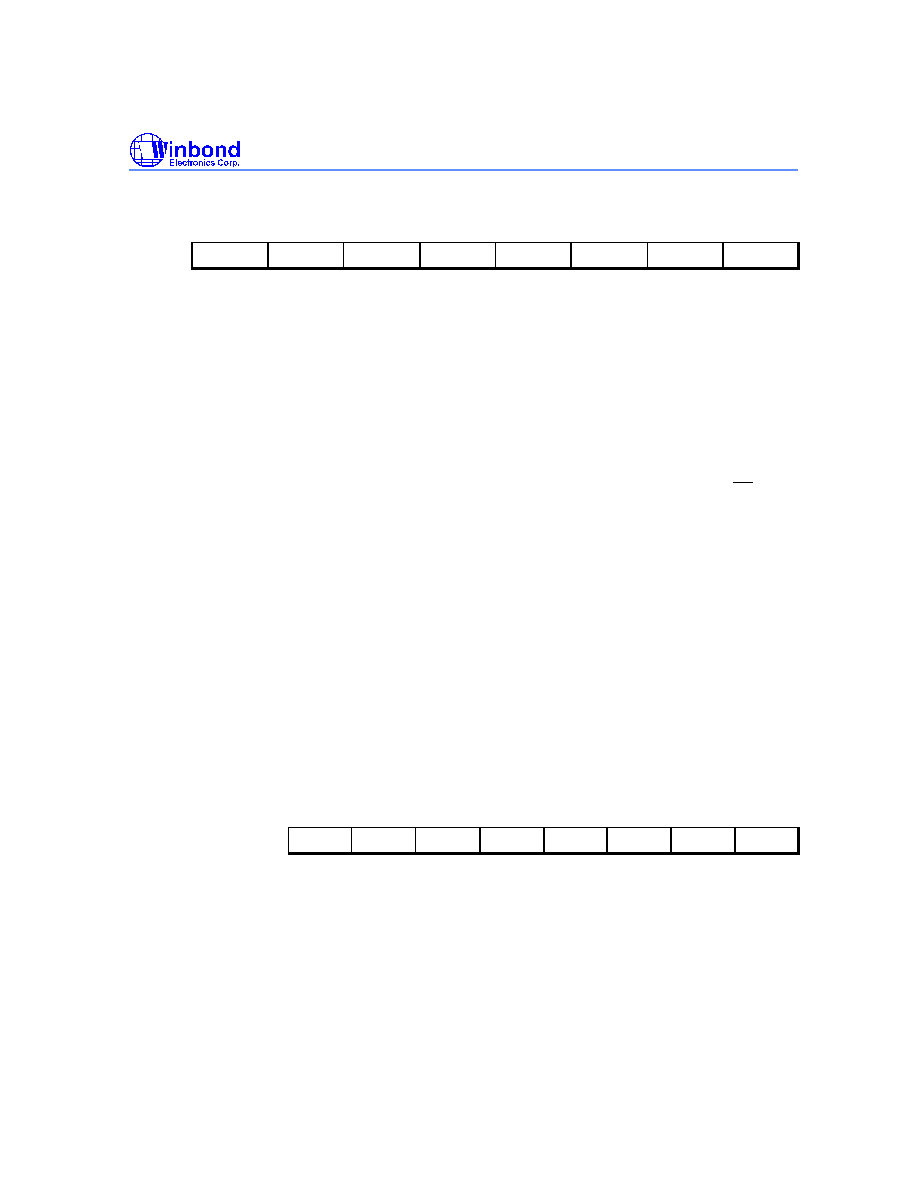
POWER CONTROL
Bit:
7
6
5
4
3
2
1
0
SM0D
SMOD0
-
-
GF1
GF0
PD
IDL
Mnemonic: PCON
Address: 87h
SMOD : This bit doubles the serial port baud rate in mode 1, 2, and 3 when set to 1.
SMOD0: Framing Error Detection Enable: When SMOD0 is set to 1, then SCON.7(SCON1.7)
indicates a Frame Error and acts as the FE(FE_1) flag. When SMOD0 is 0, then
SCON.7(SCON1.7) acts as per the standard 8052 function.
GF1-0: These two bits are general purpose user flags.
PD:
Setting this bit causes the W77E468 to go into the POWER DOWN mode. In this mode all
the clocks are stopped and program execution is frozen.
IDL:
Setting this bit causes the W77E468 to go into the IDLE mode. In this mode the clocks to the
CPU are stopped, so program execution is frozen. But the clock to the serial, timer and
interrupt blocks is not stopped, and these blocks continue operating.
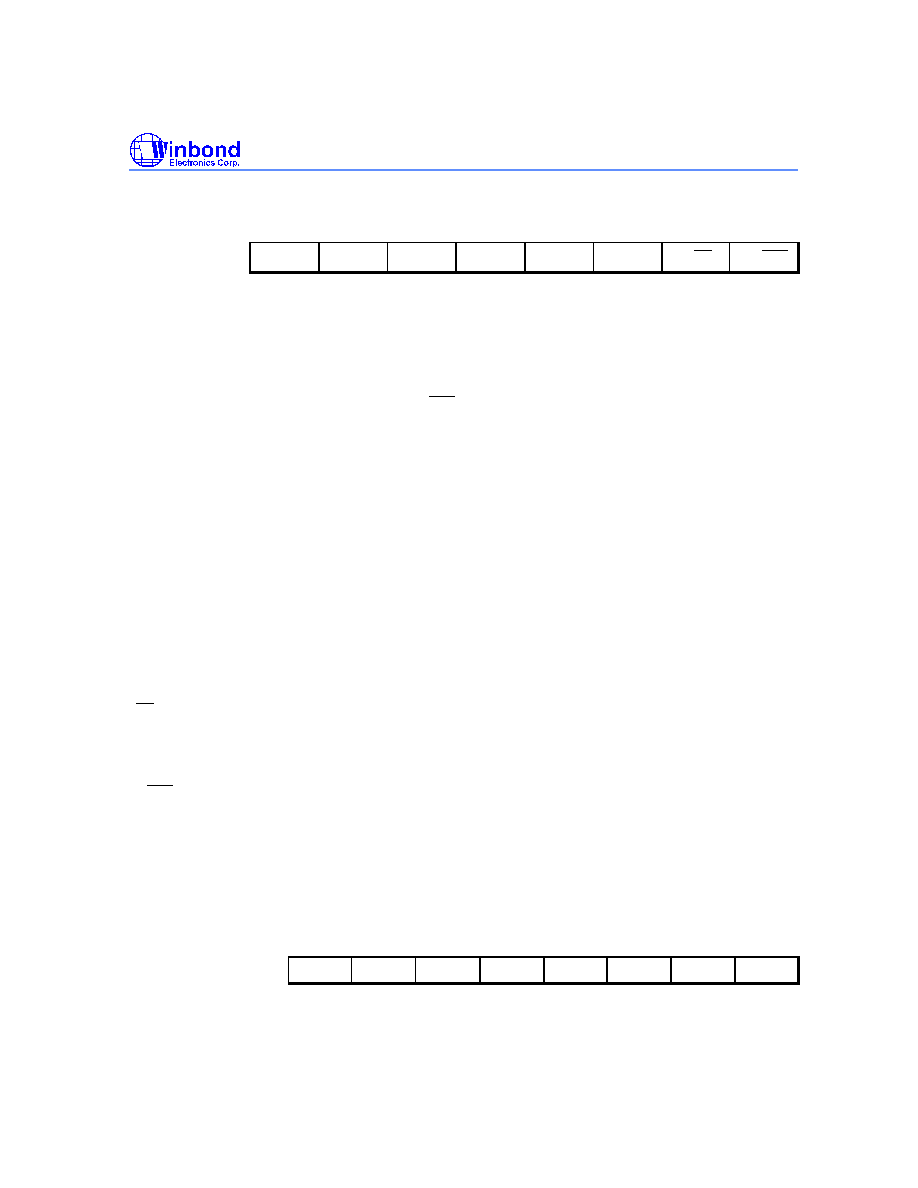
Preliminary W77E468
- 14 -
TIMER CONTROL
Bit:
7
6
5
4
3
2
1
0
TF1
TR1
TF0
TR0
IE1
IT1
IE0
IT0
Mnemonic: TCON
Address: 88h
TF1:
Timer 1 overflow flag: This bit is set when Timer 1 overflows. It is cleared automatically when
the program does a timer 1 interrupt service routine. Software can also set or clear this bit.
TR1:
Timer 1 run control: This bit is set or cleared by software to turn timer/counter on or off.
TF0:
Timer 0 overflow flag: This bit is set when Timer 0 overflows. It is cleared automatically when
the program does a timer 0 interrupt service routine. Software can also set or clear this bit.
TR0:
Timer 0 run control: This bit is set or cleared by software to turn timer/counter on or off.
IE1:
Interrupt 1 edge detect: Set by hardware when an edge/level is detected on
INT1
. This bit is
cleared by hardware when the service routine is vectored to only if the interrupt was edge
triggered. Otherwise it follows the pin.
IT1:
Interrupt 1 type control: Set/cleared by software to specify falling edge/ low level triggered
external inputs.
IE0:
Interrupt 0 edge detect: Set by hardware when an edge/level is detected on
INT0
. This bit is
cleared by hardware when the service routine is vectored to only if the interrupt was edge
triggered. Otherwise it follows the pin.
IT0:
Interrupt 0 type control: Set/cleared by software to specify falling edge/ low level triggered
external inputs.
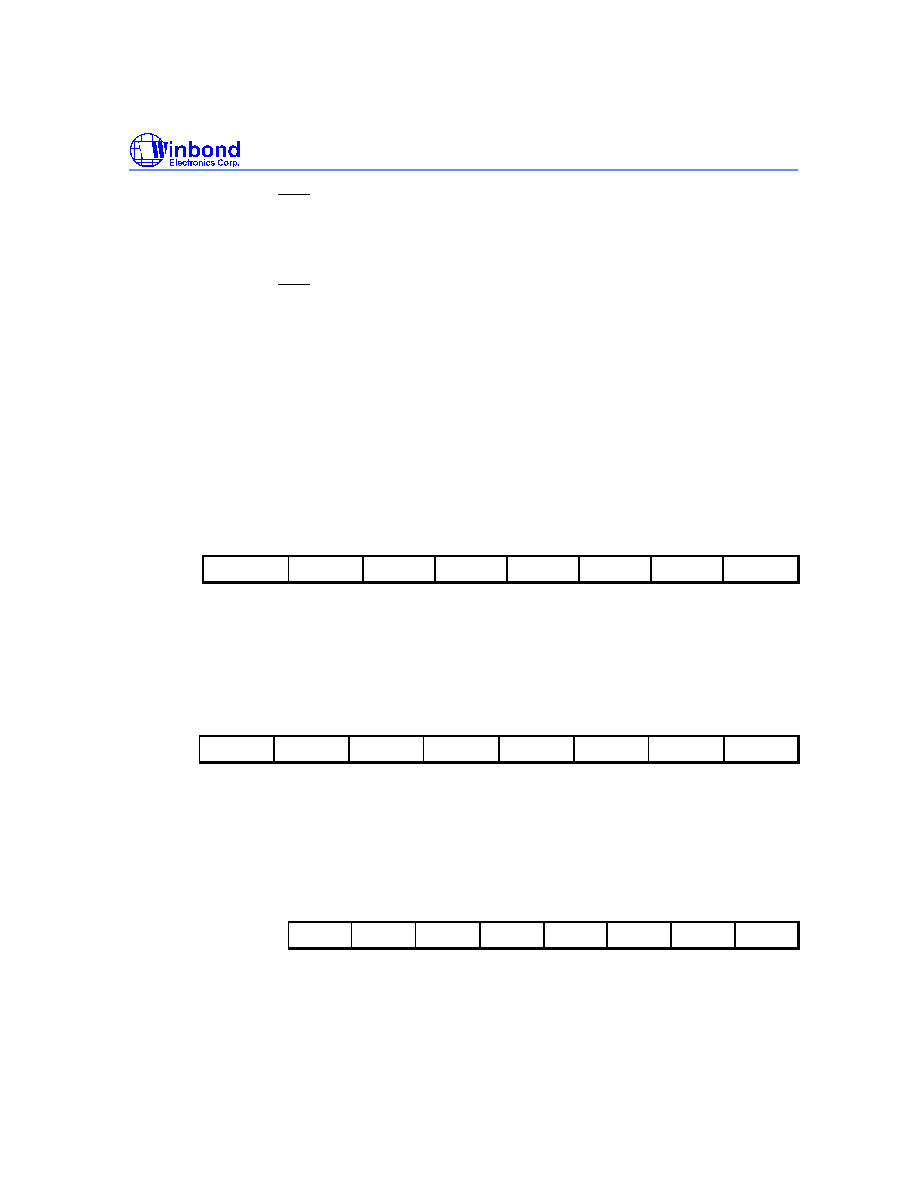
TIMER MODE CONTROL
Bit:
7
6
5
4
3
2
1
0
GATE
C/
T
M1
M0
GATE
C/
T
M1
M0
TIMER1
TIMER0
Mnemonic: TMOD
Address: 89h
GATE: Gating control: When this bit is set, Timer/counter x is enabled only while
INTx
pin is high
and TRx control bit is set. When cleared, Timer x is enabled whenever TRx control bit is set.
C/
T
: Timer or Counter Select: When cleared, the timer is incremented by internal clocks. When
set, the timer counts high-to-low edges of the Tx pin.
Preliminary W77E468
Publication Release Date: January 1999
- 15 - Revision A1
M1, M0: Mode Select bits:
M1
M0
Mode
0
0
Mode 0: 8-bits with 5-bit prescale.
0
1
Mode 1: 18-bits, no prescale.
1
0
Mode 2: 8-bits with auto-reload from Thx
1
1
Mode 3: (Timer 0) TL0 is an 8-bit timer/counter controlled by the
standard Timer 0 control bits. TH0 is a 8-bit timer only controlled by Timer 1
control bits. (Timer 1) Timer/counter is stopped.
TIMER 0 LSB
Bit:
7
6
5
4
3
2
1
0
TL0.7
TL0.6
TL0.5
TL0.4
TL0.3
TL0.2
TL0.1
TL0.0
Mnemonic: TL0
Address: 8Ah
TL0.7-0:Timer 0 LSB
TIMER 1 LSB
Bit:
7
6
5
4
3
2
1
0
TL1.7
TL1.6
TL1.5
TL1.4
TL1.3
TL1.2
TL1.1
TL1.0
Mnemonic: TL1
Address: 8Bh
TL1.7-0:Timer 1 LSB
TIMER 0 MSB
Bit:
7
6
5
4
3
2
1
0
TH0.7
TH0.6
TH0.5
TH0.4
TH0.3
TH0.2
TH0.1
TH0.0
Mnemonic: TH0
Address: 8Ch
TH0.7-0:Timer 0 MSB
TIMER 1 MSB
Bit:
7
6
5
4
3
2
1
0
TH1.7
TH1.6
TH1.5
TH1.4
TH1.3
TH1.2
TH1.1
TH1.0
Mnemonic: TH1
Address: 8Dh
TH1.7-0:Timer 1 MSB
Preliminary W77E468
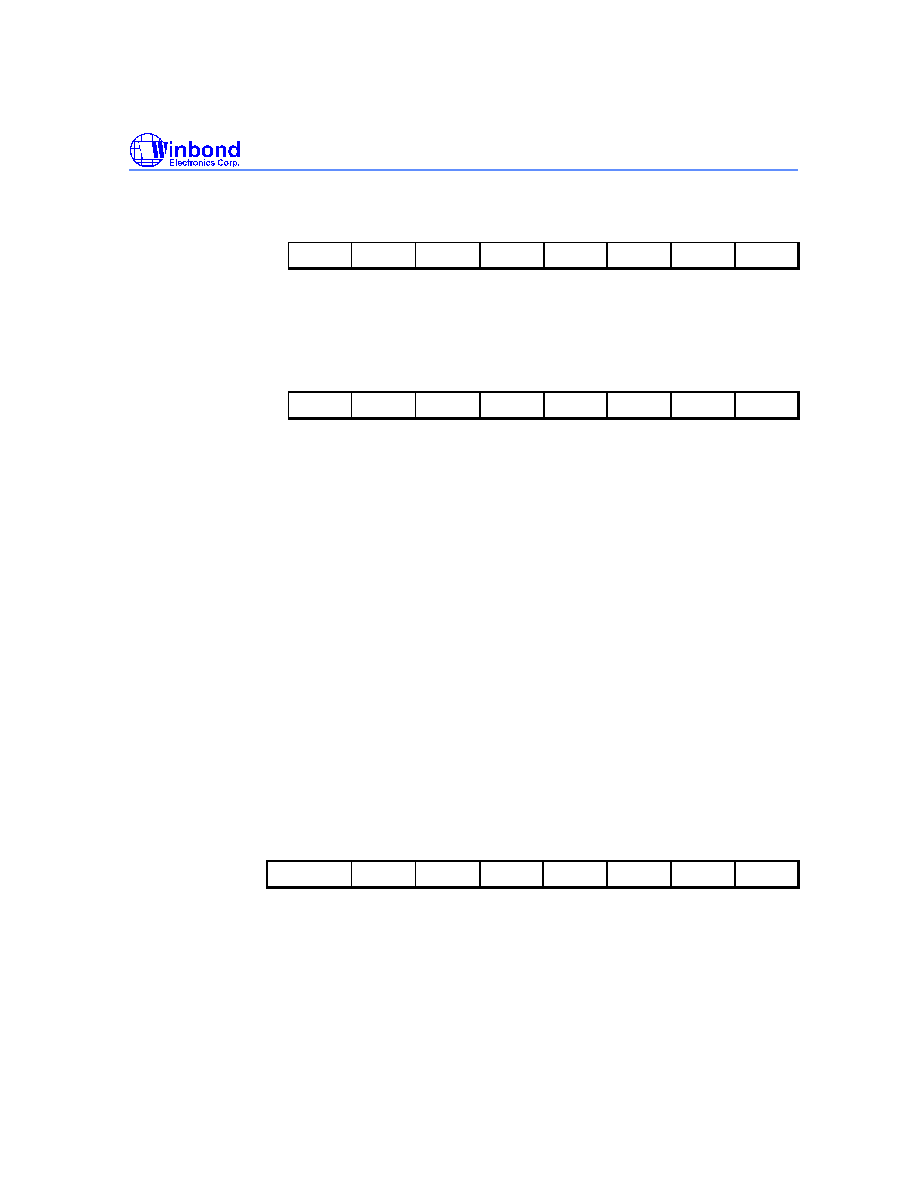
- 16 -
CLOCK CONTROL
Bit:
7
6
5
4
3
2
1
0
WD1
WD0
T2M
T1M
T0M
MD2
MD1
MD0
Mnemonic: CKCON
Address: 8Eh
WD1-0: Watchdog timer mode select bits: These bits determine the time-out period for the watchdog
timer. In all four time-out options the reset time-out is 512 clocks more than the interrupt time-
out period.
WD1
WD0
Interrupt time-out
Reset time-out
0
0
2
17
2
17
+ 512
0
1
2
20
2
20
+ 512
1
0
2
23
2
23
+ 512
1
1
2
26
2
26
+ 512
T2M: Timer 2 clock select: When T2M is set to 1, timer 2 uses a divide by 4 clock, and when set to
0 it uses a divide by 12 clock.
T1M: Timer 1 clock select: When T1M is set to 1, timer 1 uses a divide by 4 clock, and when set to
0 it uses a divide by 12 clock.
T0M: Timer 0 clock select: When T0M is set to 1, timer 0 uses a divide by 4 clock, and when set to
0 it uses a divide by 12 clock.
MD2-0: Stretch MOVX select bits: These three bits are used to select the stretch value for the MOVX
instruction. Using a variable MOVX length enables the user to access slower external memory
devices or peripherals without the need for external circuits. The
RD
or
WR
strobe will be
stretched by the selected interval. When accessing the on-chip SRAM, the MOVX instruction
is always in 2 machine cycles regardless of the stretch setting. By default, the stretch has
value of 1. If the user needs faster accessing, then a stretch value of 0 should be selected.
MD2
MD1
MD0
Stretch value
MOVX duration
0
0
0
0
2 machine cycles
0
0
1
1
3 machine cycles (Default)
0
1
0
2
4 machine cycles
0
1
1
3
5 machine cycles
1
0
0
4
6 machine cycles
1
0
1
5
7 machine cycles
1
1
0
6
8 machine cycles
1
1
1
7
9 machine cycles
Preliminary W77E468
Publication Release Date: January 1999
- 17 - Revision A1
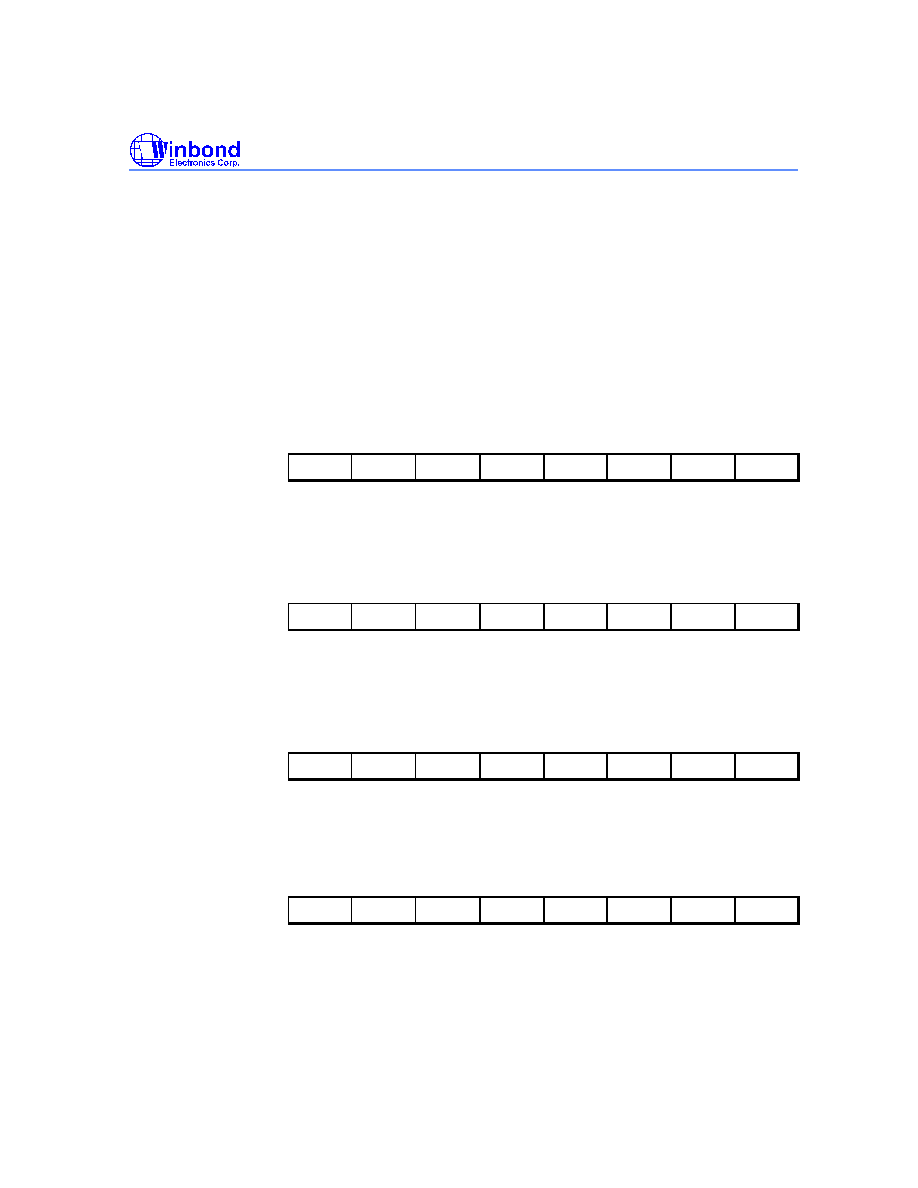
PORT 1
Bit:
7
6
5
4
3
2
1
0
P1.7 P1.6
P1.5
P1.4
P1.3
P1.2
P1.1
P1.0
Mnemonic: P1
Address: 90h
P1.7-0: General purpose I/O port. Most instructions will read the port pins in case of a port read
access, however in case of read-modify-write instructions, the port latch is read. Some pins
also have alternate input or output functions. This alternate functions are described below:
P1.0 : T2
External I/O for Timer/Counter 2
P1.1 : T2EX
Timer/Counter 2 Capture/Reload Trigger
P1.2 : RXD1
Serial Port 1 Receive
P1.3 : TXD1
Serial Port 1 Transmit
P1.4 : INT2
External Interrupt 2
P1.5 :
INT3
External Interrupt 3
P1.6 : INT4
External Interrupt 4
P1.7 :
INT5
External Interrupt 5
EXTERNAL INTERRUPT FLAG
Bit:
7
6
5
4
3
2
1
0
IE5
IE4
IE3
IE2
XT/
RG
RGMD
RGSL
-
Mnemonic: EXIF
Address: 91h
IE5: External Interrupt 5 flag. Set by hardware when a falling edge is detected on
INT5
.
IE4: External Interrupt 4 flag. Set by hardware when a rising edge is detected on INT4.
IE3: External Interrupt 3 flag. Set by hardware when a falling edge is detected on
INT3
.
IE2: External Interrupt 2 flag. Set by hardware when a rising edge is detected on INT2.
XT/
RG
: Crystal/RC Oscillator Select. Setting this bit selects crystal or external clock as system clock
source. Clearing this bit selects the on-chip RC oscillator as clock source. XTUP(STATUS.4)
must be set to 1 and XTOFF (PMR.3) must be cleared before this bit can be set. Attempts to
set this bit without obeying these conditions will be ignored. This bit is set to 1 after a power-
on reset and unchanged by other forms of reset.
RGMD: RC Mode Status. This bit indicates the current clock source of microcontroller. When cleared,
CPU is operating from the external crystal or oscillator. When set, CPU is operating from the
on-chip RC oscillator. This bit is cleared to 0 after a power-on reset and unchanged by other
forms of reset.
Preliminary W77E468
- 18 -
RGSL: RC Oscillator Select. This bit selects the clock source following a resume from Power Down
Mode. Setting this bit allows device operating from RC oscillator when a resume from Power
Down Mode. When this bit is cleared, the device will hold operation until the crystal oscillator
has warmed-up following a resume from Power Down Mode. This bit is cleared to 0 after a
power-on reset and unchanged by other forms of reset.
SERIAL PORT CONTROL
Bit:
7
6
5
4
3
2
1
0
SM0/FE
SM1
SM2
REN
TB8
RB8
TI
RI
Mnemonic: SCON
Address: 98h
SM0/FE: Serial port 0, Mode 0 bit or Framing Error Flag: The SMOD0 bit in PCON SFR determines
whether this bit acts as SM0 or as FE. The operation of SM0 is described below. When used
as FE, this bit will be set to indicate an invalid stop bit. This bit must be manually cleared in
software to clear the FE condition.
SM1: Serial port Mode bit 1:
SM0
SM1
Mode
Description
Length
Baud rate
0
0
0
Synchronous
8
4/12 Tclk
0
1
1
Asynchronous
10
variable
1
0
2
Asynchronous
11
64/32 Tclk
1
1
3
Asynchronous
11
variable
SM2: Multiple processors communication. Setting this bit to 1 enables the multiprocessor
communication feature in mode 2 and 3. In mode 2 or 3, if SM2 is set to 1, then RI will not be
activated if the received 9th data bit (RB8) is 0. In mode 1, if SM2 = 1, then RI will not be
activated if a valid stop bit was not received. In mode 0, the SM2 bit controls the serial port
clock. If set to 0, then the serial port runs at a divide by 12 clock of the oscillator. This gives
compatibility with the standard 8052. When set to 1, the serial clock become divide by 4 of
the oscillator clock. This results in faster synchronous serial communication.
REN: Receive enable: When set to 1 serial reception is enabled, otherwise reception is disabled.
TB8:
This is the 9th bit to be transmitted in modes 2 and 3. This bit is set and cleared by software
as desired.
RB8: In modes 2 and 3 this is the received 9th data bit. In mode 1, if SM2 = 0, RB8 is the stop bit
that was received. In mode 0 it has no function.
TI:
Transmit interrupt flag: This flag is set by hardware at the end of the 8th bit time in mode 0, or
at the beginning of the stop bit in all other modes during serial transmission. This bit must be
cleared by software.
Preliminary W77E468
Publication Release Date: January 1999
- 19 - Revision A1
RI:
Receive interrupt flag: This flag is set by hardware at the end of the 8th bit time in mode 0, or
halfway through the stop bits time in the other modes during serial reception. However the
restrictions of SM2 apply to this bit. This bit can be cleared only by software.
SERIAL DATA BUFFER
Bit:
7
6
5
4
3
2
1
0
SBUF.7 SBUF.6 SBUF.5 SBUF.4 SBUF.3 SBUF.2 SBUF.1 SBUF.0
Mnemonic: SBUF
Address: 99h
SBUF.7-0: Serial data on the serial port 0 is read from or written to this location. It actually consists of
two separate internal 8-bit registers. One is the receive resister, and the other is the
transmit buffer. Any read access gets data from the receive data buffer, while write access
is to the transmit data buffer.
PORT 2
Bit:
7
6
5
4
3
2
1
0
P2.7
P2.6
P2.5
P2.4
P2.3
P2.2
P2.1
P2.0
Mnemonic: P2
Address: A0h
P2.7-0: Port 2 is a bi-directional I/O port with internal pull-ups.
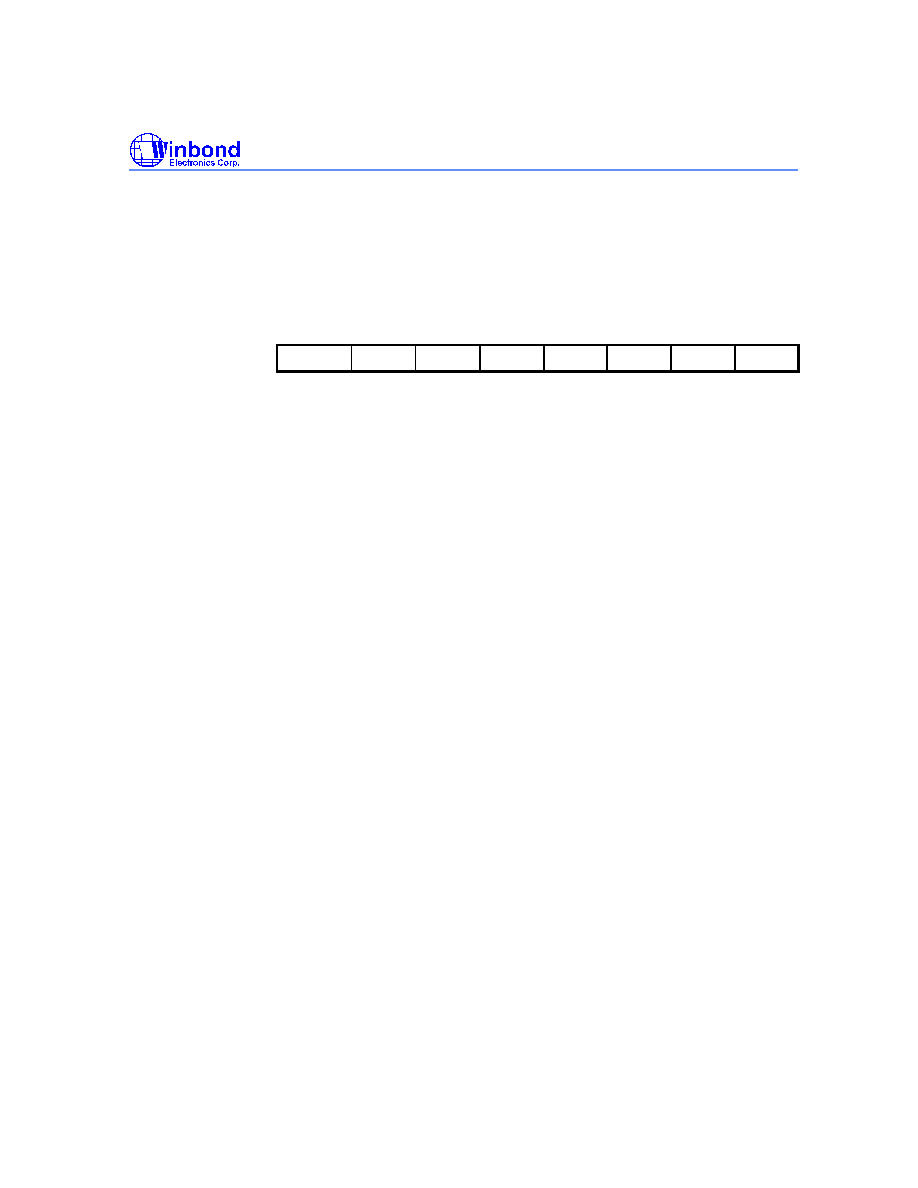
HIGH BYTE REGISTER
Bit:
7
6
5
4
3
2
1
0
Mnemonic: HB
Address: A1h
This register contains the high byte address during execution of " MOVX @Ri, " instructions.
PORT 4
Bit:
7
6
5
4
3
2
1
0
P4.7
P4.6
P4.5
P4.4
P4.3
P4.2
P4.1
P4.0
Mnemonic: P4
Address: A6h
P4.7-0: Port 4 is a bi-directional I/O port with internal pull-ups.
Preliminary W77E468
- 20 -
PORT 5
Bit:
7
6
5
4
3
2
1
0
P5.7
P5.6
P5.5
P5.4
P5.3
P5.2
P5.1
P5.0
Mnemonic: P5
Address: A7h
P5.7-0: Port 5 is a bi-directional I/O port with internal pull-ups.
PORT 6
Bit:
7
6
5
4
3
2
1
0
-
-
-
-
P6.3
P6.2
P6.1
P6.0
Mnemonic: P6
Address: A5h
P6.3-0: Port 6 is a 4-bit bi-directional I/O port with internal pull-ups.
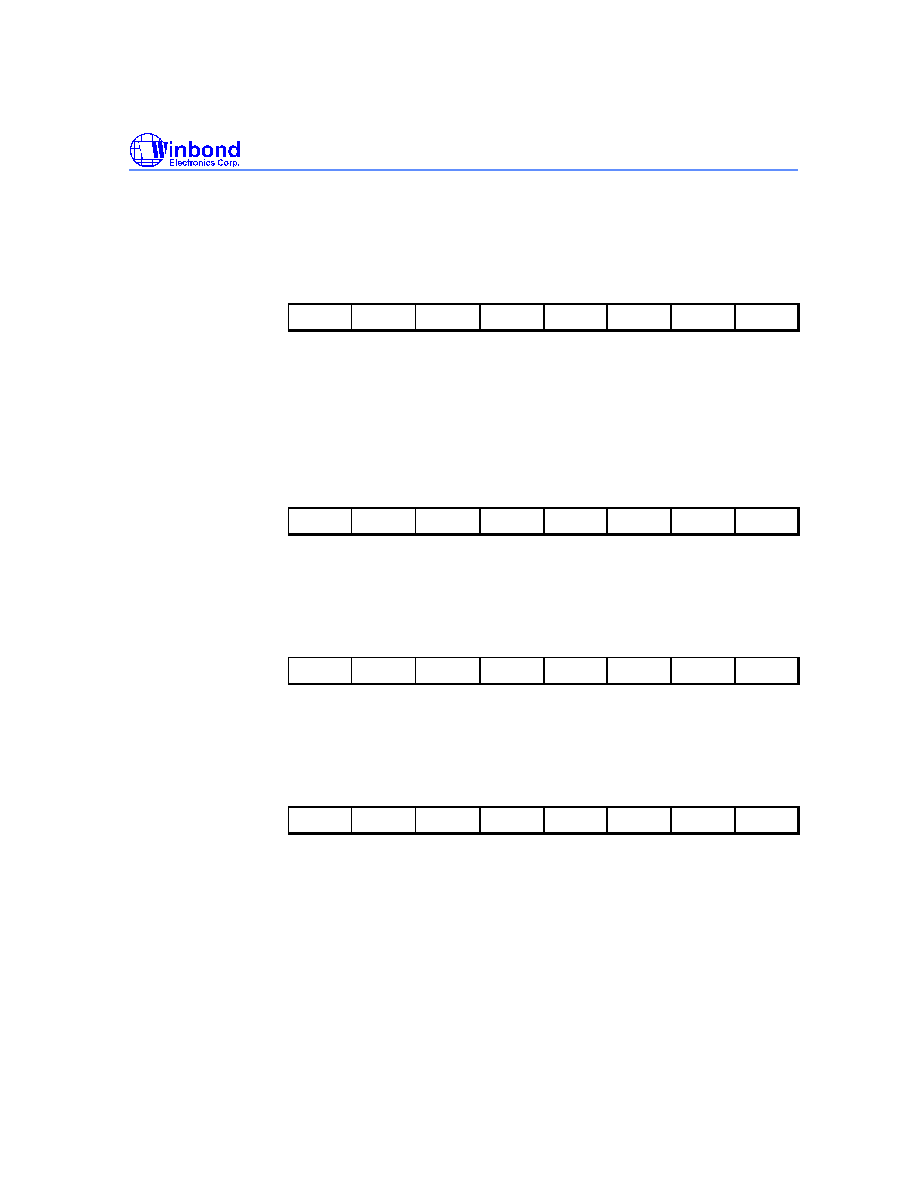
INTERRUPT ENABLE
Bit:
7
6
5
4
3
2
1
0
EA
ES1
ET2
ES
ET1
EX1
ET0
EX0
Mnemonic: IE
Address: A8h
EA:
Global enable. Enable/disable all interrupts except for PFI.
ES1:
Enable Serial Port 1 interrupt.
ET2:
Enable Timer 2 interrupt.
ES:
Enable Serial Port 0 interrupt.
ET1:
Enable Timer 1 interrupt
EX1:
Enable external interrupt 1
ET0:
Enable Timer 0 interrupt
EX0:
Enable external interrupt 0
SLAVE ADDRESS
Bit:
7
6
5
4
3
2
1
0
Mnemonic: SADDR
Address: A9h
SADDR: The SADDR should be programmed to the given or broadcast address for serial port 0 to
which the slave processor is designated.
Preliminary W77E468
Publication Release Date: January 1999
- 21 - Revision A1
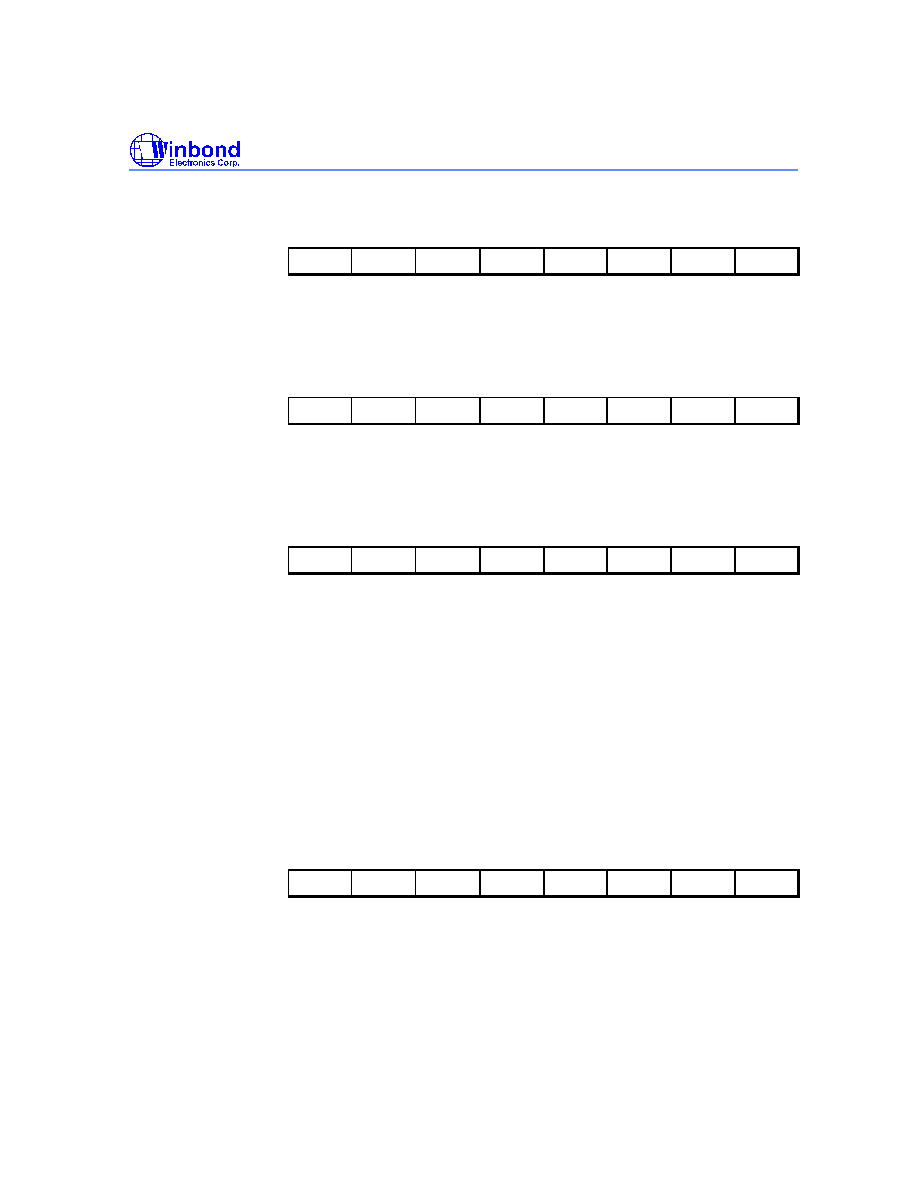
SLAVE ADDRESS 1
Bit:
7
6
5
4
3
2
1
0
Mnemonic: SADDR1
Address: AAh
SADDR1: The SADDR1 should be programmed to the given or broadcast address for serial port 1 to
which the slave processor is designated.
PORT 3
Bit:
7
6
5
4
3
2
1
0
-
-
P3.5
P3.4
P3.3
P3.2
P3.1
P3.0
Mnemonic: P3
Address: B0h
P3.5-0: General purpose I/O port. Each pin also has an alternate input or output function. The alternate
functions are described below.
P3.5
T1
Timer/counter 1 external count input
P3.4
T0
Timer/counter 0 external count input
P3.3
INT1
External interrupt 1
P3.2
INT0
External interrupt 0
P3.1
TxD
Serial port 0 output
P3.0
RxD
Serial port 0 input
INTERRUPT PRIORITY
Bit:
7
6
5
4
3
2
1
0
-
PS1
PT2
PS
PT1
PX1
PT0
PX0
Mnemonic: IP
Address: B8h
IP.7:
This bit is un-implemented and will read high.
PS1:
This bit defines the Serial port 1 interrupt priority. PS = 1 sets it to higher priority level.
PT2:
This bit defines the Timer 2 interrupt priority. PT2 = 1 sets it to higher priority level.
PS:
This bit defines the Serial port 0 interrupt priority. PS = 1 sets it to higher priority level.
PT1:
This bit defines the Timer 1 interrupt priority. PT1 = 1 sets it to higher priority level.
PX1:
This bit defines the External interrupt 1 priority. PX1 = 1 sets it to higher priority level.
PT0:
This bit defines the Timer 0 interrupt priority. PT0 = 1 sets it to higher priority level.
PX0:
This bit defines the External interrupt 0 priority. PX0 = 1 sets it to higher priority level.
Preliminary W77E468
- 22 -
SLAVE ADDRESS MASK ENABLE
Bit:
7
6
5
4
3
2
1
0
Mnemonic: SADEN
Address: B9h
SADEN: This register enables the Automatic Address Recognition feature of the Serial port 0. When
a bit in the SADEN is set to 1, the same bit location in SADDR will be compared with the
incoming serial data. When SADEN.n is 0, then the bit becomes a "don't care" in the
comparison. This register enables the Automatic Address Recognition feature of the Serial
port 0. When all the bits of SADEN are 0, interrupt will occur for any incoming address.
SLAVE ADDRESS MASK ENABLE 1
Bit:
7
6
5
4
3
2
1
0
Mnemonic: SADEN1
Address: BAh
SADEN1:This register enables the Automatic Address Recognition feature of the Serial port 1. When
a bit in the SADEN1 is set to 1, the same bit location in SADDR1 will be compared with the
incoming serial data. When SADEN1.n is 0, then the bit becomes a "don't care" in the
comparison. This register enables the Automatic Address Recognition feature of the Serial
port 1. When all the bits of SADEN1 are 0, interrupt will occur for any incoming address.
SERIAL PORT CONTROL 1
Bit:
7
6
5
4
3
2
1
0
SM0_1/FE_1
SM1_1
SM2_1
REN_1
TB8_1
RB8_1
TI_1
RI_1
Mnemonic: SCON1
Address: C0h
SM0_1/FE_1: Serial port 1, Mode 0 bit or Framing Error Flag 1: The SMOD0 bit in PCON SFR
determines whether this bit acts as SM0_1 or as FE_1. the operation of SM0_1 is
described below. When used as FE_1, this bit will be set to indicate an invalid stop bit.
This bit must be manually cleared in software to clear the FE_1 condition.
SM1_1: Serial port 1 Mode bit 1:
SM0_1 SM1_1 Mode
Description
Length
Baud rate
0
0
0
Synchronous
8
4/12 Tclk
0
1
1
Asynchronous
10
variable
1
0
2
Asynchronous
11
64/32 Tclk
1
1
3
Asynchronous
11
variable
Preliminary W77E468
Publication Release Date: January 1999
- 23 - Revision A1
SM2_1: Multiple processors communication. Setting this bit to 1 enables the multiprocessor
communication feature in mode 2 and 3. In mode 2 or 3, if SM2_1 is set to 1, then RI_1 will
not be activated if the received 9th data bit (RB8_1) is 0. In mode 1, if SM2_1 = 1, then RI_1
will not be activated if a valid stop bit was not received. In mode 0, the SM2_1 bit controls the
serial port 1 clock. If set to 0, then the serial port 1 runs at a divide by 12 clock of the
oscillator. This gives compatibility with the standard 8052. When set to 1, the serial clock
become divide by 4 of the oscillator clock. This results in faster synchronous serial
communication.
REN_1: Receive enable: When set to 1 serial reception is enabled, otherwise reception is disabled.
TB8_1: This is the 9th bit to be transmitted in modes 2 and 3. This bit is set and cleared by software
as desired.
RB8_1: In modes 2 and 3 this is the received 9th data bit. In mode 1, if SM2_1 = 0, RB8_1 is the stop
bit that was received. In mode 0 it has no function.
TI_1:
Transmit interrupt flag: This flag is set by hardware at the end of the 8th bit time in mode 0, or
at the beginning of the stop bit in all other modes during serial transmission. This bit must be
cleared by software.
RI_1: Receive interrupt flag: This flag is set by hardware at the end of the 8th bit time in mode 0, or
halfway through the stop bits time in the other modes during serial reception. However the
restrictions of SM2_1 apply to this bit. This bit can be cleared only by software.
SERIAL DATA BUFFER 1
Bit:
7
6
5
4
3
2
1
0
SBUF1.7 SBUF1.6 SBUF1.5 SBUF1.4 SBUF1.3 SBUF1.2 SBUF1.1 SBUF1.0
Mnemonic: SBUF1
Address: C1h
SBUF1.7-0: Serial data of the serial port 1 is read from or written to this location. It actually consists
of two separate 8-bit registers. One is the receive resister, and the other is the transmit
buffer. Any read access gets data from the receive data buffer, while write accesses are
to the transmit data buffer.
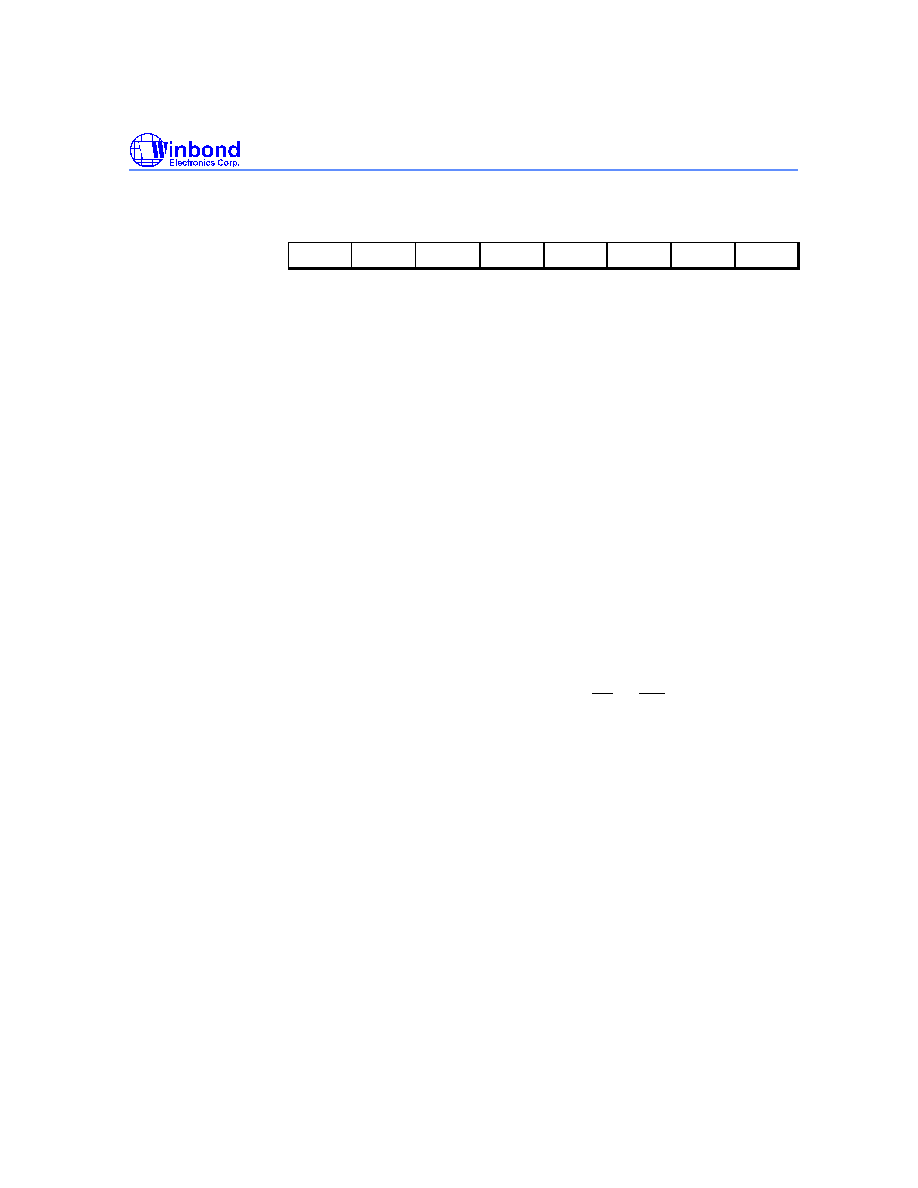
ROMMAP
Bit:
7
6
5
4
3
2
1
0
WS
1
-
-
-
-
-
-
Mnemonic: ROMMAP
Address: C2h
WS:
Wait State Signal Enable. Setting this bit enables the
WAIT
signal on P6.0. The
device will sample the wait state control signal
WAIT
via P6.0 during MOVX
instruction. This bit is time access protected.
Preliminary W77E468
- 24 -
POWER MANAGEMENT REGISTER
Bit:
7
6
5
4
3
2
1
0
CD1
CD0
SWB
-
XTOFF
ALE-OFF
-
DME0
Mnemonic: PMR
Address: C4h
CD1,CD0: Clock Divide Control. These bit selects the number of clocks required to generate one
machine cycle. There are three modes including divide by 4, 64 or 1024. Switching between
modes must first go back devide by 4 mode. For instance, to go from 64 to 1024
clocks/machine cycle the device must first go from 64 to 4 clocks/machine cycle, and then
from 4 to 1024 clocks/machine cycle.
CD1, CD0
clocks/machine cycle
0
0
Reserved
0
1
4
1
0
64
1
1
1024
SWB:
Switchback Enable. Setting this bit allows an enabled external interrupt or serial port activity
to force the CD1,CD0 to divide by 4 state (0,1). The device will switch modes at the start of
the jump to interrupt service routine while a external interrupt is enabled and actually
recongnized by microcontroller. While a serial port reception, the switchback occurs at the
start of the instruction following the falling edge of the start bit.
XTOFF: Crystal Oscillator Disable. Setting this bit disables the external crystal oscillator. This bit can
only be set to 1 while the microcontroller is operating from the RC oscillator. Clearing this bit
restarts the crystal oscillator, the XTUP (STATUS.4) bit will be set after crystal oscillator
warmed-up has completed.
ALEOFF: This bit disables the expression of the ALE signal on the device pin during all on-board
program and data memory accesses. External memory accesses will automatically enable
ALE independent of ALEOFF.
0 = ALE expression is enable; 1 = ALE expression is disable
DME0: This bit determines the on-chip MOVX SRAM to be enabled or disabled. Set this bit to 1 will
enable the on-chip 1KB MOVX SRAM.
Preliminary W77E468
Publication Release Date: January 1999
- 25 - Revision A1
STATUS REGISTER
Bit:
7
6
5
4
3
2
1
0
-
HIP
LIP
XTUP
SPTA1
SPRA1
SPTA0
SPRA0
Mnemonic: STATUS
Address: C5h
HIP: High Priority Interrupt Status. When set, it indicates that software is servicing a high priority
interrupt. This bit will be cleared when the program executes the corresponding RETI
instruction.
LIP: Low Priority Interrupt Status. When set, it indicates that software is servicing a low priority
interrupt. This bit will be cleared when the program executes the corresponding RETI
instruction.
XTUP:Crystal Oscillator Warm-up Status. when set, this bit indicates the crystal oscillator has
completed the 65536 clocks warm-up delay. Each time the crystal oscillator is restarted by exit
from power down mode or the XTOFF bit is set, hardware will clear this bit. This bit is set to 1
after a power-on reset. When this bit is cleared, it prevents software from setting the XT/
RG
bit
to enable CPU operation from crystal oscillator.
SPTA1:Serial Port 1 Transmit Activity. This bit is set during serial port 1 is currently transmitting data.
It is cleared when TI_1 bit is set by hardware. Changing the Clock Divide Control bits
CD0,CD1 will be ignored when this bit is set to 1 and SWB = 1.
SPRA1:Serial Port 1 Receive Activity. This bit is set during serial port 1 is currently receiving a data.
It is cleared when RI_1 bit is set by hardware. Changing the Clock Divide Control bits
CD0,CD1 will be ignored when this bit is set to 1 and SWB = 1.
SPTA0:Serial Port 0 Transmit Activity. This bit is set during serial port 0 is currently transmitting data.
It is cleared when TI bit is set by hardware. Changing the Clock Divide Control bits CD0,CD1
will be ignored when this bit is set to 1 and SWB = 1.
SPRA0:Serial Port 0 Receive Activity. This bit is set during serial port 0 is currently receiving a data.
It is cleared when RI bit is set by hardware. Changing the Clock Divide Control bits CD0,CD1
will be ignored when this bit is set to 1 and SWB = 1.
TIMED ACCESS
Bit:
7
6
5
4
3
2
1
0
TA.7
TA.6
TA.5
TA.4
TA.3
TA.2
TA.1
TA.0
Mnemonic: TA
Address: C7h
TA: The Timed Access register controls the access to protected bits. To access protected bits, the
user must first write AAH to the TA. This must be immediately followed by a write of 55H to TA.
Now a window is opened in the protected bits for three machine cycles, during which the user
can write to these bits.
Preliminary W77E468
- 26 -
TIMER 2 CONTROL
Bit:
7
6
5
4
3
2
1
0
TF2
EXF2
RCLK
TCLK
EXEN2
TR2
C/
T2
CP/
RL2
Mnemonic: T2CON
Address: C8h
TF2:
Timer 2 overflow flag: This bit is set when Timer 2 overflows. It is also set when the count is
equal to the capture register in down count mode. It can be set only if RCLK and TCLK are
both 0. It is cleared only by software. Software can also set or clear this bit.
EXF2: Timer 2 External Flag: A negative transition on the T2EX pin (P1.1) or timer 2 overflow will
cause this flag to set based on the CP/
RL2
, EXEN2 and DCEN bits. If set by a negative
transition, this flag must be cleared by software. Setting this bit in software or detection of a
negative transition on T2EX pin will force a timer interrupt if enabled.
RCLK: Receive Clock Flag: This bit determines the serial port 0 time-base when receiving data in
serial modes 1 or 3. If it is 0, then timer 1 overflow is used for baud rate generation, otherwise
timer 2 overflow is used. Setting this bit forces timer 2 in baud rate generator mode.
TCLK: Transmit Clock Flag: This bit determines the serial port 0 time-base when transmitting data in
modes 1 and 3. If it is set to 0, the timer 1 overflow is used to generate the baud rate clock,
otherwise timer 2 overflow is used. Setting this bit forces timer 2 in baud rate generator mode.
EXEN2: Timer 2 External Enable. This bit enables the capture/reload function on the T2EX pin if Timer
2 is not generating baud clocks for the serial port. If this bit is 0, then the T2EX pin will be
ignored, otherwise a negative transition detected on the T2EX pin will result in capture or
reload.
TR2:
Timer 2 Run Control. This bit enables/disables the operation of timer 2. Clearing this bit will
halt the timer 2 and preserve the current count in TH2, TL2.
C/
T2
: Counter/Timer Select. This bit determines whether timer 2 will function as a timer or a
counter. Independent of this bit, the timer will run at 2 clocks per tick when used in baud rate
generator mode. If it is set to 0, then timer 2 operates as a timer at a speed depending on
T2M bit (CKCON.5), otherwise it will count negative edges on T2 pin.
CP/
RL2
:Capture/Reload Select. This bit determines whether the capture or reload function will be
used for timer 2. If either RCLK or TCLK is set, this bit will be ignored and the timer will
function in an auto-reload mode following each overflow. If the bit is 0 then auto-reload will
occur when timer 2 overflows or a falling edge is detected on T2EX pin if EXEN2 = 1. If this
bit is 1, then timer 2 captures will occur when a falling edge is detected on T2EX pin if EXEN2
=1.
TIMER 2 MODE CONTROL
Bit:
7
6
5
4
3
2
1
0
HC5
HC4
HC3
HC2
T2CR
-
T2OE DCEN
Mnemonic: T2MOD
Address: C9h
Preliminary W77E468
Publication Release Date: January 1999
- 27 - Revision A1
HC5: Hardware Clear
INT5
flag. Setting this bit allows the flag of external interrupt 5 to be
automatically cleared by hardware while entering the interrupt service routine.
HC4: Hardware Clear INT4 flag. Setting this bit allows the flag of external interrupt 4 to be
automatically cleared by hardware while entering the interrupt service routine.
HC3: Hardware Clear
INT3
flag. Setting this bit allows the flag of external interrupt 3 to be
automatically cleared by hardware while entering the interrupt service routine.
HC3: Hardware Clear INT2 flag. Setting this bit allows the flag of external interrupt 3 to be
automatically cleared by hardware while entering the interrupt service routine.
T2CR: Timer 2 Capture Reset. In the Timer 2 Capture Mode this bit enables/disables hardware
automatically reset Timer 2 while the value in TL2 and TH2 have been transferred into the
capture register.
T2OE: Timer 2 Output Enable. This bit enables/disables the Timer 2 clock out function.
DCEN: Down Count Enable: This bit, in conjunction with the T2EX pin, controls the direction that
timer 2 counts in 16-bit auto-reload mode.
TIMER 2 CAPTURE LSB
Bit:
7
6
5
4
3
2
1
0
RCAP2L.7
RCAP2L.6
RCAP2L.5 RCAP2L.4 RCAP2L.3 RCAP2L.2 RCAP2L.1
RCAP2L.0
Mnemonic: RCAP2L
Address: CAh
RCAP2L:This register is used to capture the TL2 value when a timer 2 is configured in capture mode.
RCAP2L is also used as the LSB of a 16-bit reload value when timer 2 is configured in auto-
reload mode.
TIMER 2 CAPTURE MSB
Bit:
7
6
5
4
3
2
1
0
RCAP2H.7 RCAP2H.6 RCAP2H.5 RCAP2H.4 RCAP2H.3 RCAP2H.2 RCAP2H.1 RCAP2H.0
Mnemonic: RCAP2H
Address: CBh
RCAP2H:This register is used to capture the TH2 value when a timer 2 is configured in capture mode.
RCAP2H is also used as the MSB of a 16-bit reload value when timer 2 is configured in
auto-reload mode.
TIMER 2 LSB
Bit:
7
6
5
4
3
2
1
0
TL2.7
TL2.6
TL2.5
TL2.4
TL2.3
TL2.2
TL2.1
TL2.0
Mnemonic: TL2
Address: CCh
TL2:
Timer 2 LSB
Preliminary W77E468
- 28 -
TIMER 2 MSB
Bit:
7
6
5
4
3
2
1
0
TH2.7
TH2.6
TH2.5
TH2.4
TH2.3
TH2.2
TH2.1
TH2.0
Mnemonic: TH2
Address: CDh
TH2:
Timer 2 MSB
PROGRAM STATUS WORD
Bit:
7
6
5
4
3
2
1
0
CY
AC
F0
RS1
RS0
OV
F1
P
Mnemonic: PSW
Address: D0h
CY:
Carry flag: Set for an arithmetic operation which results in a carry being generated from the
ALU. It is also used as the accumulator for the bit operations.
AC:
Auxiliary carry: Set when the previous operation resulted in a carry from the high order nibble.
F0:
User flag 0: General purpose flag that can be set or cleared by the user.
RS.1-0: Register bank select bits:
RS1 RS0
Register bank
Address
0
0
0
00-07h
0
1
1
08-0Fh
1
0
2
10-17h
1
1
3
18-1Fh
OV:
Overflow flag: Set when a carry was generated from the seventh bit but not from the 8th bit
as a result of the previous operation, or vice-versa.
F1:
User Flag 1: General purpose flag that can be set or cleared by the user by software.
P:
Parity flag: Set/cleared by hardware to indicate odd/even number of 1's in the accumulator.
WATCHDOG CONTROL
Bit:
7
6
5
4
3
2
1
0
SMOD_1
POR
-
-
WDIF
WTRF
EWT
RWT
Mnemonic: WDCON
Address: D8h
Preliminary W77E468
Publication Release Date: January 1999
- 29 - Revision A1
SMOD_1:This bit doubles the Serial Port 1 baud rate in mode 1, 2, and 3 when set to 1.
POR: Power-on reset flag. Hardware will set this flag on a power up condition. This flag can be read
or written by software. A write by software is the only way to clear this bit once it is set.
WDIF: Watchdog Timer Interrupt Flag. If the watchdog interrupt is enabled, hardware will set this bit
to indicate that the watchdog interrupt has occurred. If the interrupt is not enabled, then this
bit indicates that the time-out period has elapsed. This bit must be cleared by software.
WTRF: Watchdog Timer Reset Flag. Hardware will set this bit when the watchdog timer causes a
reset. Software can read it but must clear it manually. A power-fail reset will also clear the bit.
This bit helps software in determining the cause of a reset. If EWT = 0, the watchdog timer
will have no affect on this bit.
EWT: Enable Watchdog timer Reset. Setting this bit will enable the Watchdog timer Reset function.
RWT: Reset Watchdog Timer. This bit helps in putting the watchdog timer into a know state. It also
helps in resetting the watchdog timer before a time-out occurs. Failing to set the EWT before
time-out will cause an interrupt, if EWDI (EIE.4) is set, and 512 clocks after that a watchdog
timer reset will be generated if EWT is set. This bit is self-clearing by hardware.
The WDCON SFR is set to a 0x0x0xx0b on an external reset. WTRF is set to a 1 on a Watchdog timer
reset, but to a 0 on power on/down resets. WTRF is not altered by an external reset. POR is set to 1 by
a power-on reset. EWT is set to 0 on a Power-on reset and unaffected by other resets.
All the bits in this SFR have unrestricted read access. POR, EWT, WDIF and RWT require Timed
Access procedure to write. The remaining bits have unrestricted write accesses.
ACCUMULATOR
Bit:
7
6
5
4
3
2
1
0
ACC.7 ACC.6
ACC.5
ACC.4
ACC.3 ACC.2
ACC.1 ACC.0
Mnemonic: ACC
Address: E0h
ACC.7-0:The A (or ACC) register is the standard 8052 accumulator.
EXTENDED INTERRUPT ENABLE
Bit:
7
6
5
4
3
2
1
0
-
-
-
EWDI
EX5
EX4
EX3
EX2
Mnemonic: EIE
Address: E8h
Preliminary W77E468
- 30 -
EIE.7-5:Reserved bits, will read high
EWDI: Enable Watchdog timer interrupt
EX5: External Interrupt 5 Enable.
EX4: External Interrupt 4 Enable.
EX3: External Interrupt 3 Enable.
EX2: External Interrupt 2 Enable.
B REGISTER
Bit:
7
6
5
4
3
2
1
0
B.7
B.6
B.5
B.4
B.3
B.2
B.1
B.0
Mnemonic: B
Address: F0h
B.7-0:The B register is the standard 8052 register that serves as a second accumulator.
EXTENDED INTERRUPT PRIORITY
Bit:
7
6
5
4
3
2
1
0
-
-
-
PWDI
PX5
PX4
PX3
PX2
Mnemonic: EIP
Address: F8h
EIP.7-5:Reserved bits.
PWDI: Watchdog timer interrupt priority.
PX5:
External Interrupt 5 Priority. 0 = Low priority, 1 = High priority.
PX4:
External Interrupt 4 Priority. 0 = Low priority, 1 = High priority.
PX3:
External Interrupt 3 Priority. 0 = Low priority, 1 = High priority.
PX2:
External Interrupt 2 Priority. 0 = Low priority, 1 = High priority.
INSTRUCTION
The W77E468 executes all the instructions of the standard 8032 family. The operation of these
instructions, their effect on the flag bits and the status bits is exactly the same. However, timing of these
instructions is different. The reason for this is two fold. Firstly, in the W77E468, each machine cycle
consists of 4 clock periods, while in the standard 8032 it consists of 12 clock periods. Also, in the
W77E468 there is only one fetch per machine cycle i.e. 4 clocks per fetch, while in the standard 8032
there can be two fetches per machine cycle, which works out to 6 clocks per fetch.
The advantage the W77E468 has is that since there is only one fetch per machine cycle, the number of
machine cycles in most cases is equal to the number of operands that the instruction has. In case of
jumps and calls there will be an additional cycle that will be needed to calculate the new address. But
overall the W77E468 reduces the number of dummy fetches and wasted cycles, thereby improving
efficiency as compared to the standard 8032.
Preliminary W77E468
Publication Release Date: January 1999
- 31 - Revision A1
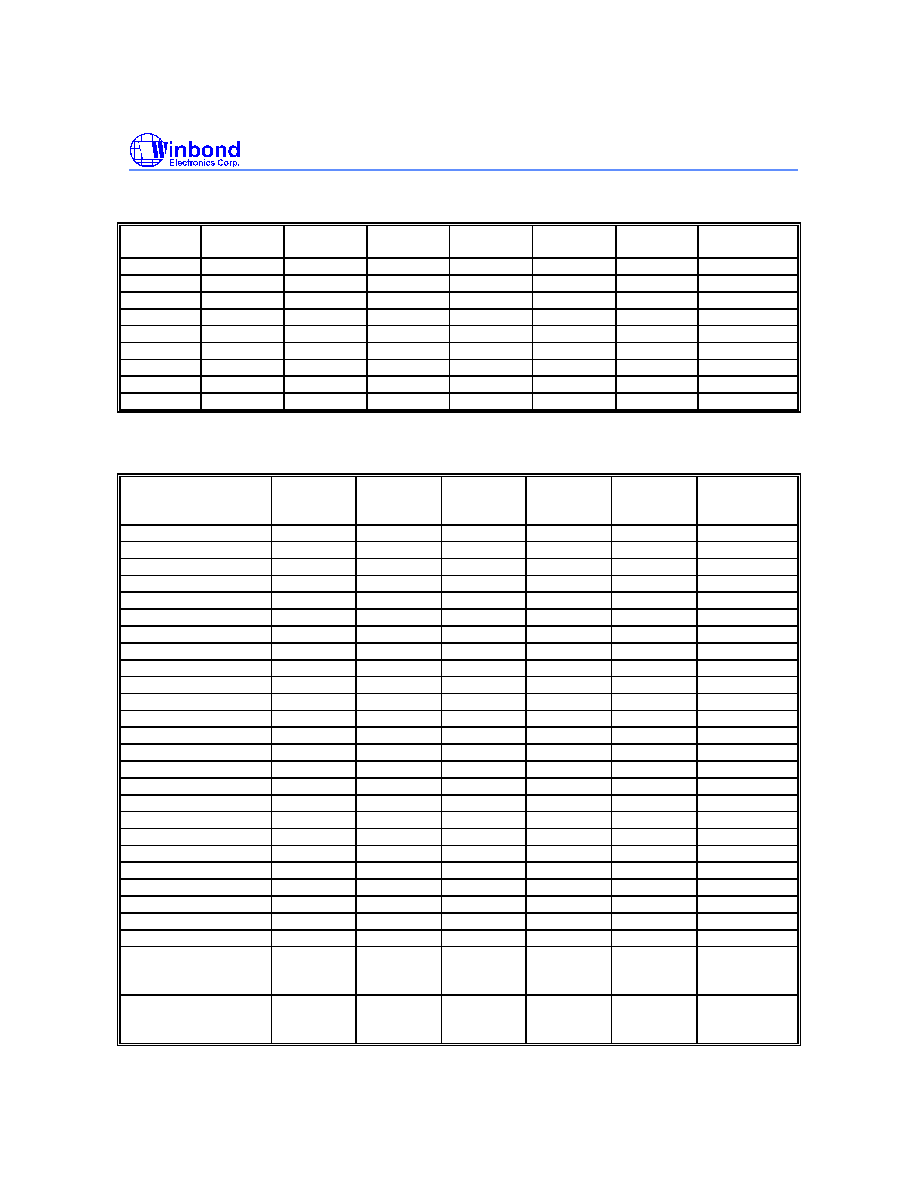
Table 2. Instructions that affect Flag settings
Instruction
Carry
Overflow
Auxiliary
Carry
Instruction
Carry
Overflow
Auxiliary
Carry
ADD
X
X
X
CLR C
0
ADDC
X
X
X
CPL C
X
SUBB
X
X
X
ANL C, bit
X
MUL
0
X
ANL C, bit
X
DIV
0
X
ORL C, bit
X
DA A
X
ORL C, bit
X
RRC A
X
MOV C, bit
X
RLC A
X
CJNE
X
SETB C
1
A "X" indicates that the modification is as per the result of instruction.
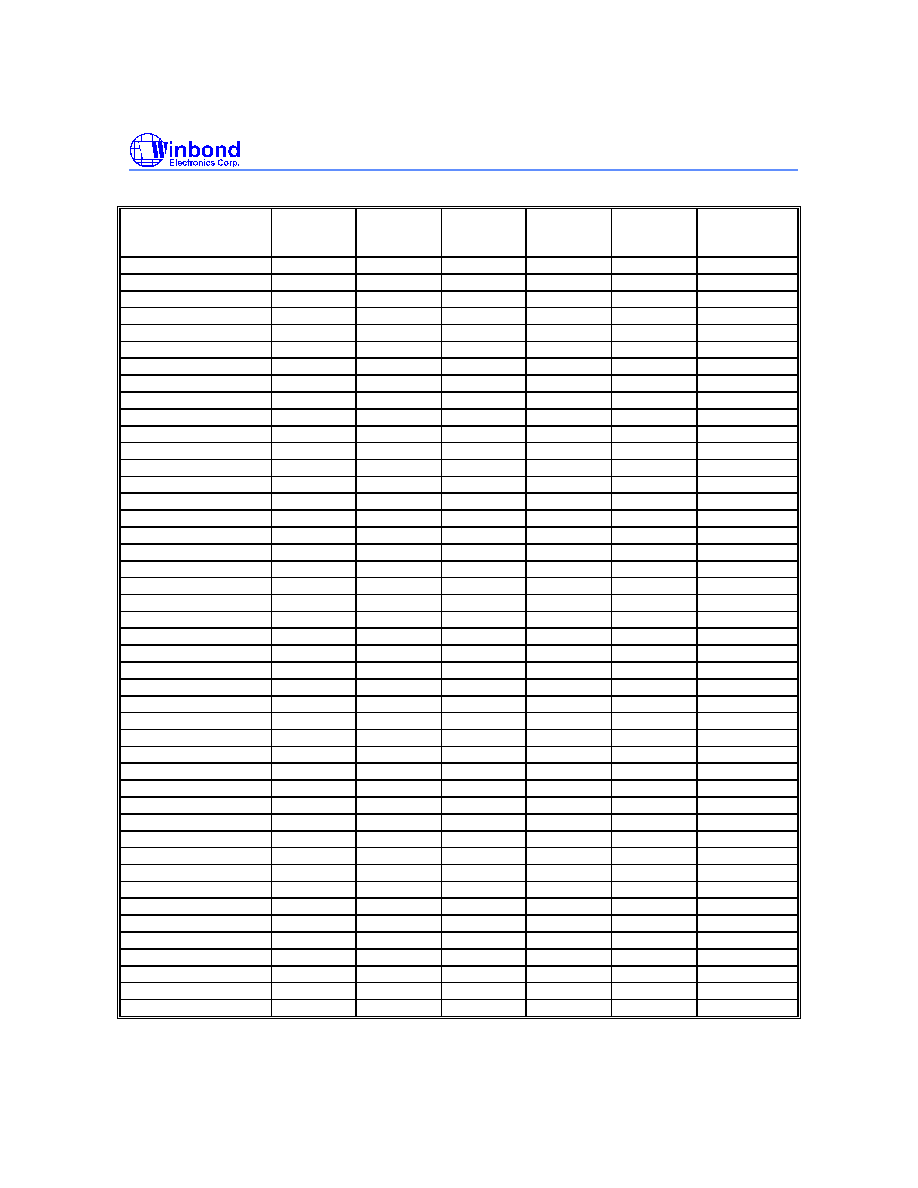
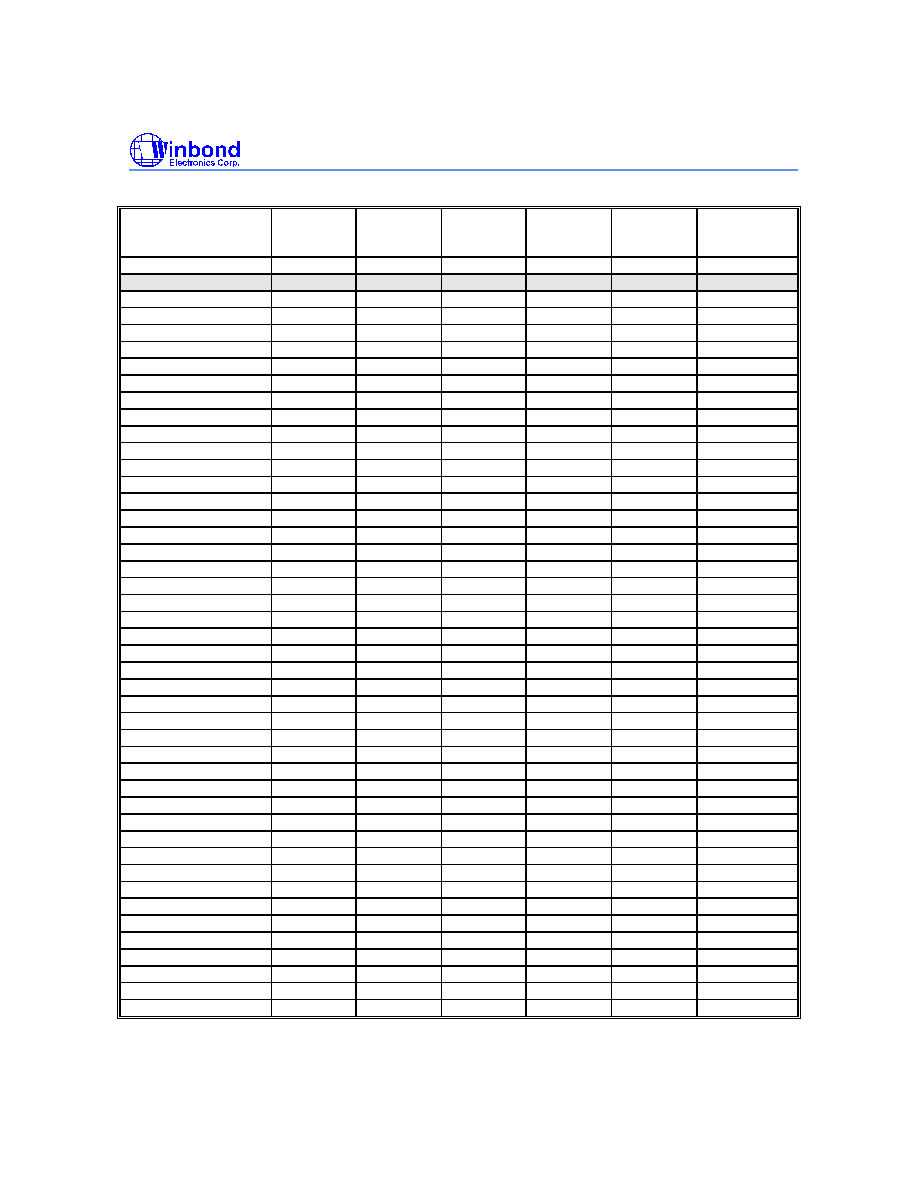
Table 3. Instruction Timing for W77E468
Instruction
HEX
Op-Code
Bytes
W77E468
Machine
Cycles
W77E468
Clock
cycles
8032
Clock
cycles
W77E468 vs.
8032 Speed
Ratio
NOP
00
1
1
4
12
3
ADD A, R0
28
1
1
4
12
3
ADD A, R1
29
1
1
4
12
3
ADD A, R2
2A
1
1
4
12
3
ADD A, R3
2B
1
1
4
12
3
ADD A, R4
2C
1
1
4
12
3
ADD A, R5
2D
1
1
4
12
3
ADD A, R6
2E
1
1
4
12
3
ADD A, R7
2F
1
1
4
12
3
ADD A, @R0
26
1
1
4
12
3
ADD A, @R1
27
1
1
4
12
3
ADD A, direct
25
2
2
8
12
1.5
ADD A, #data
24
2
2
8
12
1.5
ADDC A, R0
38
1
1
4
12
3
ADDC A, R1
39
1
1
4
12
3
ADDC A, R2
3A
1
1
4
12
3
ADDC A, R3
3B
1
1
4
12
3
ADDC A, R4
3C
1
1
4
12
3
ADDC A, R5
3D
1
1
4
12
3
ADDC A, R6
3E
1
1
4
12
3
ADDC A, R7
3F
1
1
4
12
3
ADDC A, @R0
36
1
1
4
12
3
ADDC A, @R1
37
1
1
4
12
3
ADDC A, direct
35
2
2
8
12
1.5
ADDC A, #data
34
2
2
8
12
1.5
ACALL addr11
71,91,B1,
11,31,51,
D1,F1
2
3
12
24
2
AJMP ADDR11
01,21,41,
61,81,A1,
C1,E1
2
3
12
24
2
Preliminary W77E468
- 32 -
Table 3. Instruction Timing for W77E468, continued
Instruction
HEX
Op-Code
Bytes
W77E468
Machine
Cycles
W77E468
Clock
cycles
8032
Clock
cycles
W77E468 vs.
8032 Speed
Ratio
ANL A, R0
58
1
1
4
12
3
ANL A, R1
59
1
1
4
12
3
ANL A, R2
5A
1
1
4
12
3
ANL A, R3
5B
1
1
4
12
3
ANL A, R4
5C
1
1
4
12
3
ANL A, R5
5D
1
1
4
12
3
ANL A, R6
5E
1
1
4
12
3
ANL A, R7
5F
1
1
4
12
3
ANL A, @R0
56
1
1
4
12
3
ANL A, @R1
57
1
1
4
12
3
ANL A, direct
55
2
2
8
12
1.5
ANL A, #data
54
2
2
8
12
1.5
ANL direct, A
52
2
2
8
12
1.5
ANL direct, #data
53
3
3
12
24
2
ANL C, bit
82
2
2
8
24
3
ANL C, /bit
B0
2
2
8
24
3
CJNE A, direct, rel
B5
3
4
16
24
1.5
CJNE A, #data, rel
B4
3
4
16
24
1.5
CJNE @R0, #data, rel
B6
3
4
16
24
1.5
CJNE @R1, #data, rel
B7
3
4
16
24
1.5
CJNE R0, #data, rel
B8
3
4
16
24
1.5
CJNE R1, #data, rel
B9
3
4
16
24
1.5
CJNE R2, #data, rel
BA
3
4
16
24
1.5
CJNE R3, #data, rel
BB
3
4
16
24
1.5
CJNE R4, #data, rel
BC
3
4
16
24
1.5
CJNE R5, #data, rel
BD
3
4
16
24
1.5
CJNE R6, #data, rel
BE
3
4
16
24
1.5
CJNE R7, #data, rel
BF
3
4
16
24
1.5
CLR A
E4
1
1
4
12
3
CPL A
F4
1
1
4
12
3
CLR C
C3
1
1
4
12
3
CLR bit
C2
2
2
8
12
1.5
CPL C
B3
1
1
4
12
3
CPL bit
B2
2
2
8
12
1.5
DEC A
14
1
1
4
12
3
DEC R0
18
1
1
4
12
3
DEC R1
19
1
1
4
12
3
DEC R2
1A
1
1
4
12
3
DEC R3
1B
1
1
4
12
3
DEC R4
1C
1
1
4
12
3
DEC R5
1D
1
1
4
12
3
DEC R6
1E
1
1
4
12
3
DEC R7
1F
1
1
4
12
3
DEC @R0
16
1
1
4
12
3
DEC @R1
17
1
1
4
12
3
Preliminary W77E468
Publication Release Date: January 1999
- 33 - Revision A1
Table 3. Instruction Timing for W77E468, continued
Instruction
HEX
Op-Code
Bytes
W77E468
Machine
Cycles
W77E468
Clock
cycles
8032
Clock
cycles
W77E468 vs.
8032 Speed
Ratio
DEC direct
15
2
2
8
12
1.5
DEC DPTR
A5
1
2
8
-
-
DIV AB
84
1
5
20
48
2.4
DA A
D4
1
1
4
12
3
DJNZ R0, rel
D8
2
3
12
24
2
DJNZ R1, rel
D9
2
3
12
24
2
DJNZ R5, rel
DD
2
3
12
24
2
DJNZ R2, rel
DA
2
3
12
24
2
DJNZ R3, rel
DB
2
3
12
24
2
DJNZ R4, rel
DC
2
3
12
24
2
DJNZ R6, rel
DE
2
3
12
24
2
DJNZ R7, rel
DF
2
3
12
24
2
DJNZ direct, rel
D5
3
4
16
24
1.5
INC A
04
1
1
4
12
3
INC R0
08
1
1
4
12
3
INC R1
09
1
1
4
12
3
INC R2
0A
1
1
4
12
3
INC R3
0B
1
1
4
12
3
INC R4
0C
1
1
4
12
3
INC R5
0D
1
1
4
12
3
INC R6
0E
1
1
4
12
3
INC R7
0F
1
1
4
12
3
INC @R0
06
1
1
4
12
3
INC @R1
07
1
1
4
12
3
INC direct
05
2
2
8
12
1.5
INC DPTR
A3
1
2
8
24
3
JMP @A+DPTR
73
1
2
8
24
3
JZ rel
60
2
3
12
24
2
JNZ rel
70
2
3
12
24
2
JC rel
40
2
3
12
24
2
JNC rel
50
2
3
12
24
2
JB bit, rel
20
3
4
16
24
1.5
JNB bit, rel
30
3
4
16
24
1.5
JBC bit, rel
10
3
4
16
24
1.5
LCALL addr16
12
3
4
16
24
1.5
LJMP addr16
02
3
4
16
24
1.5
MUL AB
A4
1
5
20
48
2.4
MOV A, R0
E8
1
1
4
12
3
MOV A, R1
E9
1
1
4
12
3
MOV A, R2
EA
1
1
4
12
3
MOV A, R3
EB
1
1
4
12
3
MOV A, R4
EC
1
1
4
12
3
MOV A, R5
ED
1
1
4
12
3
MOV A, R6
EE
1
1
4
12
3
MOV A, R7
EF
1
1
4
12
3
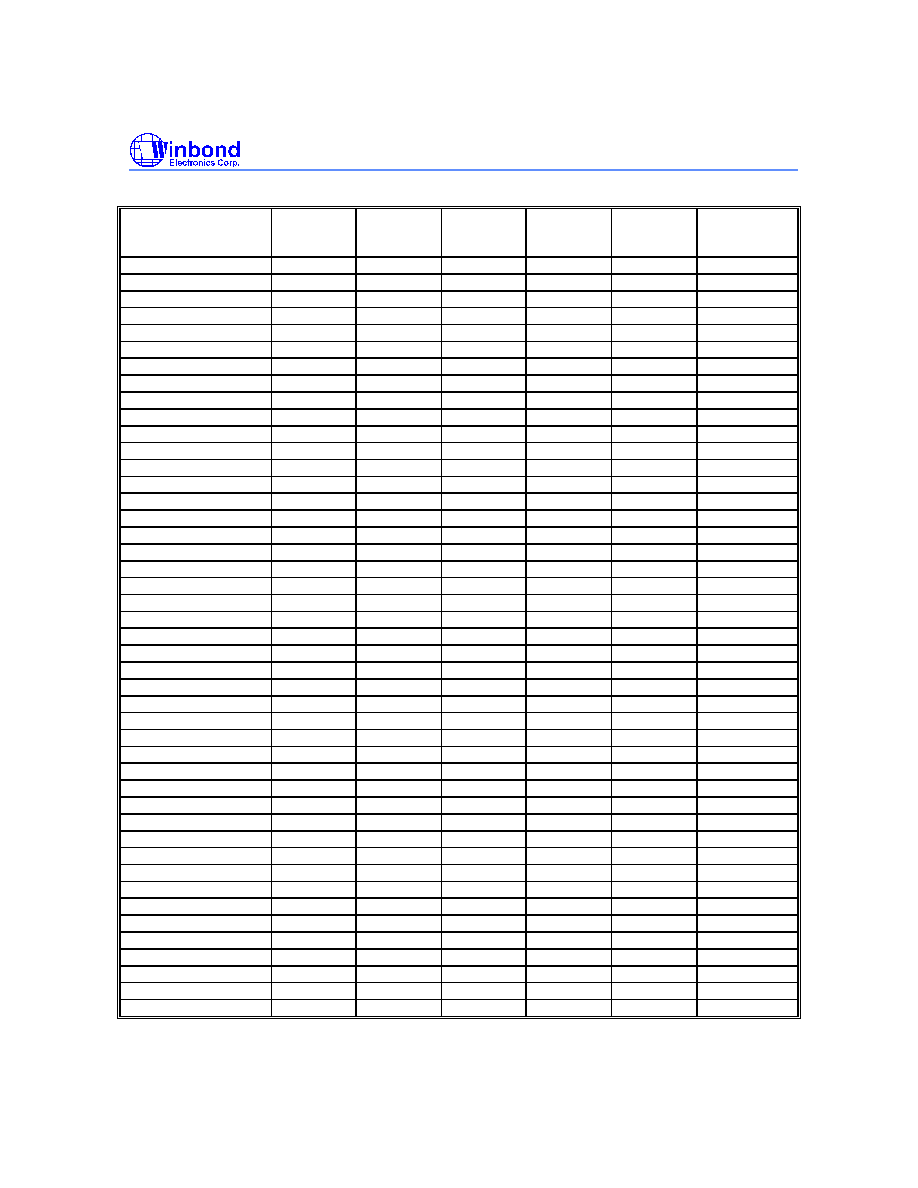
Preliminary W77E468
- 34 -
Table 3. Instruction Timing for W77E468, continued
Instruction
HEX
Op-Code
Bytes
W77E468
Machine
Cycles
W77E468
Clock
cycles
8032
Clock
cycles
W77E468 vs.
8032 Speed
Ratio
MOV A, @R0
E6
1
1
4
12
3
MOV A, @R1
E7
1
1
4
12
3
MOV A, direct
E5
2
2
8
12
1.5
MOV A, #data
74
2
2
8
12
1.5
MOV R0, A
F8
1
1
4
12
3
MOV R1, A
F9
1
1
4
12
3
MOV R2, A
FA
1
1
4
12
3
MOV R3, A
FB
1
1
4
12
3
MOV R4, A
FC
1
1
4
12
3
MOV R5, A
FD
1
1
4
12
3
MOV R6, A
FE
1
1
4
12
3
MOV R7, A
FF
1
1
4
12
3
MOV R0, direct
A8
2
2
8
12
1.5
MOV R1, direct
A9
2
2
8
12
1.5
MOV R2, direct
AA
2
2
8
12
1.5
MOV R3, direct
AB
2
2
8
12
1.5
MOV R4, direct
AC
2
2
8
12
1.5
MOV R5, direct
AD
2
2
8
12
1.5
MOV R6, direct
AE
2
2
8
12
1.5
MOV R7, direct
AF
2
2
8
12
1.5
MOV R0, #data
78
2
2
8
12
1.5
MOV R1, #data
79
2
2
8
12
1.5
MOV R2, #data
7A
2
2
8
12
1.5
MOV R3, #data
7B
2
2
8
12
1.5
MOV R4, #data
7C
2
2
8
12
1.5
MOV R5, #data
7D
2
2
8
12
1.5
MOV R6, #data
7E
2
2
8
12
1.5
MOV R7, #data
7F
2
2
8
12
1.5
MOV @R0, A
F6
1
1
4
12
3
MOV @R1, A
F7
1
1
4
12
3
MOV @R0, direct
A6
2
2
8
12
1.5
MOV @R1, direct
A7
2
2
8
12
1.5
MOV @R0, #data
76
2
2
8
12
1.5
MOV @R1, #data
77
2
2
8
12
1.5
MOV direct, A
F5
2
2
8
12
1.5
MOV direct, R0
88
2
2
8
12
1.5
MOV direct, R1
89
2
2
8
12
1.5
MOV direct, R2
8A
2
2
8
12
1.5
MOV direct, R3
8B
2
2
8
12
1.5
MOV direct, R4
8C
2
2
8
12
1.5
MOV direct, R5
8D
2
2
8
12
1.5
MOV direct, R6
8E
2
2
8
12
1.5
MOV direct, R7
8F
2
2
8
12
1.5
MOV direct, @R0
86
2
2
8
12
1.5
MOV direct, @R1
87
2
2
8
12
1.5
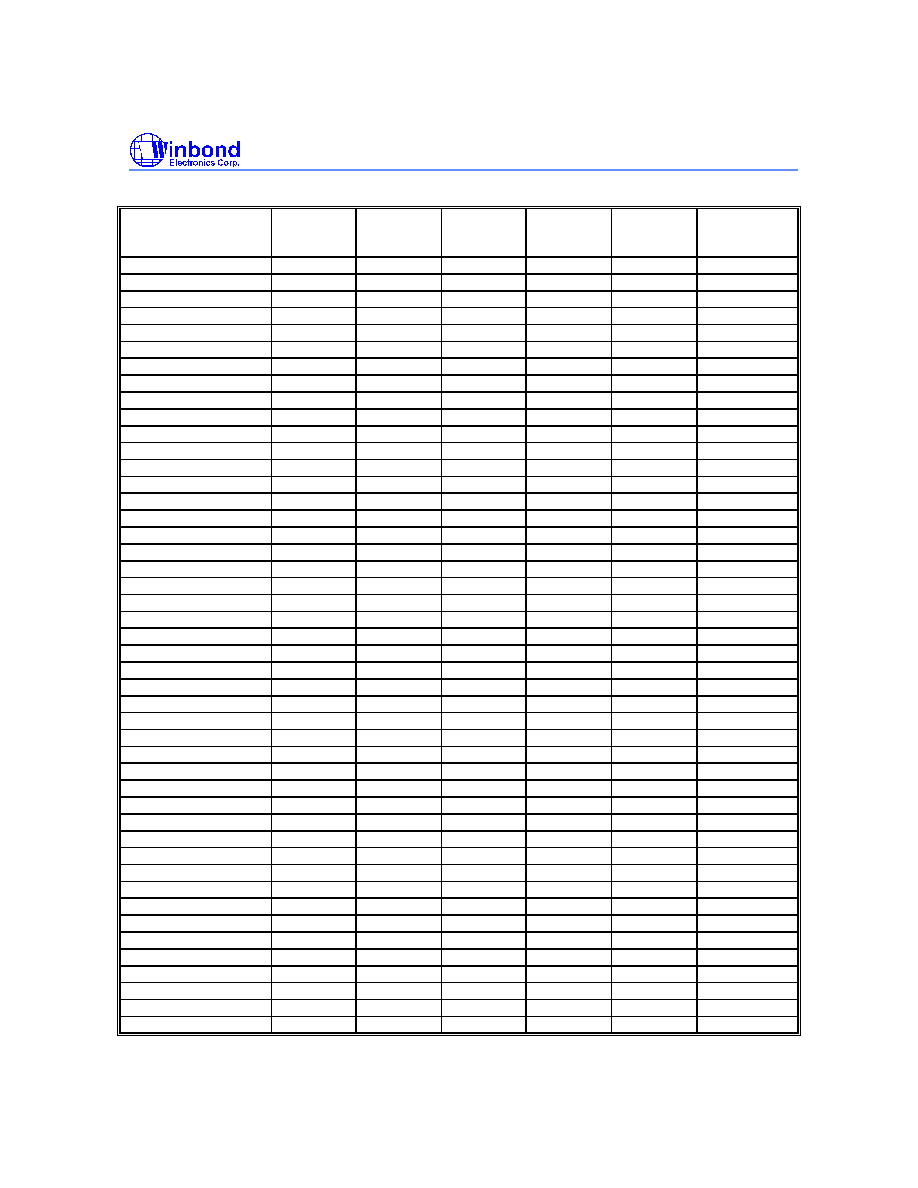
Preliminary W77E468
Publication Release Date: January 1999
- 35 - Revision A1
Table 3. Instruction Timing for W77E468, continued
Instruction
HEX
Op-Code
Bytes
W77E468
Machine
Cycles
W77E468
Clock
cycles
8032
Clock
cycles
W77E468 vs.
8032 Speed
Ratio
MOV direct, direct
85
3
3
12
24
2
MOV direct, #data
75
3
3
12
24
2
MOV DPTR, #data 16
90
3
3
12
24
2
MOVC A, @A+DPTR
93
1
2
8
24
3
MOVC A, @A+PC
83
1
2
8
24
3
MOVX A, @R0
E2
1
2 - 9
8 - 36
24
3 - 0.66
MOVX A, @R1
E3
1
2 - 9
8 - 36
24
3 - 0.66
MOVX A, @DPTR
E0
1
2 - 9
8 - 36
24
3 - 0.66
MOVX @R0, A
F2
1
2 - 9
8 - 36
24
3 - 0.66
MOVX @R1, A
F3
1
2 - 9
8 - 36
24
3 - 0.66
MOVX @DPTR, A
F0
1
2 - 9
8 - 36
24
3 - 0.66
MOV C, bit
A2
2
2
8
12
1.5
MOV bit, C
92
2
2
8
24
3
ORL A, R0
48
1
1
4
12
3
ORL A, R1
49
1
1
4
12
3
ORL A, R2
4A
1
1
4
12
3
ORL A, R3
4B
1
1
4
12
3
ORL A, R4
4C
1
1
4
12
3
ORL A, R5
4D
1
1
4
12
3
ORL A, R6
4E
1
1
4
12
3
ORL A, R7
4F
1
1
4
12
3
ORL A, @R0
46
1
1
4
12
3
ORL A, @R1
47
1
1
4
12
3
ORL A, direct
45
2
2
8
12
1.5
ORL A, #data
44
2
2
8
12
1.5
ORL direct, A
42
2
2
8
12
1.5
ORL direct, #data
43
3
3
12
24
2
ORL C, bit
72
2
2
8
24
3
ORL C, /bit
A0
2
2
6
24
3
PUSH direct
C0
2
2
8
24
3
POP direct
D0
2
2
8
24
3
RET
22
1
2
8
24
3
RETI
32
1
2
8
24
3
RL A
23
1
1
4
12
3
RLC A
33
1
1
4
12
3
RR A
03
1
1
4
12
3
RRC A
13
1
1
4
12
3
SETB C
D3
1
1
4
12
3
SETB bit
D2
2
2
8
12
1.5
SWAP A
C4
1
1
4
12
3
SJMP rel
80
2
3
12
24
2
SUBB A, R0
98
1
1
4
12
3
SUBB A, R1
99
1
1
4
12
3
SUBB A, R2
9A
1
1
4
12
3
SUBB A, R3
9B
1
1
4
12
3
SUBB A, R4
9C
1
1
4
12
3
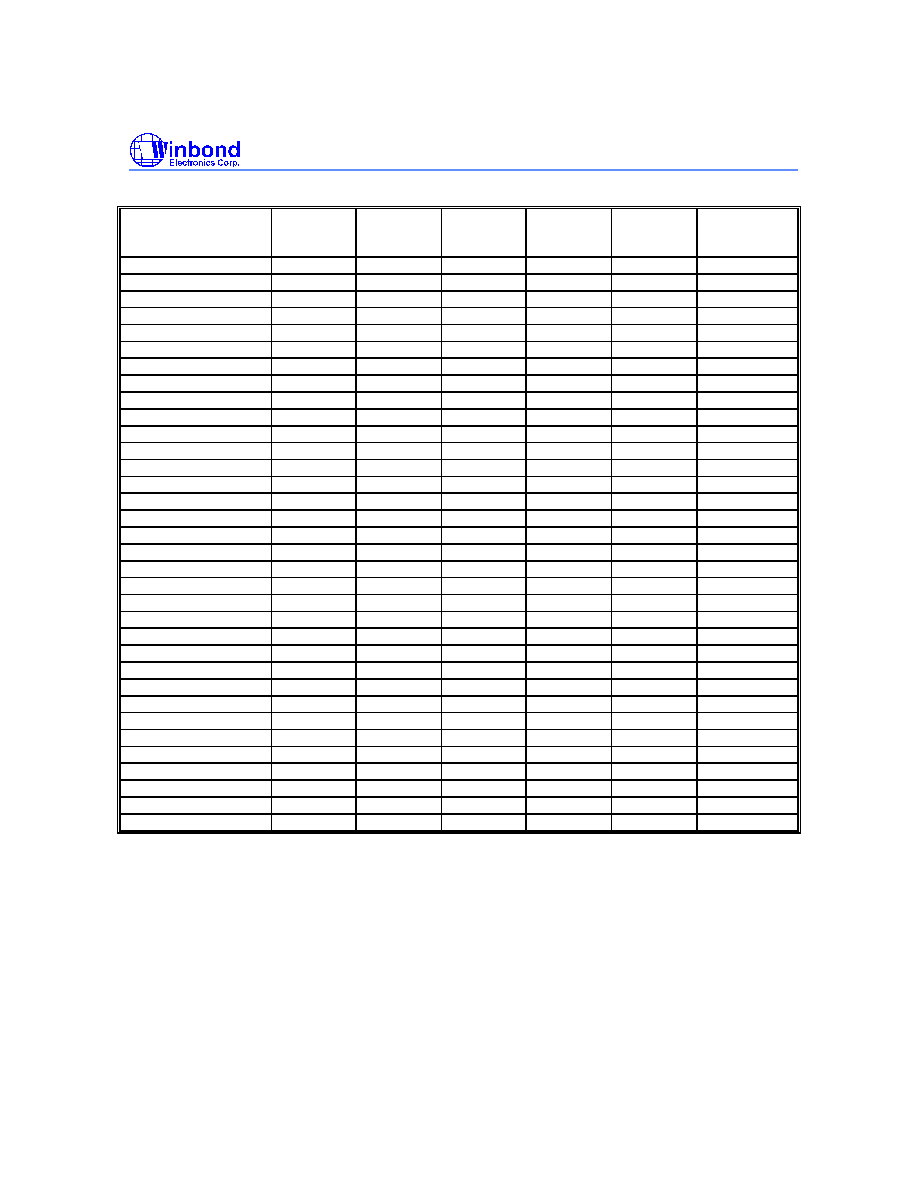
Preliminary W77E468
- 36 -
Table 3. Instruction Timing for W77E468, continued
Instruction
HEX
Op-Code
Bytes
W77E468
Machine
Cycles
W77E468
Clock
cycles
8032
Clock
cycles
W77E468 vs.
8032 Speed
Ratio
SUBB A, R5
9D
1
1
4
12
3
SUBB A, R6
9E
1
1
4
12
3
SUBB A, R7
9F
1
1
4
12
3
SUBB A, @R0
96
1
1
4
12
3
SUBB A, @R1
97
1
1
4
12
3
SUBB A, direct
95
2
2
8
12
1.5
SUBB A, #data
94
2
2
8
12
1.5
XCH A, R0
C8
1
1
4
12
3
XCH A, R1
C9
1
1
4
12
3
XCH A, R2
CA
1
1
4
12
3
XCH A, R3
CB
1
1
4
12
3
XCH A, R4
CC
1
1
4
12
3
XCH A, R5
CD
1
1
4
12
3
XCH A, R6
CE
1
1
4
12
3
XCH A, R7
CF
1
1
4
12
3
XCH A, @R0
C6
1
1
4
12
3
XCH A, @R1
C7
1
1
4
12
3
XCHD A, @R0
D6
1
1
4
12
3
XCHD A, @R1
D7
1
1
4
12
3
XCH A, direct
C5
2
2
8
12
1.5
XRL A, R0
68
1
1
4
12
3
XRL A, R1
69
1
1
4
12
3
XRL A, R2
6A
1
1
4
12
3
XRL A, R3
6B
1
1
4
12
3
XRL A, R4
6C
1
1
4
12
3
XRL A, R5
6D
1
1
4
12
3
XRL A, R6
6E
1
1
4
12
3
XRL A, R7
6F
1
1
4
12
3
XRL A, @R0
66
1
1
4
12
3
XRL A, @R1
67
1
1
4
12
3
XRL A, direct
65
2
2
8
12
1.5
XRL A, #data
64
2
2
8
12
1.5
XRL direct, A
62
2
2
8
12
1.5
XRL direct, #data
63
3
3
12
24
2
INSTRUCTION TIMING
The instruction timing for the W77E468 is an important aspect, especially for those users who wish to
use software instructions to generate timing delays. Also, it provides the user with an insight into the
timing differences between the W77E468 and the standard 8032. In the W77E468 each machine cycle is
four clock periods long. Each clock period is designated a state. Thus each machine cycle is made up
of four states, C1, C2 C3 and C4, in that order. Due to the reduced time for each instruction execution,
both the clock edges are used for internal timing. Hence it is important that the duty cycle of the clock
be as close to 50% as possible to avoid timing conflicts. As mentioned earlier, the W77E468 does one
op-code fetch per machine cycle. Therefore, in most of the instructions, the number of machine cycles
needed to execute the instruction is equal to the number of bytes in the instruction. Of the 256 available
op-codes, 128 of them are single cycle instructions. Thus more than half of all op-codes in the W77E468
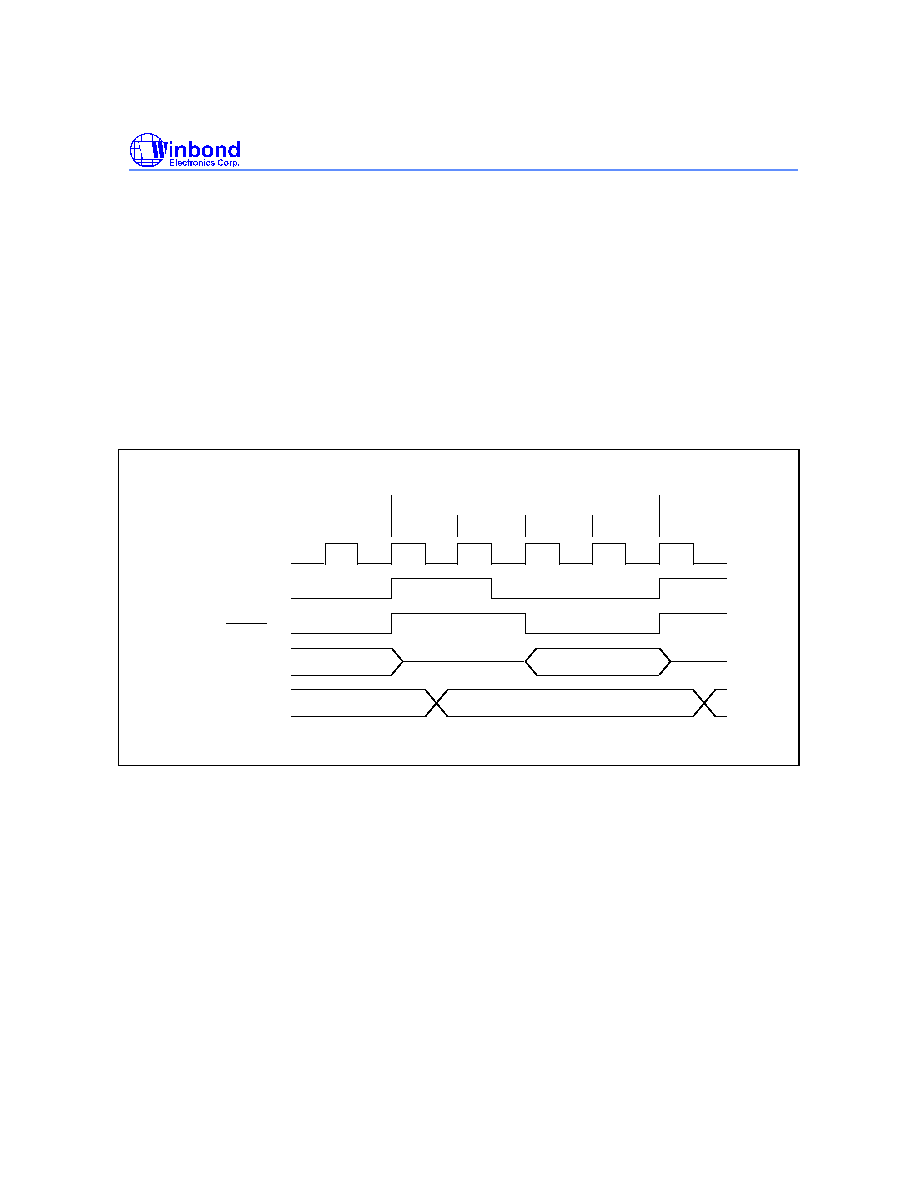
Preliminary W77E468
Publication Release Date: January 1999
- 37 - Revision A1
are executed in just four clock periods. Most of the two-cycle instructions are those that have two byte
instruction codes. However there are some instructions that have only one byte instructions, yet they are
two cycle instructions. One instruction which is of importance is the MOVX instruction. In the standard
8032, the MOVX instruction is always two machine cycles long. However in the W77E468, the user has
a facility to stretch the duration of this instruction from 2 machine cycles to 9 machine cycles. The RD
and WR strobe lines are also proportionately elongated. This gives the user flexibility in accessing both
fast and slow peripherals without the use of external circuitry and with minimum software overhead. The
rest of the instructions are either three, four or five machine cycle instructions. Note that in the
W77E468, based on the number of machine cycles, there are five different types, while in the standard
8032 there are only three. However, in the W77E468 each machine cycle is made of only 4 clock
periods compared to the 12 clock periods for the standard 8032. Therefore, even though the number of
categories has increased, each instruction is at least 1.5 to 3 times faster than the standard 8032 in
terms of clock periods.
Single Cycle
C4
C3
C2
C1
CLK
ALE
PSEN
D7-0
A15-0
Address A15-0
Data_ in D7-0
Figure 3. Single Cycle Instruction Timing
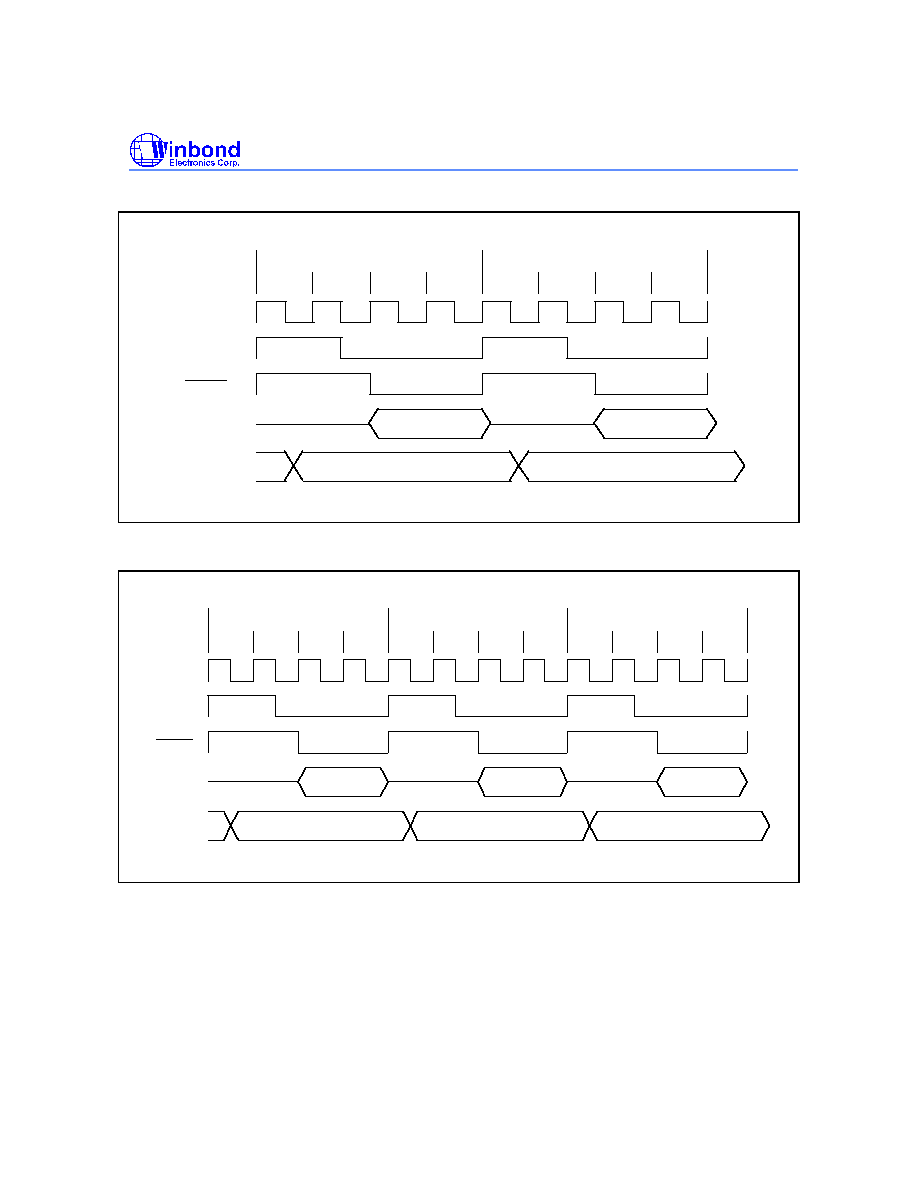
Preliminary W77E468
- 38 -
Instruction Fetch
C4
C3
C2
C1
OP-CODE
Address A15-0 (PC+1)
Address A15-0 (PC)
ALE
PSEN
D7-0
A15-0
CLK
Operand Fetch
C4
C3
C2
C1
OPERAND
Figure 4. Two Cycle Instruction Timing
OPERAND
OPERAND
OP-CODE
Address A15-0
Address A15-0
Address A15-0
Operand Fetch
Operand Fetch
Instruction Fetch
C2
C3
C4
C2
C3
C4
C4
C3
C2
C1
C1
C1
CLK
ALE
PSEN
D7-0
A15-0
Figure 5. Three Cycle Instruction Timing
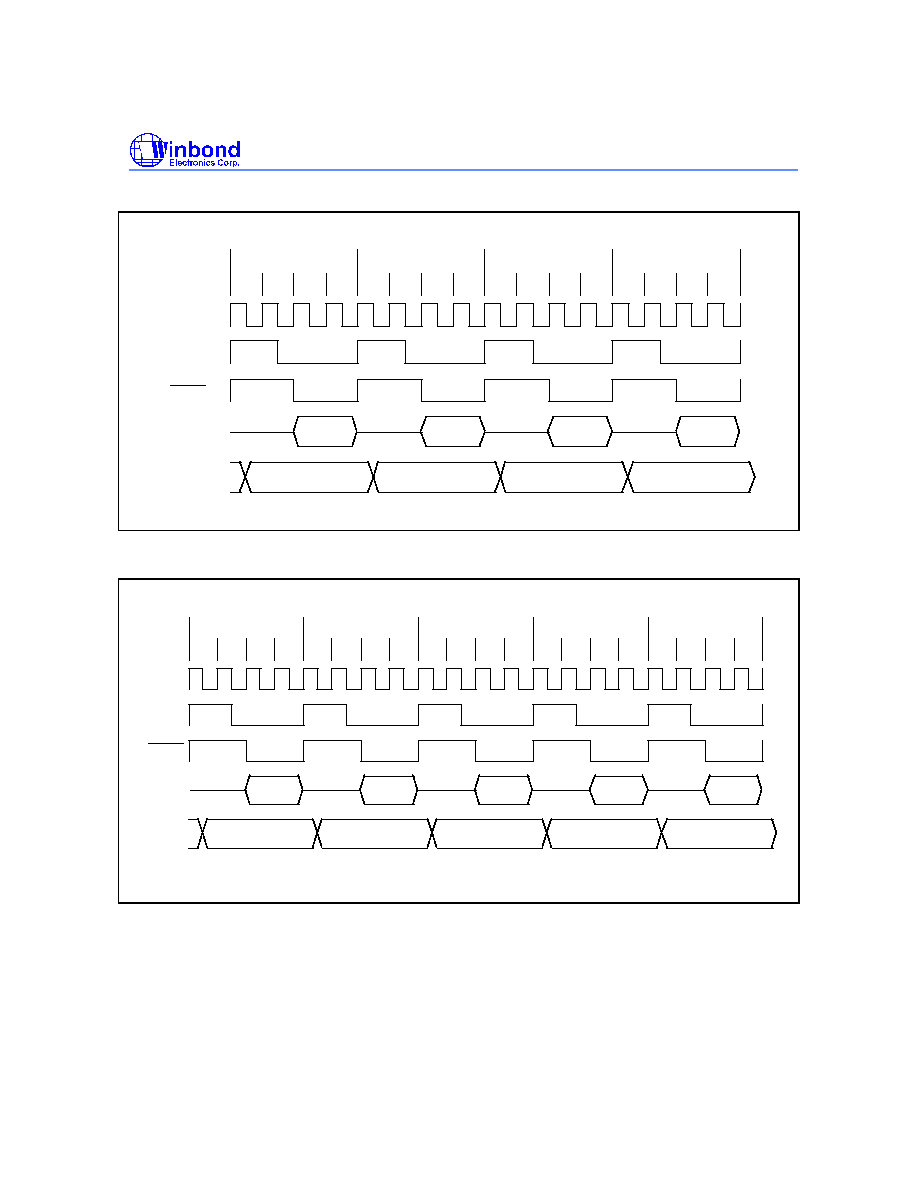
Preliminary W77E468
Publication Release Date: January 1999
- 39 - Revision A1
OPERAND
OPERAND
OPERAND
OP-CODE
Address A15-0
Address A15-0
Address A15-0
Address A15-0
Operand Fetch
Operand Fetch
Operand Fetch
Instruction Fetch
C2
C1
C4
C3
C2
C1
CLK
ALE
PSEN
D7-0
A15-0
C4
C3
C2
C1
C4
C3
C2
C1
C4
C3
Figure 6. Four Cycle Instruction Timing
OPERAND
OPERAND
OPERAND
OP-CODE
Address A15-0
8
Address A15-0
8
Address A15-0
Address A15-0
Operand Fetch
Operand Fetch
Operand Fetch
Operand Fetch
Instruction Fetch
C2
C1
C4
C3
C2
C1
CLK
ALE
PSEN
D7-0
A15-0
C4
C3
C2
C1
C4
C3
C2
C1
C4
C3
C2
C1
C4
C3
OPERAND
Address A15-0
8
Figure 7. Five Cycle Instruction Timing
Preliminary W77E468
- 40 -
MOVX Instruction
The W77E468, like the standard 8032, uses the MOVX instruction to access external Data Memory.
This Data Memory includes both off-chip memory as well as memory mapped peripherals. While the
results of the MOVX instruction are the same as in the standard 8032, the operation and the timing of
the strobe signals have been modified in order to give the user much greater flexibility.
The MOVX instruction is of two types, the MOVX @Ri and MOVX @DPTR. In the MOVX @Ri, the
address of the external data comes from two sources. The lower 8-bits of the address are stored in the
Ri register of the selected working register bank. The upper 8-bits of the address comes from the HB
SFR. In the MOVX @DPTR type, the full 16-bit address is supplied by the Data Pointer.
Since the W77E468 has two Data Pointers, DPTR and DPTR1, the user has to select between the two
by setting or clearing the DPS bit. The Data Pointer Select bit (DPS) is the LSB of the DPS SFR, which
exists at location 86h. No other bits in this SFR have any effect, and they are set to 0. When DPS is 0,
then DPTR is selected, and when set to 1, DPTR1 is selected. The user can switch between DPTR and
DPTR1 by toggling the DPS bit. The quickest way to do this is by the INC instruction. The advantage of
having two Data Pointers is most obvious while performing block move operations. The accompanying
code shows how the use of two separate Data Pointers speeds up the execution time for code
performing the same task.
Examples:
Block Move with single Data Pointer:
; SH and SL are the high and low bytes of Source Address
; DH and DL are the high and low bytes of Destination Address
; CNT is the number of bytes to be moved
Machine cycles of W77E468
#
MOV R2, #CNT
; Load R2 with the count value
2
MOV R3, #SL
; Save low byte of Source Address in R3
2
MOV R4, #SH
; Save high byte of Source address in R4
2
MOV R5, #DL
; Save low byte of Destination Address in R5
2
MOV R6, #DH
; Save high byte of Destination address in R6
2
LOOP:
MOV DPL, R3
; Load DPL with low byte of Source address
2
MOV DPH, R4
; Load DPH with high byte of Source address
2
MOVX A, @DPTR
; Get byte from Source to Accumulator
2
INC
DPTR
; Increment Source Address to next byte
2
MOV R3, DPL
; Save low byte of Source address in R3
2
MOV R4, DPH
; Save high byte of Source Address in R4
2
MOV DPL, R5
; Load low byte of Destination Address in DPL
2
MOV DPH, R6
; Load high byte of Destination Address in DPH
2
MOVX @DPTR, A
; Write data to destination
2
INC
DPTR
; Increment Destination Address
2
MOV DPL, R5
; Save low byte of new destination address in R5
2
MOV DPH, R6
; Save high byte of new destination address in R6 2
DJNZ R2, LOOP
; Decrement count and do LOOP again if count <> 0
2
Preliminary W77E468
Publication Release Date: January 1999
- 41 - Revision A1
Machine cycles in standard 8032 = 10 + (26 * CNT)
Machine cycles in W77E468 = 10 + (26 * CNT)
If CNT = 50
Clock cycles in standard 8032 = ((10 + (26 *50)) * 12 = (10 + 1300) * 12 = 15720
Clock cycles in W77E468 = ((10 + (26 * 50)) * 4 = (10 + 1300) * 4 = 5240
Block Move with Two Data Pointers in W77E468:
; SH and SL are the high and low bytes of Source Address
; DH and DL are the high and low bytes of Destination Address
; CNT is the number of bytes to be moved
Machine cycles of W77E468
#
MOV R2, #CNT
; Load R2 with the count value
2
MOV DPS, #00h
; Clear DPS to point to DPTR
2
MOV DPTR, #DHDL ; Load DPTR with Destination address
3
INC
DPS
; Set DPS to point to DPTR1
2
MOV DPTR, #SHSL ; Load DPTR1 with Source address
3
LOOP:
MOVX A, @DPTR
; Get data from Source block
2
INC
DPTR
; Increment source address
2
DEC
DPS
; Clear DPS to point to DPTR
2
MOVX @DPTR, A
; Write data to Destination
2
INC
DPTR
; Increment destination address
2
INC
DPS
; Set DPS to point to DPTR1
2
DJNZ R2, LOOP
; Check if all done
3
Machine cycles in W77E468 = 12 + (15 * CNT)
If CNT = 50
Clock cycles in W77E468 = (12 + (15 * 50)) * 4 = (12 + 750) * 4 = 3048
We can see that in the first program the standard 8032 takes 15720 cycles, while the W77E468 takes
only 5240 cycles for the same code. In the second program, written for the W77E468, program
execution requires only 3048 clock cycles. If the size of the block is increased then the saving is even
greater.
External Data Memory Access Timing:
The timing for the MOVX instruction is another feature of the W77E468. In the standard 8032, the MOVX
instruction has a fixed execution time of 2 machine cycles. However in the W77E468, the duration of the
access can be varied by the user.
Preliminary W77E468
- 42 -
The instruction starts off as a normal op-code fetch of 4 clocks. In the next machine cycle, the W77E468
puts out the address of the external Data Memory and the actual access occurs here. The user can
change the duration of this access time by setting the STRETCH value. The Clock Control SFR
(CKCON) has three bits that control the stretch value. These three bits are M2-0 (bits 2-0 of CKCON).
These three bits give the user 8 different access time options. The stretch can be varied from 0 to 7,
resulting in MOVX instructions that last from 2 to 9 machine cycles in length. Note that the stretching of
the instruction only results in the elongation of the MOVX instruction, as if the state of the CPU was held
for the desired period. There is no effect on any other instruction or its timing. By default, the Stretch
value is set at 1, giving a MOVX instruction of 3 machine cycles. If desired by the user the stretch value
can be set to 0 to give the fastest MOVX instruction of only 2 machine cycles.
Table 4. Data Memory Cycle Stretch Values
M2
M1
M0
Machine
Cycles
RD
or
WR
strobe width
in Clocks
RD
or
WR
strobe width
@25 MHz
RD
or
WR
strobe width
@40 MHz
0
0
0
2
2
80 nS
50 nS
0
0
1
3(default)
4
160 nS
100 nS
0
1
0
4
8
320 nS
200 nS
0
1
1
5
12
480 nS
300 nS
1
0
0
6
16
640 nS
400 nS
1
0
1
7
20
800 nS
500 nS
1
1
0
8
24
960 nS
600 nS
1
1
1
9
28
1120 nS
700 nS
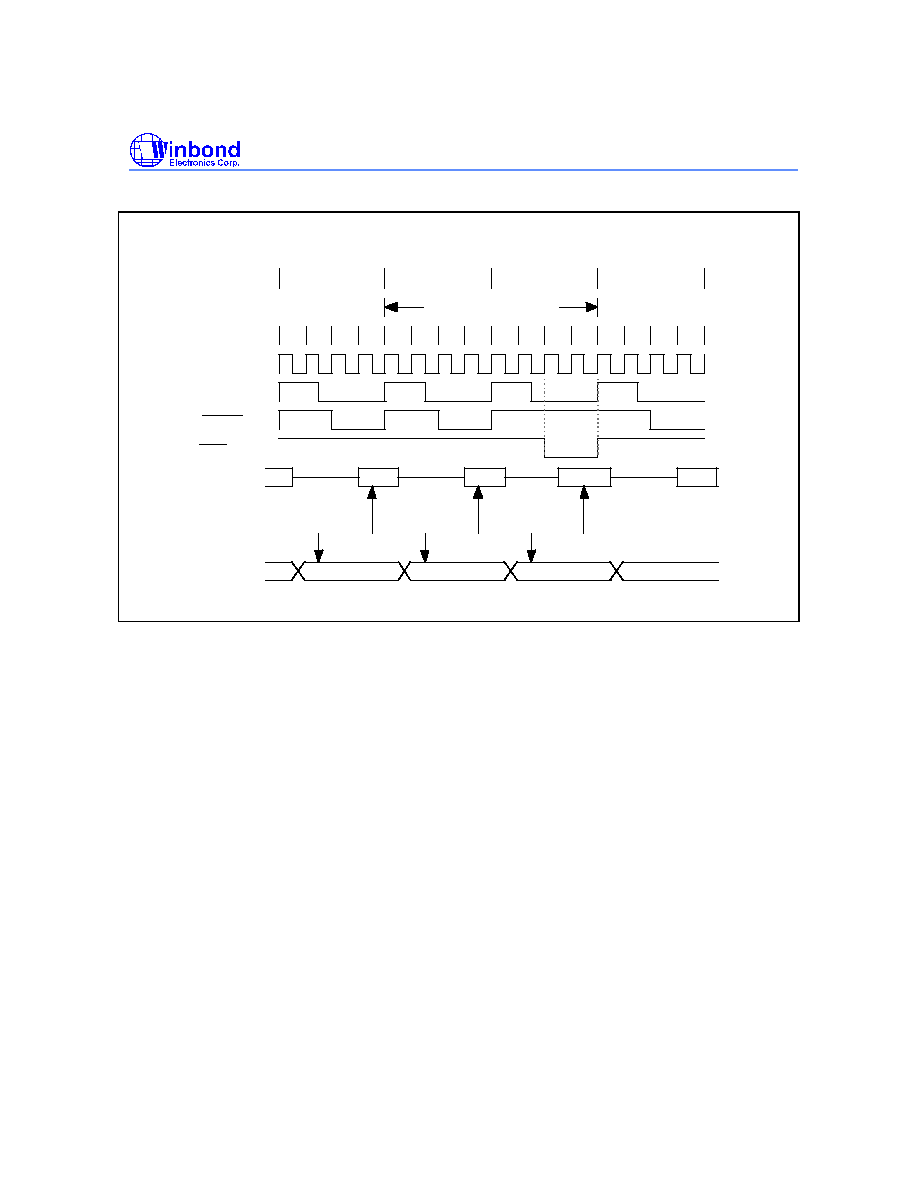
Preliminary W77E468
Publication Release Date: January 1999
- 43 - Revision A1
Next Instruction
Machine Cycle
Second
Machine cycle
First
Machine cycle
Last Cycle
of Previous
Instruction
C4
A15-0
D7-0
WR
PSEN
ALE
CLK
C3
C2
D0-D7
D0-D7
D0-D7
D0-D7
A15-A0
A15-A0
A15-A0
A15-A0
C1
C4
C3
C2
C1
C4
C3
C2
C1
C4
C3
C2
C1
MOVX instruction cycle
Next Inst. Read
Next Inst.
Address
MOVX Data out
MOVX Data
Address
MOVX Inst.
Address
MOVX Inst
.
Figure 8. Data Memory Write with Stretch Value = 0
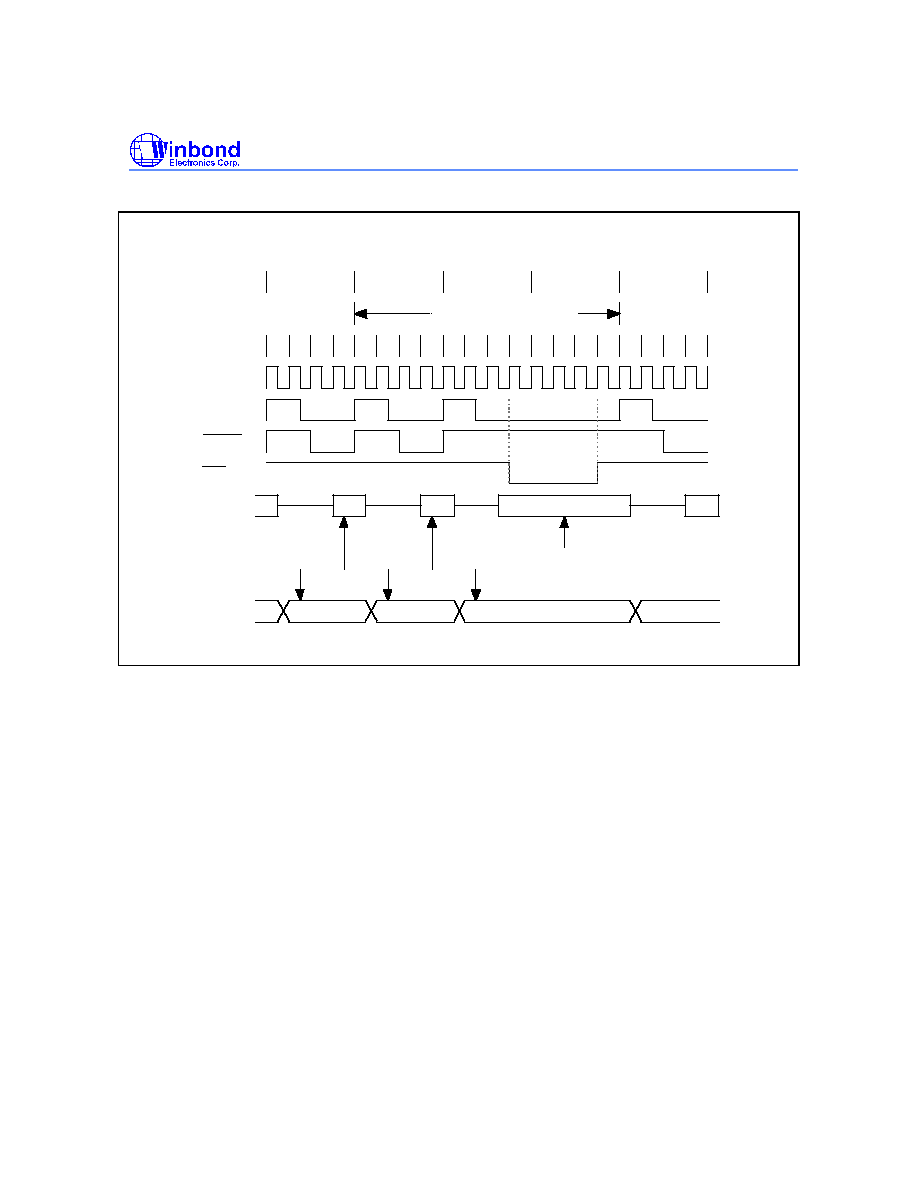
Preliminary W77E468
- 44 -
Next Instruction
Machine Cycle
Third
Machine Cycle
Second
Machine Cycle
First
Machine Cycle
Last Cycle
of Previous
Instruction
C4
A15-0
D7-0
WR
PSEN
ALE
CLK
C3
C2
D0-D7
D0-D7
D0-D7
D0-D7
A15-A0
A15-A0
A15-A0
A15-A0
C1
C4
C3
C2
C1
C4
C3
C2
C1
C4
C3
C2
C1
MOVX instruction cycle
Next Inst.
Read
Next Inst.
Address
MOVX Data out
MOVX Data
Address
MOVX Inst.
Address
MOVX Inst.
C4
C3
C2
C1
Figure 9. Data Memory Write with Stretch Value = 1
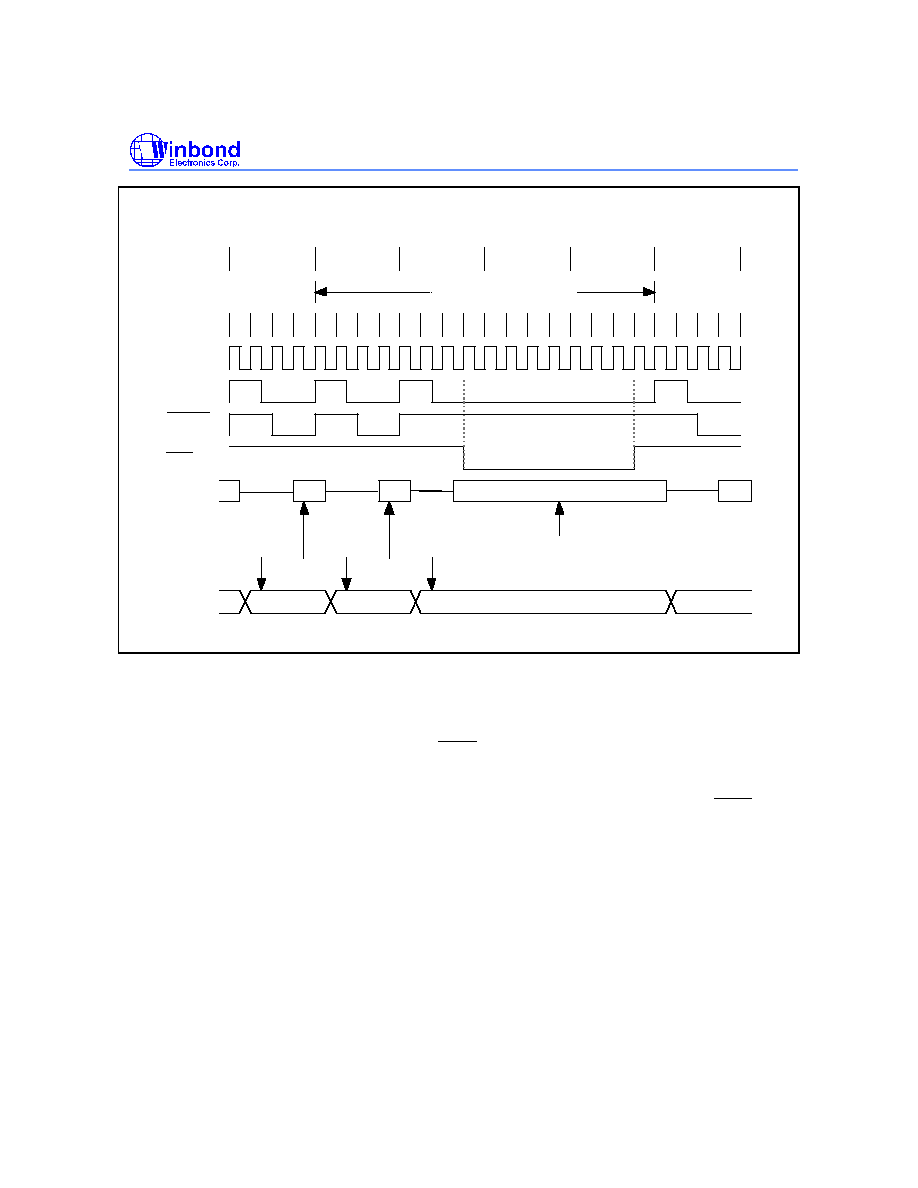
Preliminary W77E468
Publication Release Date: January 1999
- 45 - Revision A1
Next
Instruction
Machine Cycle
Fourth
Machine Cycle
Third
Machine Cycle
Second
Machine Cycle
First
Machine Cycle
Last Cycle
of Previous
Instruction
C4
A15-0
D7-0
WR
PSEN
ALE
CLK
C3
C2
D0-D7
D0-D7
D0-D7
D0-D7
A15-A0
A15-A0
A15-A0
A15-A0
C1
C4
C3
C2
C1
C4
C3
C2
C1
C4
C3
C2
C1
MOVX instruction cycle
Next Inst.
Read
Next Inst.
Address
MOVX Data out
MOVX Data
Address
MOVX Inst.
Address
MOVX Inst.
C4
C3
C2
C1
C4
C3
C2
C1
Figure 10. Data Memory Write with Stretch Value = 2
Wait State Control Signal
Either with the software using stretch value to change the required machine cycle of MOVX instruction,
the W77E468 provides another hardware signal
WAIT
to implement the wider duration of external data
access timing. This wait state control signal is the alternate function of P6.0. The wait state control
signal can be enabled by setting WS (ROMMAP.7) bit. When enabled, the setting of stretch value
decides the minimum length of MOVX instruction cycle and the device will sample the
WAIT
pin at
each C3 state before the rising edge of read/write strobe signal during MOVX instruction. Once this
signal being recongnized, one more machine cycle (wait state cycle) will be inserted into next cycle. The
inserted wait state cycles are unlimited, so the MOVX instruction cycle will end in which the wait state
control signal is deactivated. Using wait state control signal allows a dynamically access timimg to a
selected external peripheral. The WS bit is accessed by the Timed Access Protection procedure.
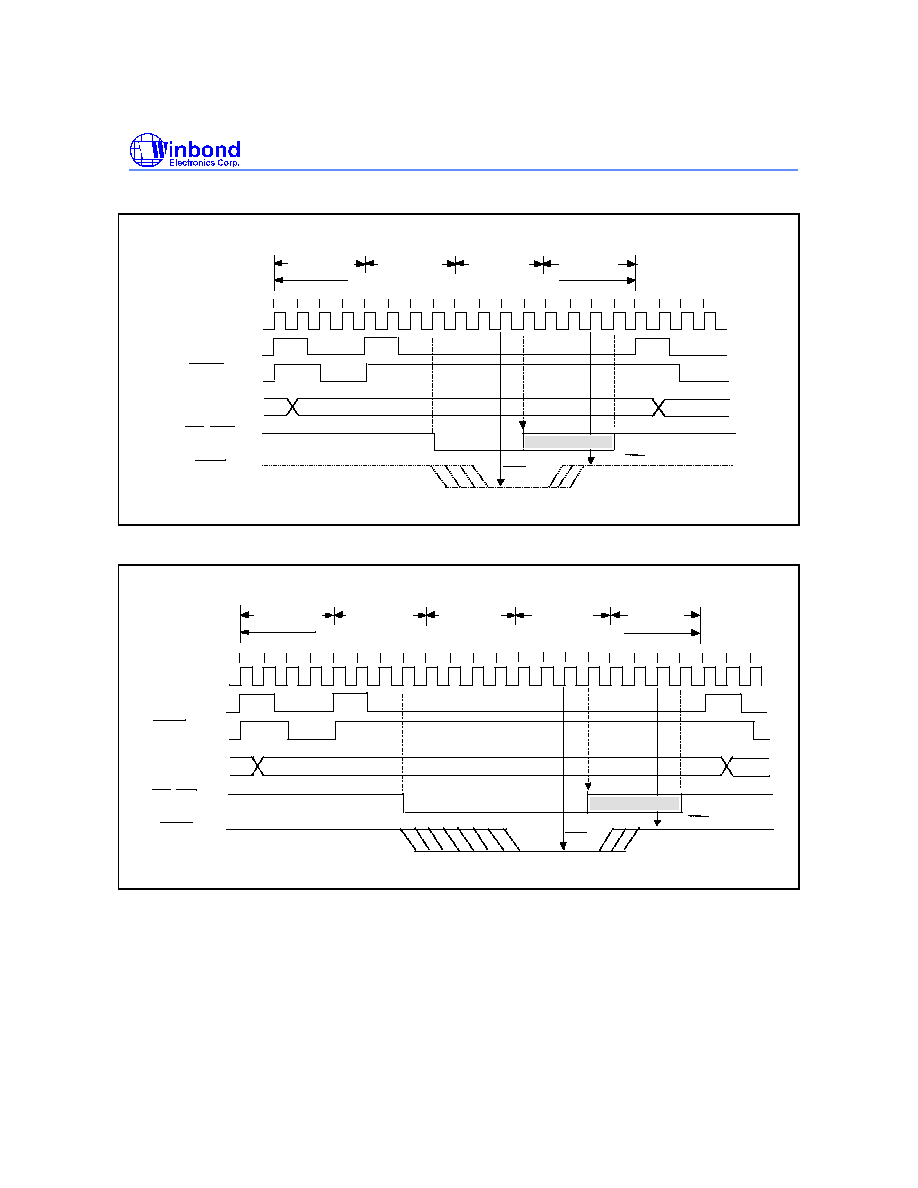
Preliminary W77E468
- 46 -
Wait State Control Signal Timing ( when Stretch = 1 )
C2 C3 C4
C1
CLOCK
ALE
PSEN
ADDRESS
RD / WR
C2 C3 C4
C1
C2 C3 C4
C1
C2 C3 C4
C1
C2 C3 C4
C1
MOVX Instruction
First
Machine
Cycle
Second
Machine
Cycle
Wait-State
Cycle
Third
Machine
Cycle
WAIT
sample
WAIT
sample WAIT
Extended duration
original rising edge
Wait State Control Signal Timing ( when Stretch = 2 )
C2 C3 C4
C1
CLOCK
ALE
PSEN
ADDRESS
RD / WR
C2 C3 C4
C1
C2 C3 C4
C1
C2 C3 C4
C1
C3 C4
C2
C1
MOVX Instruction
First
Machine
Cycle
Second
Machine
Cycle
Wait-State
Cycle
Third
Machine
Cycle
WAIT
sample
WAIT
sample WAIT
Extended duration
original rising edge
C2
C1
Cycle
Fourth
Machine
POWER MANAGEMENT
The W77E468 has several features that help the user to modify the power consumption of the device and
to preclude loss of control due to power-failure. The power saving features are basically the POWER
DOWN mode, ECONOMY mode and the IDLE mode of operation.
Preliminary W77E468
Publication Release Date: January 1999
- 47 - Revision A1
Idle Mode
The user can put the device into idle mode by writing 1 to the bit PCON.0. The instruction that sets the
idle bit is the last instruction that will be executed before the device goes into Idle Mode. In the Idle
mode, the clock to the CPU is halted, but not to the Interrupt, Timer, Watchdog timer and Serial port
blocks. This forces the CPU state to be frozen; the Program counter, the Stack Pointer, the Program
Status Word, the Accumulator and the other registers hold their contents. The ALE and
PSEN
pins are
held high during the Idle state. The port pins hold the logical states they had at the time Idle was
activated. The Idle mode can be terminated in two ways. Since the interrupt controller is still active, the
activation of any enabled interrupt can wake up the processor. This will automatically clear the Idle bit,
terminate the Idle mode, and the Interrupt Service Routine(ISR) will be executed. After the ISR, execution
of the program will continue from the instruction which put the device into Idle mode.
The Idle mode can also be exited by activating the reset. The device can be put into reset either by
applying a high on the external RST pin, a Power on/fail reset condition or a Watchdog timer reset. The
external reset pin has to be held high for at least two machine cycles i.e. 8 clock periods to be
recognized as a valid reset. In the reset condition the program counter is reset to 0000h and all the
SFRs are set to the reset condition. Since the clock is already running there is no delay and execution
starts immediately. In the Idle mode, the Watchdog timer continues to run, and if enabled, a time-out will
cause a watchdog timer interrupt which will wake up the device. The software must reset the Watchdog
timer in order to preempt the reset which will occur after 512 clock periods of the time-out. When the
W77E468 is exiting from an Idle mode with a reset, the instruction following the one which put the device
into Idle mode is not executed. So there is no danger of unexpected writes.
Economy Mode
The power consumption of microcontroller relates to operating frequency. The W77E468 offers a
Economy mode to reduce the internal clock rate dynamically without external components. By default,
one machine cycle needs 4 clocks. In Economy mode, software can select 4, 64 or 1024 clocks per
machine cycle. It keeps the CPU operating at a acceptable speed but eliminates the power
consumption. In the Idle mode, the clock of the core logic is stopped, but all clocked peripherals such as
watchdog timer are still running at a rate of clock/4. In the Economy mode, all clocked peripherals run at
the same reduced clocks rate as in core logic. So the Economy mode may provide a lower power
consumption than idle mode.
Software invokes the Economy mode by setting the appropriate bits in the SFRs. Setting the bits
CD0(PMR.6), CD1(PMR.7) decides the instruction cycle rate as below:
CD1 CD0 clocks/machine cycle
0 0 Reserved
0 1 4 (default)
1 0 64
1 1 1024
Preliminary W77E468
- 48 -
The selection of instruction rate is going to take effect after a delay of one instruction cycle. Switching to
divide by 64 or 1024 mode must first go from divide by 4 mode. This means software can not switch
directly between clock/64 and clock/1024 mode. The CPU has to return clock/4 mode first, then go to
clock/64 or clock/1024 mode.
The W77E468 allows the user to use internal RC oscillator instead of external crystal. Setting the
XT/
RG
bit (EXIF.3) selects the crystal or RC oscillator as the clock source. When invoking RC oscillator
in Economy mode, software may set the XTOFF bit to turn off the crystal amplifier for saving power. The
CPU would run at the clock rate of approximately 2
-
4 MHz divided by 4, 64 or 1024. The RC oscillator is
not precise so that can not be invoked to the operation which needs the accurate time-base such as
serial communication. The RGMD(EXIF.2) indicates current clock source. When switching the clock
source, CPU needs one instruction cycle delay to take effect new setting. If crystal amplifier is disabled
and RC oscillator is present clock source, software must first clear the XTOFF bit to turn on crystal
amplifier before switch to crystal operation. Hardware will set the XTUP bit (STATUS.4) once the crystal
is warm-up and ready for use. It is unable to set XT/
RG
bit to 1 if XTUP = 0.
In Economy mode, the serial port can not receive/transmit data correctly because the baud rate is
changed. In some systems, the external interrupts may require the fastest process such that the
reducing of operating speed is restricted. In order to solve these dilemmas, the W77E468 offers a
switchback feature which allows the CPU back to clock/4 mode immediately when triggered by serial
operation or external interrupts. The switchback feature is enabled by setting the SWB bit (PMR.5). A
serial port reception/transmission or qualified external interrupt which is enabled and acknowledged
without block conditions will cause CPU to return to divide by 4 mode. For the serial port reception, a
switchback is generated by a falling edge associated with start bit if the serial port reception is enabled.
When a serial port transmission, an instruction which writes a byte of data to serial port buffer will cause
a switchback to ensure the correct transmission. The switchback feature is unaffected by serial port
interrupt flags. After a switchback is generated, the software can manually return the CPU to Economy
mode. Note that the modification of clock control bits CD0 and CD1 will be ignored during serial port
transmit/receive when switchback is enabled. The Watchdog timer reset, power-on/fail reset or external
reset will force the CPU to return to divide by 4 mode.
Power Down Mode
The device can be put into Power Down mode by writing 1 to bit PCON.1. The instruction that does this
will be the last instruction to be executed before the device goes into Power Down mode. In the Power
Down mode, all the clocks are stopped and the device comes to a halt. All activity is completely stopped
and the power consumption is reduced to the lowest possible value. In this state the ALE and
PSEN
pins are pulled low. The port pins output the values held by their respective SFRs.
The W77E468 will exit the Power Down mode with a reset or by an external interrupt pin enabled as level
detect. An external reset can be used to exit the Power down state. The high on RST pin terminates the
Power Down mode, and restarts the clock. The on-chip hardware will now provide a delay of 65536 clock,
which is used to provide time for the oscillator to restart and stabilize. Once this delay is complete an
internal reset is activated and the program execution will restart from 0000h. In the Power down mode,
the clock is stopped, so the Watchdog timer cannot be used to provide the reset to exit Power down
mode.
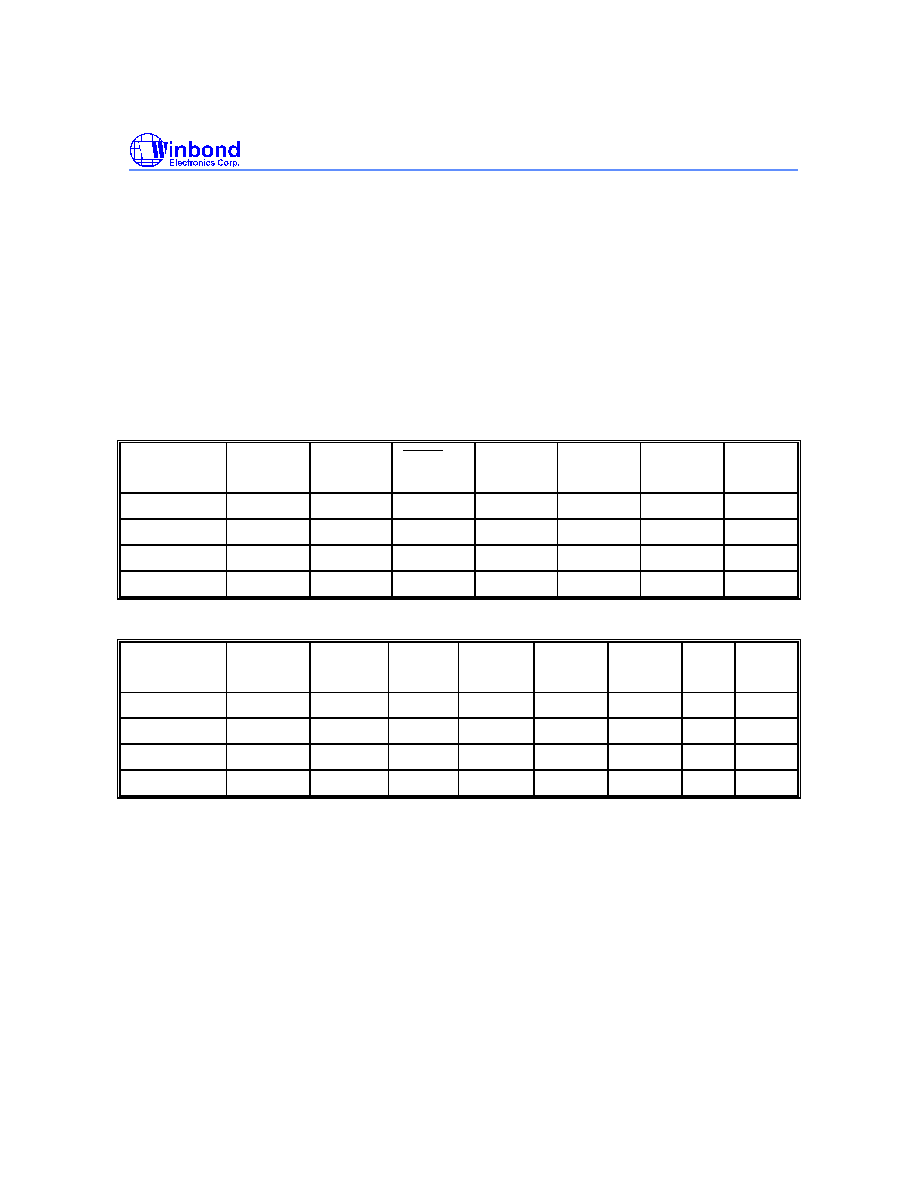
Preliminary W77E468
Publication Release Date: January 1999
- 49 - Revision A1
The W77E468 can be woken from the Power Down mode by forcing an external interrupt pin activated,
provided the corresponding interrupt is enabled, while the global enable(EA) bit is set and the external
input has been set to a level detect mode. If these conditions are met, then the low level on the external
pin re-starts the oscillator. The device will experience a warm-up delay of 65536 clock cycles to ensure
the oscillation stabilize. Then device executes the interrupt service routine for the corresponding external
interrupt. After the interrupt service routine is completed, the program execution returns to the instruction
after the one which put the device into Power Down mode and continues from there. When RGSL(EXIF.1)
bit is set to 1, the CPU will use the internal RC oscillator instead of crystal to exit Power Down mode.
The microcontroller will automatically switch from RC oscillator to crystal after a warm-up delay of 65536
crystal clocks. The RC oscillator runs at approximately 2
-
4 MHz. Using RC oscillator to exit from Power
Down mode saves the time for waiting crystal start-up. It is useful in the low power system which usually
be awakened from a short operation then returns to Power Down mode.
Table 5-1. Status of external pins during Idle and Power Down
Mode
Program
Memory
ALE
PSEN
PORT0
PORT1
PORT2
PORT3
Idle
Internal
1
1
Data
Data
Data
Data
Idle
External
1
1
Float
Data
Data
Data
Power Down
Internal
0
0
Data
Data
Data
Data
Power Down
External
0
0
Float
Data
Data
Data
Table 5-2. Status of external pins during Idle and Power Down
Mode
Program
Memory
A15
-
A0
D7
-
D0
PORT4
PORT5
PORT6
RD
WR
Idle
Internal
Address
Float
Data
Data
Data
1
1
Idle
External
Address
Float
Data
Data
Data
1
1
Power Down
Internal
Address
Float
Data
Data
Data
1
1
Power Down
External
Address
Float
Data
Data
Data
1
1
RESET CONDITIONS
The user has several hardware related options for placing the W77E468 into reset condition. In general,
most register bits go to their reset value irrespective of the reset condition, but there are a few flags
whose state depends on the source of reset. The user can use these flags to determine the cause of
reset using software. There are three ways of putting the device into reset state. They are External reset,
Power on reset and Watchdog reset.
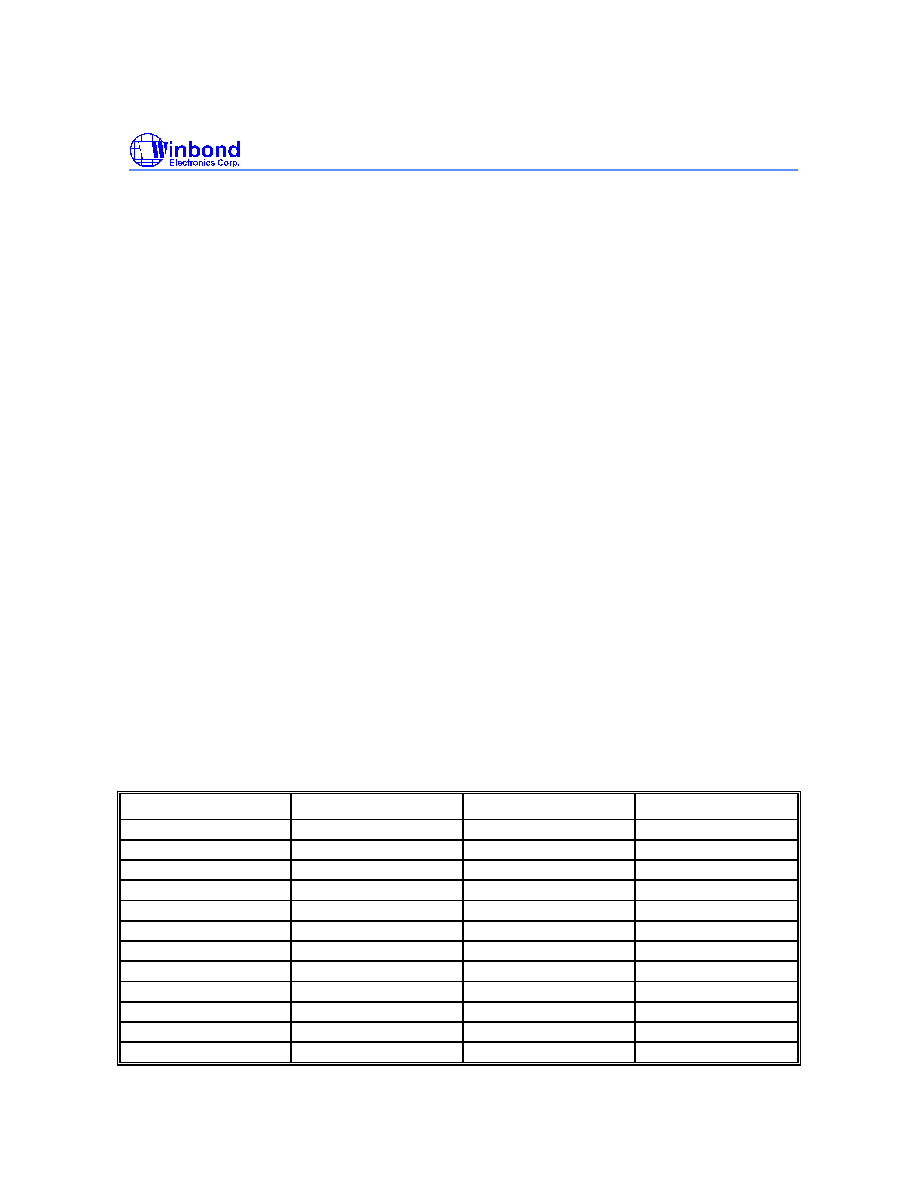
Preliminary W77E468
- 50 -
External Reset
The device continuously samples the RST pin at state C4 of every machine cycle. Therefore the RST pin
must be held for at least 2 machine cycles to ensure detection of a valid RST high. The reset circuitry
then synchronously applies the internal reset signal. Thus the reset is a synchronous operation and
requires the clock to be running to cause an external reset.
Once the device is in reset condition, it will remain so as long as RST is 1. Even after RST is
deactivated, the device will continue to be in reset state for up to two machine cycles, and then begin
program execution from 0000h. There is no flag associated with the external reset condition. However
since the other two reset sources have flags, the external reset can be considered as the default reset if
those two flags are cleared.
Watchdog Timer Reset
The Watchdog timer is a free running timer with programmable time-out intervals. The user can clear the
watchdog timer at any time, causing it to restart the count. When the time-out interval is reached an
interrupt flag is set. If the Watchdog reset is enabled and the watchdog timer is not cleared, then 512
clocks from the flag being set, the watchdog timer will generate a reset . This places the device into the
reset condition. The reset condition is maintained by hardware for two machine cycles. Once the reset is
removed the device will begin execution from 0000h.
RESET STATE
Most of the SFRs and registers on the device will go to the same condition in the reset state. The
Program Counter is forced to 0000h and is held there as long as the reset condition is applied. However,
the reset state does not affect the on-chip RAM. The data in the RAM will be preserved during the reset.
However, the stack pointer is reset to 07h, and therefore the stack contents will be lost. The RAM
contents will be lost if the V
DD
falls below approximately 2V, as this is the minimum voltage level required
for the RAM to operate normally. Therefore after a first time power on reset the RAM contents will be
indeterminate. During a power fail condition, if the power falls below 2V, the RAM contents are lost. After
a reset most SFRs are cleared. Interrupts and Timers are disabled. The Watchdog timer is disabled if
the reset source was a POR. The port SFRs have FFh written into them which puts the port pins in a
high state. Port 0 floats as it does not have on-chip pull-ups.
Table 6. SFR Reset Value
SFR Name
Reset Value
SFR Name
Reset Value
P0
11111111b
IE
00000000b
SP
00000111b
SADDR
00000000b
DPL
00000000b
P3
11111111b
DPH
00000000b
IP
x0000000b
DPL1
00000000b
SADEN
00000000b
DPH1
00000000b
T2CON
00000000b
DPS
00000000b
T2MOD
00000x00b
PCON
00xx0000b
RCAP2L
00000000b
TCON
00000000b
RCAP2H
00000000b
TMOD
00000000b
TL2
00000000b
TL0
00000000b
TH2
00000000b
TL1
00000000b
TA
11111111b
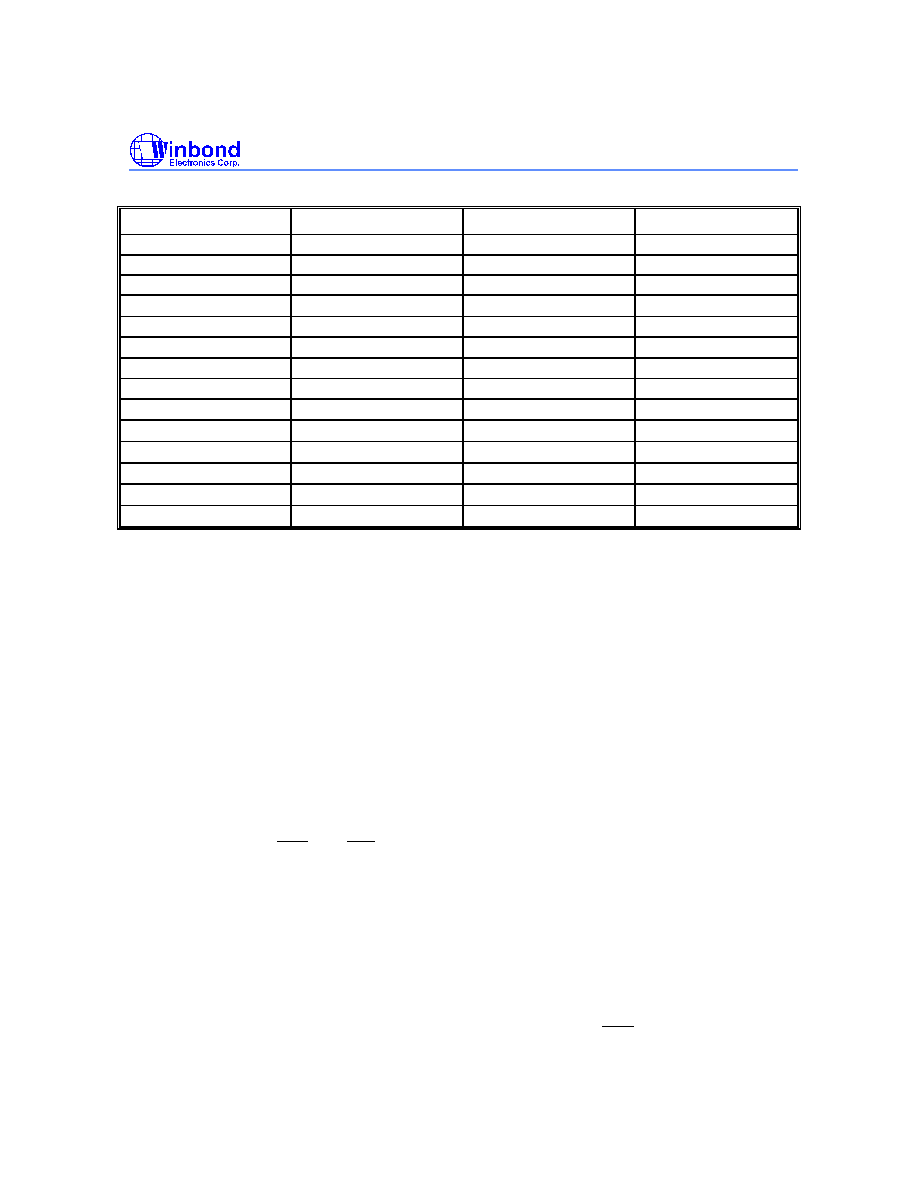
Preliminary W77E468
Publication Release Date: January 1999
- 51 - Revision A1
Table 6. SFR Reset Value, continued
SFR Name
Reset Value
SFR Name
Reset Value
TH0
00000000b
PSW
00000000b
TH1
00000000b
WDCON
0x0x0xx0b
CKCON
00000001b
ACC
00000000b
P1
11111111b
EIE
xxx
00000b
SCON
00000000b
B
00000000b
SBUF
xxxxxxxx
b
EIP
xxx00000b
P2
11111111b
PC
00000000b
SADDR1
00000000b
SADEN1
00000000b
SCON1
00000000b
SBUF1
xxxxxxxx
b
ROMMAP
01
xxx
110b
PMR
010xx0x0b
EXIF
0000
xxx
0b
STATUS
000x0000b
P4
xxxx
1111b
P4
11111111b
P5
11111111b
P6
xxxx1111b
HB
00000000b
The WDCON SFR bits are set/cleared in reset condition depending on the source of the reset.
External reset
Watchdog reset
Power on reset
WDCON
0x0x0xx0b
0x0x01x0b
01000000b
The WTRF bit WDCON.2 is set when the Watchdog timer causes a reset. A power on reset will also
clear this bit. The EWT bit WDCON.1 is cleared by power on resets. This disables the Watchdog timer
resets. A watchdog or external reset does not affect the EWT bit.
INTERRUPTS
The W77E468 has a two priority level interrupt structure with 12 interrupt sources. Each of the interrupt
sources has an individual priority bit, flag, interrupt vector and enable bit. In addition, the interrupts can
be globally enabled or disabled.
Interrupt Sources
The External Interrupts
INT0
and
INT1
can be either edge triggered or level triggered, depending on bits
IT0 and IT1. The bits IE0 and IE1 in the TCON register are the flags which are checked to generate the
interrupt. In the edge triggered mode, the INTx inputs are sampled in every machine cycle. If the sample
is high in one cycle and low in the next, then a high to low transition is detected and the interrupts
request flag IEx in TCON or EXIF is set. The flag bit requests the interrupt. Since the external interrupts
are sampled every machine cycle, they have to be held high or low for at least one complete machine
cycle. The IEx flag is automatically cleared when the service routine is called. If the level triggered mode
is selected, then the requesting source has to hold the pin low till the interrupt is serviced. The IEx flag
will not be cleared by the hardware on entering the service routine. If the interrupt continues to be held
low even after the service routine is completed, then the processor may acknowledge another interrupt
request from the same source. Note that the external interrupts INT2 to
INT5
are edge triggered only.
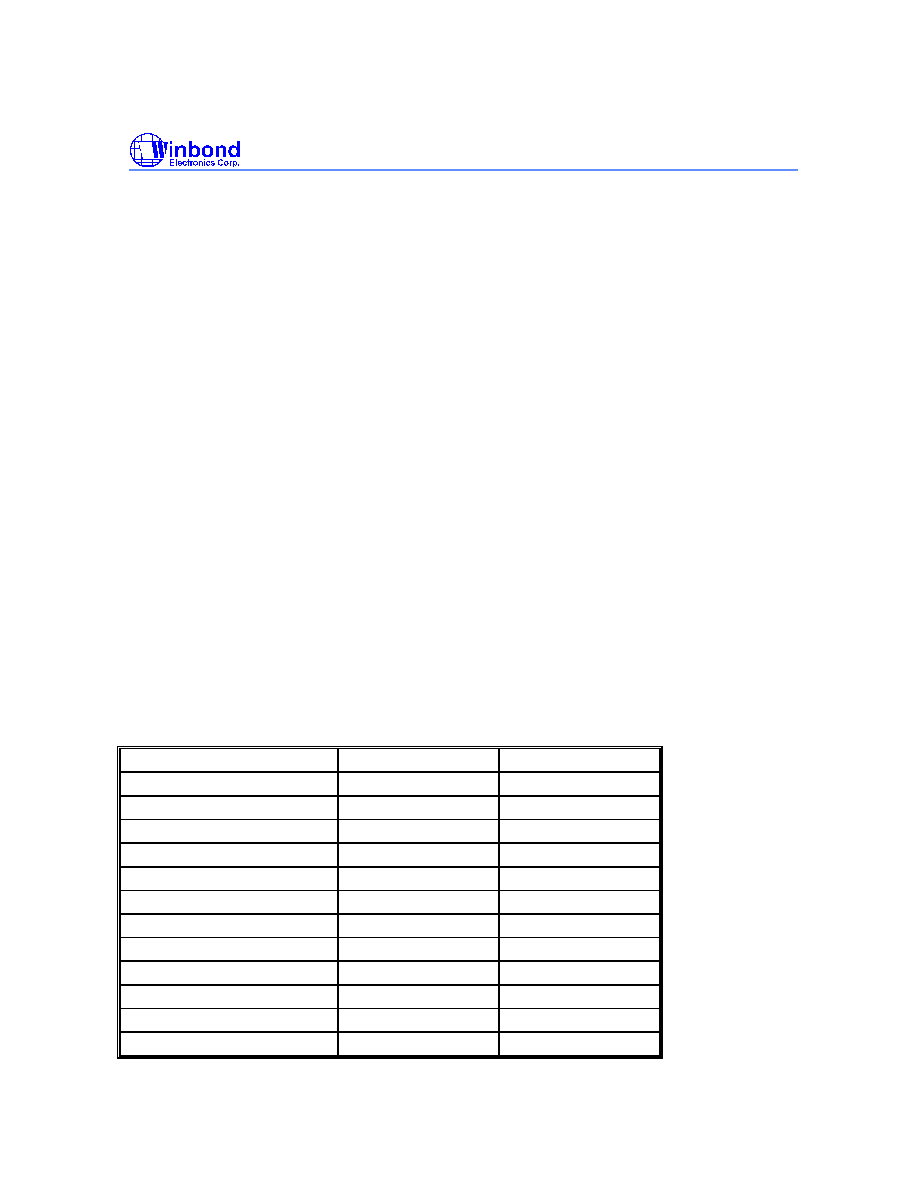
Preliminary W77E468
- 52 -
By default, the individual interrupt flag corresponding to external interrupt 2 to 5 must be cleared
manually by software. It can be configured with hardware cleared by setting the corresponding bit HCx in
the T2MOD register. For instance, if HC2 is set hardware will clear IE2 flag after program enters the
interrupt 2 service routine.
The Timer 0 and 1 Interrupts are generated by the TF0 and TF1 flags. These flags are set by the overflow
in the Timer 0 and Timer 1. The TF0 and TF1 flags are automatically cleared by the hardware when the
timer interrupt is serviced. The Timer 2 interrupt is generated by a logical OR of the TF2 and the EXF2
flags. These flags are set by overflow or capture/reload events in the timer 2 operation. The hardware
does not clear these flags when a timer 2 interrupt is executed. Software has to resolve the cause of the
interrupt between TF2 and EXF2 and clear the appropriate flag.
The Watchdog timer can be used as a system monitor or a simple timer. In either case, when the time-
out count is reached, the Watchdog timer interrupt flag WDIF (WDCON.3) is set. If the interrupt is
enabled by the enable bit EIE.4, then an interrupt will occur.
The Serial block can generate interrupts on reception or transmission. There are two interrupt sources
from the Serial block, which are obtained by the RI and TI bits in the SCON SFR and RI_1 and TI_1 in
the SCON1 SFR. These bits are not automatically cleared by the hardware, and the user will have to
clear these bits using software.
All the bits that generate interrupts can be set or reset by hardware, and thereby software initiated
interrupts can be generated. Each of the individual interrupts can be enabled or disabled by setting or
clearing a bit in the IE SFR. IE also has a global enable/disable bit EA, which can be cleared to disable
all the interrupts, except PFI, at once.
Priority Level Structure
There are two priority levels for the interrupts, high and low. The interrupt sources can be individually set
to either high or low levels. Naturally, a higher priority interrupt cannot be interrupted by a lower priority
interrupt. However there exists a pre-defined hierarchy amongst the interrupts themselves. This hierarchy
comes into play when the interrupt controller has to resolve simultaneous requests having the same
priority level. This hierarchy is defined as shown below; the interrupts are numbered starting from the
highest priority to the lowest.
Table 7. Priority structure of interrupts
Source
Flag
Priority level
External Interrupt 0
IE0
1 (highest)
Timer 0 Overflow
TF0
2
External Interrupt 1
IE1
3
Timer 1 Overflow
TF1
4
Serial Port
RI + TI
5
Timer 2 Overflow
TF2 + EXF2
6
Serial Port 1
RI_1 + TI_1
7
External Interrupt 2
IE2
8
External Interrupt 3
IE3
9
External Interrupt 4
IE4
10
External Interrupt 5
IE5
11
Watchdog Timer
WDIF
12 (lowest)
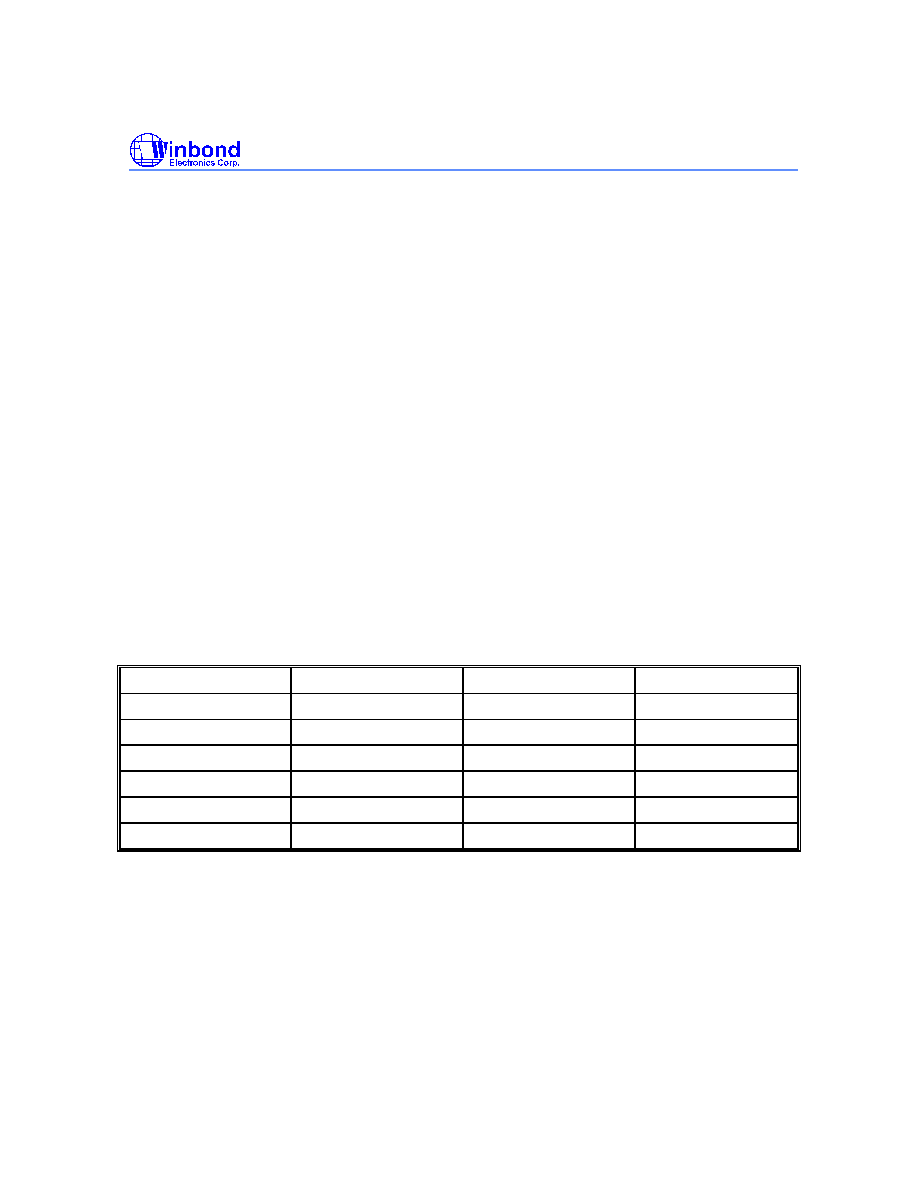
Preliminary W77E468
Publication Release Date: January 1999
- 53 - Revision A1
The interrupt flags are sampled every machine cycle. In the same machine cycle, the sampled interrupts
are polled and their priority is resolved. If certain conditions are met then the hardware will execute an
internally generated LCALL instruction which will vector the process to the appropriate interrupt vector
address. The conditions for generating the LCALL are
1. An interrupt of equal or higher priority is not currently being serviced.
2. The current polling cycle is the last machine cycle of the instruction currently being executed.
3. The current instruction does not involve a write to IP, IE, EIP or EIE registers and is not a RETI.
If any of these conditions are not met, then the LCALL will not be generated. The polling cycle is
repeated every machine cycle, with the interrupts sampled in the same machine cycle. If an interrupt flag
is active in one cycle but not responded to, and is not active when the above conditions are met, the
denied interrupt will not be serviced. This means that active interrupts are not remembered; every polling
cycle is new.
The processor responds to a valid interrupt by executing an LCALL instruction to the appropriate service
routine. This may or may not clear the flag which caused the interrupt. In case of Timer interrupts, the
TF0 or TF1 flags are cleared by hardware whenever the processor vectors to the appropriate timer service
routine. In case of external interrupt, INT0 and INT1, the flags are cleared only if they are edge triggered.
In case of Serial interrupts, the flags are not cleared by hardware. In the case of Timer 2 interrupt, the
flags are not cleared by hardware. Watchdog timer interrupt flag WDIF have to be cleared by software.
The hardware LCALL behaves exactly like the software LCALL instruction. This instruction saves the
Program Counter contents onto the Stack, but does not save the Program Status Word PSW. The PC is
reloaded with the vector address of that interrupt which caused the LCALL. These vector address for the
different sources are as follows
Table 8. Vector locations for interrupt sources
Source
Vector Address
Source
Vector Address
Timer 0 Overflow
000Bh
External Interrupt 0
0003h
Timer 1 Overflow
001Bh
External Interrupt 1
0013h
Timer 2 Interrupt
002Bh
Serial Port
0023h
External Interrupt 2
0043h
Serial Port 1
003Bh
External Interrupt 4
0053h
External Interrupt 3
004Bh
Watchdog Timer
0063h
External Interrupt 5
005Bh
The vector table is not evenly spaced; this is to accommodate future expansions to the device family.
Preliminary W77E468
- 54 -
Execution continues from the vectored address till an RETI instruction is executed. On execution of the
RETI instruction the processor pops the Stack and loads the PC with the contents at the top of the
stack. The user must take care that the status of the stack is restored to what is was after the hardware
LCALL, if the execution is to return to the interrupted program. The processor does not notice anything if
the stack contents are modified and will proceed with execution from the address put back into PC. Note
that a RET instruction would perform exactly the same process as a RETI instruction, but it would not
inform the Interrupt Controller that the interrupt service routine is completed, and would leave the
controller still thinking that the service routine is underway.
Interrupt Response Time
The response time for each interrupt source depends on several factors, such as the nature of the
interrupt and the instruction underway. In the case of external interrupts
INT0
to
INT5
, they are
sampled at C3 of every machine cycle and then their corresponding interrupt flags IEx will be set or
reset. The Timer 0 and 1 overflow flags are set at C3 of the machine cycle in which overflow has
occurred. These flag values are polled only in the next machine cycle. If a request is active and all three
conditions are met, then the hardware generated LCALL is executed. This LCALL itself takes four
machine cycles to be completed. Thus there is a minimum time of five machine cycles between the
interrupt flag being set and the interrupt service routine being executed.
A longer response time should be anticipated if any of the three conditions are not met. If a higher or
equal priority is being serviced, then the interrupt latency time obviously depends on the nature of the
service routine currently being executed. If the polling cycle is not the last machine cycle of the
instruction being executed, then an additional delay is introduced. The maximum response time (if no
other interrupt is in service) occurs if the W77E468 is performing a write to IE, IP, EIE or EIP and then
executes a MUL or DIV instruction. From the time an interrupt source is activated, the longest reaction
time is 12 machine cycles. This includes 1 machine cycle to detect the interrupt, 2 machine cycles to
complete the IE, IP, EIE or EIP access, 5 machine cycles to complete the MUL or DIV instruction and 4
machine cycles to complete the hardware LCALL to the interrupt vector location.
Thus in a single-interrupt system the interrupt response time will always be more than 5 machine cycles
and not more than 12 machine cycles. The maximum latency of 12 machine cycle is 48 clock cycles.
Note that in the standard 8051 the maximum latency is 8 machine cycles which equals 96 machine
cycles. This is a 50% reduction in terms of clock periods.
PROGRAMMABLE TIMERS/COUNTERS
The W77E468 has three 16-bit programmable timer/counters and one programmable Watchdog timer.
The Watchdog timer is operationally quite different from the other two timers.
TIMER/COUNTERS 0 & 1
The W77E468 has two 16-bit Timer/Counters. Each of these Timer/Counters has two 8 bit registers
which form the 16 bit counting register. For Timer/Counter 0 they are TH0, the upper 8 bits register, and
TL0, the lower 8 bit register. Similarly Timer/Counter 1 has two 8 bit registers, TH1 and TL1. The two can
be configured to operate either as timers, counting machine cycles or as counters counting external
inputs.
Preliminary W77E468
Publication Release Date: January 1999
- 55 - Revision A1
When configured as a "Timer", the timer counts clock cycles. The timer clock can be programmed to be
thought of as 1/12 of the system clock or 1/4 of the system clock. In the "Counter" mode, the register is
incremented on the falling edge of the external input pin, T0 in case of Timer 0, and T1 for Timer 1. The
T0 and T1 inputs are sampled in every machine cycle at C4. If the sampled value is high in one machine
cycle and low in the next, then a valid high to low transition on the pin is recognized and the count
register is incremented. Since it takes two machine cycles to recognize a negative transition on the pin,
the maximum rate at which counting will take place is 1/24 of the master clock frequency. In either the
"Timer" or "Counter" mode, the count register will be updated at C3. Therefore, in the "Timer" mode, the
recognized negative transition on pin T0 and T1 can cause the count register value to be updated only in
the machine cycle following the one in which the negative edge was detected.
The "Timer" or "Counter" function is selected by the "C/
T
" bit in the TMOD Special Function Register.
Each Timer/Counter has one selection bit for its own; bit 2 of TMOD selects the function for
Timer/Counter 0 and bit 6 of TMOD selects the function for Timer/Counter 1. In addition each
Timer/Counter can be set to operate in any one of four possible modes. The mode selection is done by
bits M0 and M1 in the TMOD SFR.
Time-Base Selection
The W77E468 gives the user two modes of operation for the timer. The timers can be programmed to
operate like the standard 8051 family, counting at the rate of 1/12 of the clock speed. This will ensure
that timing loops on the W77E468 and the standard 8051 can be matched. This is the default mode of
operation of the W77E468 timers. The user also has the option to count in the turbo mode, where the
timers will increment at the rate of 1/4 clock speed. This will straight-away increase the counting speed
three times. This selection is done by the T0M and T1M bits in CKCON SFR. A reset sets these bits to
0, and the timers then operate in the standard 8051 mode. The user should set these bits to 1 if the
timers are to operate in turbo mode.
MODE 0
In Mode 0, the timer/counters act as a 8 bit counter with a 5 bit, divide by 32 pre-scale. In this mode we
have a 13 bit timer/counter. The 13 bit counter consists of 8 bits of THx and 5 lower bits of TLx. The
upper 3 bits of TLx are ignored.
The negative edge of the clock increments the count in the TLx register. When the fifth bit in TLx moves
from 1 to 0, then the count in the THx register is incremented. When the count in THx moves from FFh
to 00h, then the overflow flag TFx in TCON SFR is set. The counted input is enabled only if TRx is set
and either GATE = 0 or
INTx
= 1. When C/
T
is set to 0, then it will count clock cycles, and if C/
T
is
set to 1, then it will count 1 to 0 transitions on T0 (P3.4) for timer 0 and T1 (P3.5) for timer 1. When the
13 bit count reaches 1FFFh the next count will cause it to roll-over to 0000h. The timer overflow flag TFx
of the relevant timer is set and if enabled an interrupts will occur. Note that when used as a timer, the
time-base may be either clock cycles/12 or clock cycles/4 as selected by the bits TxM of the CKCON
SFR.
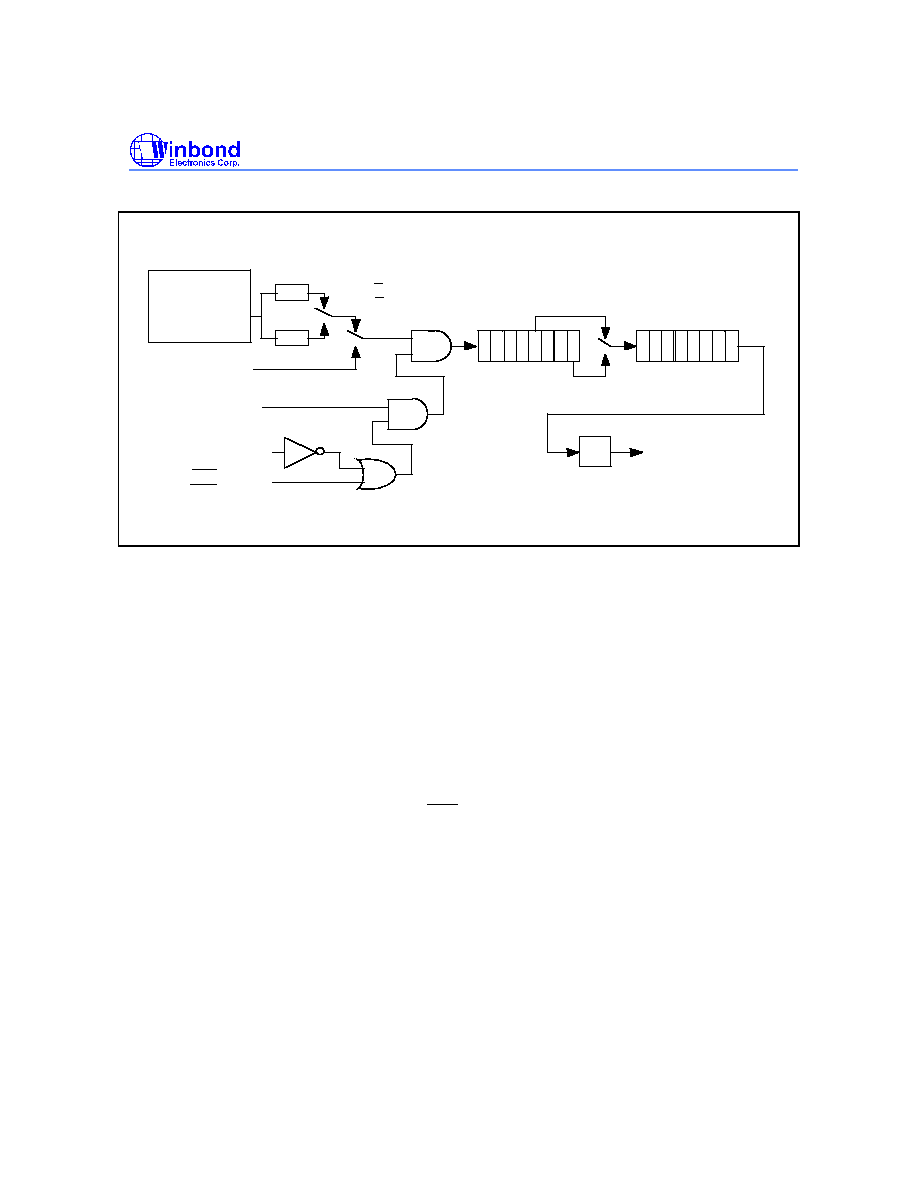
Preliminary W77E468
- 56 -
1/4
1/12
C/T = TMOD.2
(C/T = TMOD.6)
T0M = CKCON.3
(T1M = CKCON.4)
M1,M0 = TMOD.1,TMOD.0
(M1,M0 = TMOD.5,TMOD.4)
Interrupt
T0 = P3.4
(T1 = P3.5)
TH0
(TH1)
TL0
(TL1)
TF0
(TF1)
TR0 = TCON.4
(TR1 = TCON.6)
GATE = TMOD.3
(GATE = TMOD.7)
INT0 = P3.2
(INT1 = P3.3)
7
0
TFx
4
7
0
Timer 1 functions are shown in brackets
1
00
0
0
1
01
Clock Source
Mode input
div. by 4 osc/1
div. by 64 osc/16
div. by 1024 osc/256
Figure 11. Timer/Counter Mode 0 & Mode 1
MODE 1
Mode 1 is similar to Mode 0 except that the counting register forms a 16 bit counter, rather than a 13 bit
counter. This means that all the bits of THx and TLx are used. Roll-over occurs when the timer moves
from a count of FFFFh to 0000h. The timer overflow flag TFx of the relevant timer is set and if enabled an
interrupt will occur. The selection of the time-base in the timer mode is similar to that in Mode 0. The
gate function operates similarly to that in Mode 0.
MODE 2
In Mode 2, the timer/counter is in the Auto Reload Mode. In this mode, TLx acts as a 8 bit count
register, while THx holds the reload value. When the TLx register overflows from FFh to 00h, the TFx bit
in TCON is set and TLx is reloaded with the contents of THx, and the counting process continues from
here. The reload operation leaves the contents of the THx register unchanged. Counting is enabled by
the TRx bit and proper setting of GATE and
INTx
pins. As in the other two modes 0 and 1, mode 2
allows counting of either clock cycles (clock/12 or clock/4) or pulses on pin Tn.
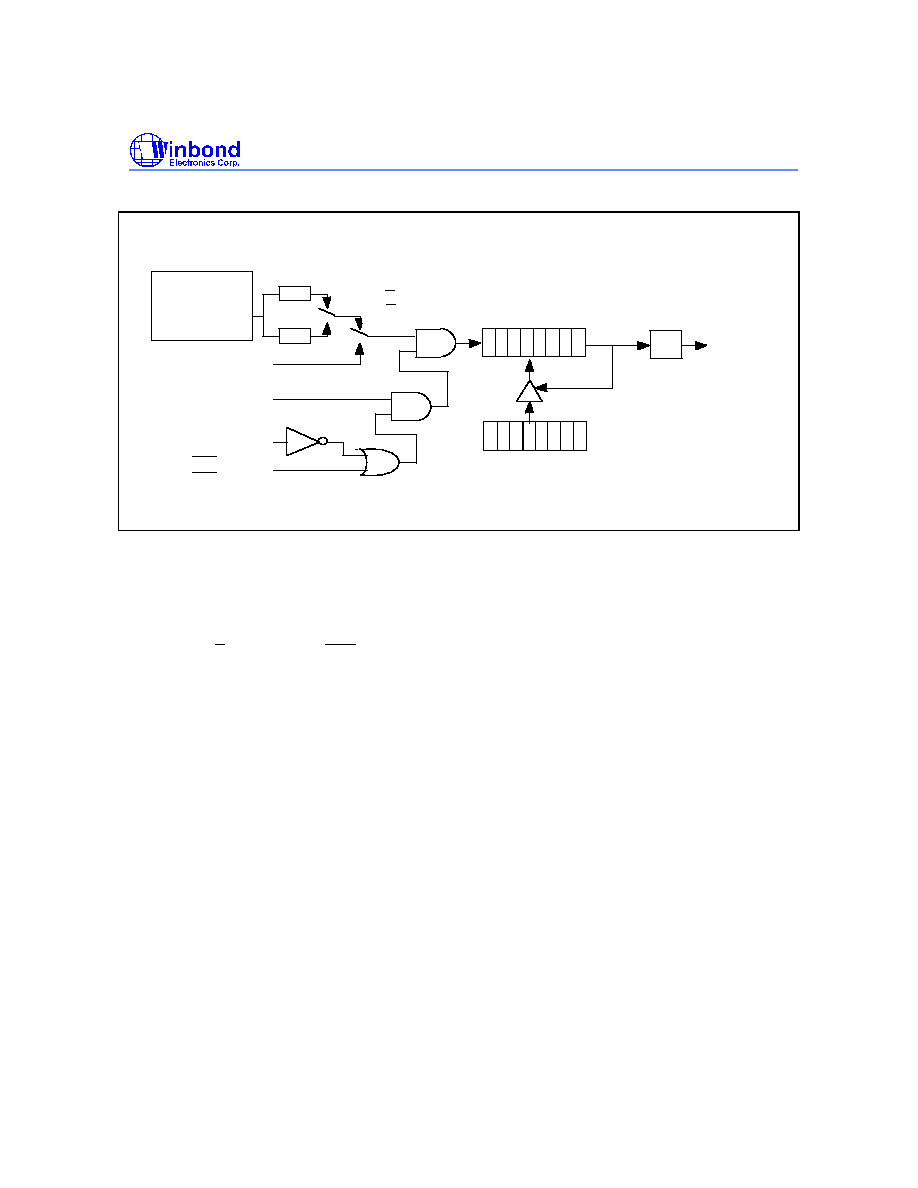
Preliminary W77E468
Publication Release Date: January 1999
- 57 - Revision A1
1/4
1/12
T0M = CKCON.3
(T1M = CKCON.4)
C/T = TMOD.2
(C/T = TMOD.6)
Interrupt
T0 = P3.4
(T1 = P3.5)
TH0
(TH1)
TL0
(TL1)
TF0
(TF1)
TR0 = TCON.4
(TR1 = TCON.6)
GATE = TMOD.3
(GATE = TMOD.7)
INT0 = P3.2
(INT1 = P3.3)
7
0
TFx
7
0
Timer 1 functions are shown in brackets
1
0
0
1
Clock Source
Mode input
div. by 4 osc/1
div. by 64 osc/16
div. by 1024 osc/256
Figure 12. Timer/Counter Mode 2
MODE 3
Mode 3 has different operating methods for the two timer/counters. For timer/counter 1, mode 3 simply
freezes the counter. Timer/Counter 0, however, configures TL0 and TH0 as two separate 8 bit count
registers in this mode. The logic for this mode is shown in the figure. TL0 uses the Timer/Counter 0
control bits C/
T
, GATE, TR0,
INT0
and TF0. The TL0 can be used to count clock cycles (clock/12 or
clock/4) or 1-to-0 transitions on pin T0 as determined by C/T (TMOD.2). TH0 is forced as a clock cycle
counter (clock/12 or clock/4) and takes over the use of TR1 and TF1 from Timer/Counter 1. Mode 3 is
used in cases where an extra 8 bit timer is needed. With Timer 0 in Mode 3, Timer 1 can still be used in
Modes 0, 1 and 2., but its flexibility is somewhat limited. While its basic functionality is maintained, it no
longer has control over its overflow flag TF1 and the enable bit TR1. Timer 1 can still be used as a
timer/counter and retains the use of GATE and INT1 pin. In this condition it can be turned on and off by
switching it out of and into its own Mode 3. It can also be used as a baud rate generator for the serial
port.
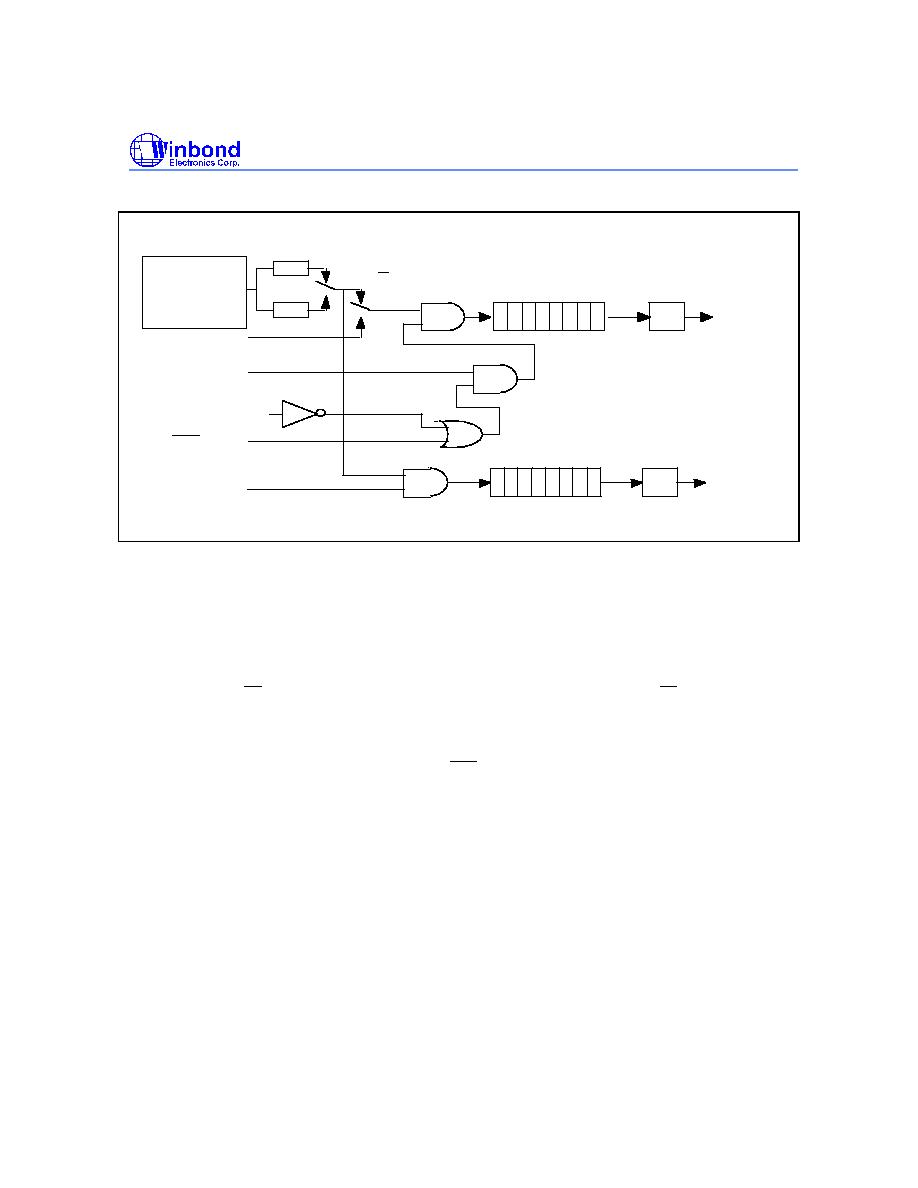
Preliminary W77E468
- 58 -
1/4
1/12
T0M = CKCON.3
Interrupt
C/T = TMOD.2
T0 = P3.4
TH0
TL0
TR0 = TCON.4
GATE = TMOD.3
TR1 = TCON.6
INT0 = P3.2
7
0
TF1
7
0
Interrupt
TF0
1
0
0
1
Clock Source
Mode input
div. by 4 osc/1
div. by 64 osc/16
div. by 1024 osc/256
Figure 13. Timer/Counter 0 Mode 3
TIMER/COUNTER 2
Timer/Counter 2 is a 16 bit up/down counter which is configured by the T2MOD register and controlled by
the T2CON register. Timer/Counter 2 is equipped with a capture/reload capability. As with the Timer 0
and Timer 1 counters, there exists considerable flexibility in selecting and controlling the clock, and in
defining the operating mode. The clock source for Timer/Counter 2 may be selected for either the
external T2 pin (C/
T2
= 1) or the crystal oscillator, which is divided by 12 or 4 (C/
T2
= 0). The clock is
then enabled when TR2 is a 1, and disabled when TR2 is a 0.
CAPTURE MODE
The capture mode is enabled by setting the CP/
RL2
bit in the T2CON register to a 1. In the capture
mode, Timer/Counter 2 serves as a 16 bit up counter. When the counter rolls over from FFFFh to 0000h,
the TF2 bit is set, which will generate an interrupt request. If the EXEN2 bit is set, then a negative
transition of T2EX pin will cause the value in the TL2 and TH2 register to be captured by the RCAP2L and
RCAP2H registers. This action also causes the EXF2 bit in T2CON to be set, which will also generate an
interrupt. Setting the T2CR bit (T2MOD.3), the W77E468 allows hardware to reset timer 2 automatically
after the value of TL2 and TH2 have been captured.
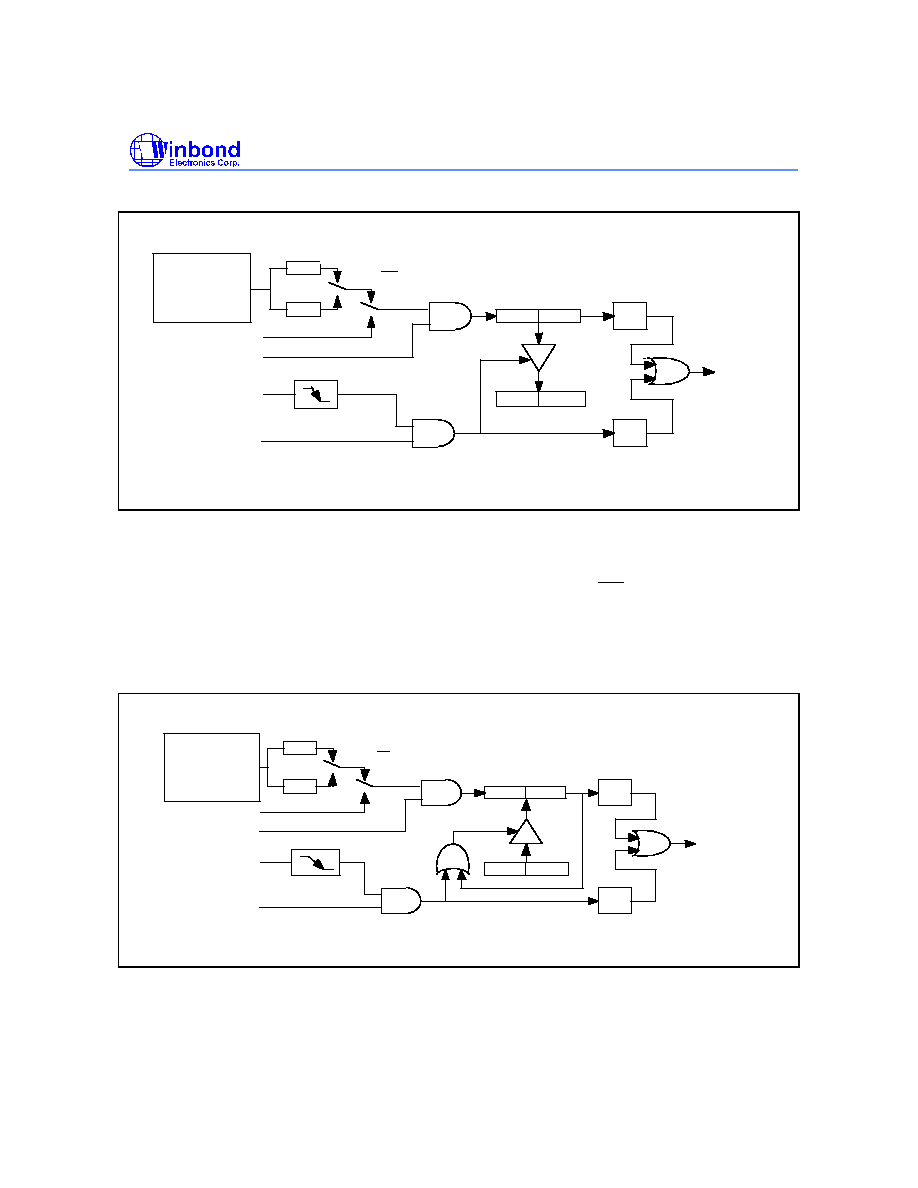
Preliminary W77E468
Publication Release Date: January 1999
- 59 - Revision A1
1/4
Clock Source
Mode input
div. by 4 osc/1
div. by 64 osc/16
div. by 1024 osc/256
1/12
T2M = CKCON.5
C/T2 = T2CON.1
T2CON.7
T2 = P1.0
T2CON.6
TR2 = T2CON.2
T2EX = P1.1
EXEN2 = T2CON.3
EXF2
Timer 2
Interrupt
TF2
TH2
TL2
RCAP2H
RCAP2L
1
0
0
1
Figure 14. 16-Bit Capture Mode
AUTO-RELOAD MODE, COUNTING UP
The auto-reload mode as an up counter is enabled by clearing the CP/
RL2
bit in the T2CON register
and clearing the DCEN bit in T2MOD register. In this mode, Timer/Counter 2 is a 16 bit up counter.
When the counter rolls over from FFFFh, a reload is generated that causes the contents of the RCAP2L
and RCAP2H registers to be reloaded into the TL2 and TH2 registers. The reload action also sets the
TF2 bit. If the EXEN2 bit is set, then a negative transition of T2EX pin will also cause a reload. This
action also sets the EXF2 bit in T2CON.
1/4
1/12
T2M = CKCON.5
C/T2 = T2CON.1
T2CON.7
T2 = P1.0
T2CON.6
TR2 =
T2CON.2
T2EX = P1.1
EXEN2 = T2CON.3
EXF2
Timer 2
Interrupt
TF2
TH2
TL2
RCAP2H
RCAP2L
1
0
0
1
Clock Source
Mode input
div. by 4 osc/1
div. by 64 osc/16
div. by 1024 osc/256
Figure 15. 16-Bit Auto-reload Mode, Counting Up
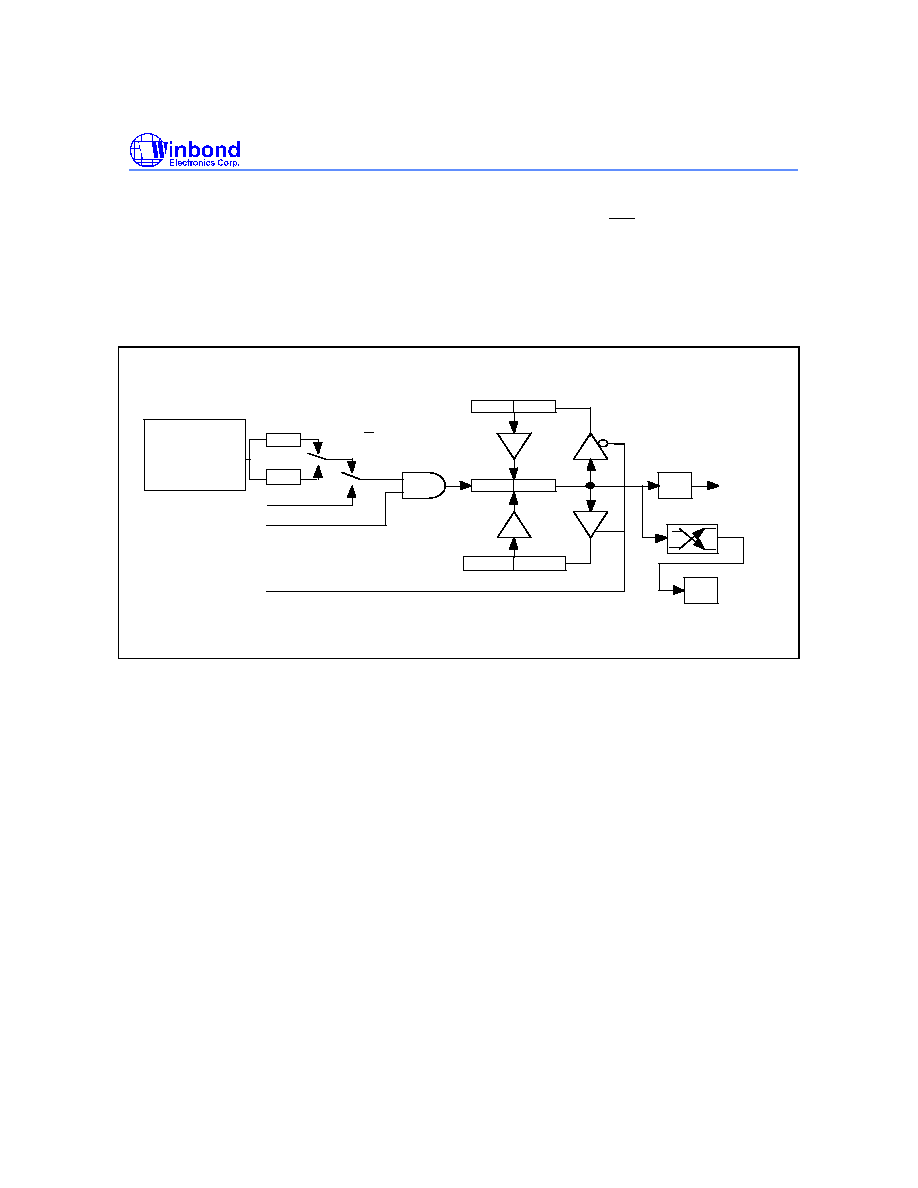
Preliminary W77E468
- 60 -
AUTO-RELOAD MODE, COUNTING UP/DOWN
Timer/Counter 2 will be in auto-reload mode as an up/down counter if CP/
RL2
bit in T2CON is cleared
and the DCEN bit in T2MOD is set. In this mode, Timer/Counter 2 is an up/down counter whose direction
is controlled by the T2EX pin. A 1 on this pin cause the counter to count up. An overflow while counting
up will cause the counter to be reloaded with the contents of the capture registers. The next down count
following the case where the contents of Timer/Counter equal the capture registers will load an FFFFh
into Timer/Counter 2. In either event a reload will set the TF2 bit. A reload will also toggle the EXF2 bit.
However, the EXF2 bit can not generate an interrupt while in this mode.
C/T = T2CON.1
1/4
1/12
T2M = CKCON.5
Down Counting Reload Value
T2CON
.7
Up Counting Reload Value
T2 = P1.0
T2CON.6
TR2 = T2CON.2
T2EX = P1.1
EXF2
Timer 2
Interrupt
TF2
TH2
TL2
RCAP2H
RCAP2L
1
0
0
1
0FFh
0FFh
DCEN = 1
Clock Source
Mode input
div. by 4 osc/1
div. by 64 osc/16
div. by 1024 osc/256
Figure 16. 16-Bit Auto-reload Up/Down Counter
BAUD RATE GENERATOR MODE
The baud rate generator mode is enabled by setting either the RCLK or TCLK bits in T2CON register.
While in the baud rate generator mode, Timer/Counter 2 is a 16 bit counter with auto reload when the
count rolls over from FFFFh. However, rolling over does not set the TF2 bit. If EXEN2 bit is set, then a
negative transition of the T2EX pin will set EXF2 bit in the T2CON register and cause an interrupt
request.
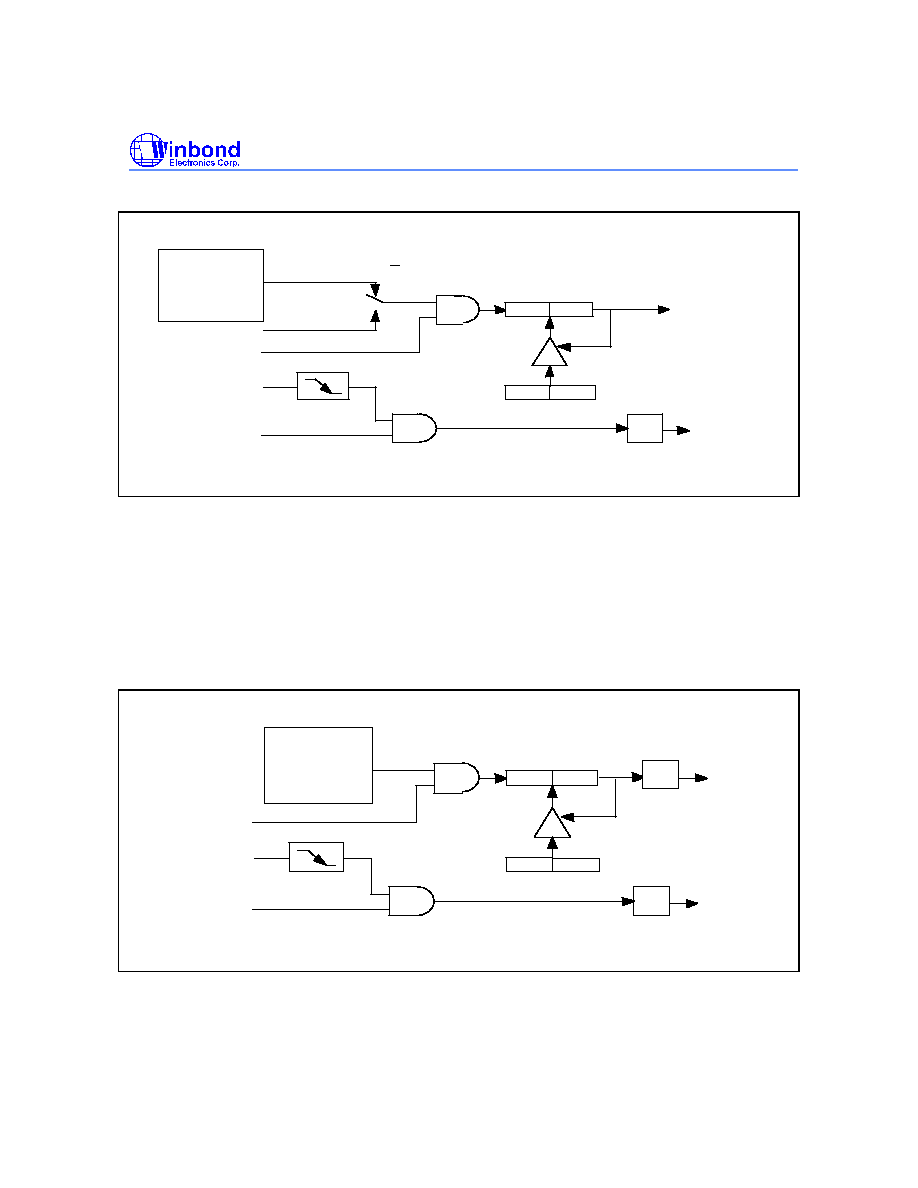
Preliminary W77E468
Publication Release Date: January 1999
- 61 - Revision A1
C/T = T2CON.1
T2 = P1.0
T2CON.6
TR2 = T2CON.2
T2EX = P1.1
EXEN2 = T2CON.3
EXF2
Timer 2
overflow
Timer 2
Interrupt
TH2
TL2
RCAP2H
RCAP2L
0
1
Clock Source
Mode input
div. by 4 osc/2
div. by 64 osc/32
div. by 1024 osc/512
Figure 17. Baud Rate Generator Mode
PROGRAMMABLE CLOCK-OUT
Timer 2 is equipped with a new clock-out feature which outputs a 50% duty cycle clock on P1.0. It can
be invoked as a programmable clock generator. To configure Timer 2 with clock-out mode, software must
initiate it by setting bit T2OE = 1, C/T2 = 0 and CP/RL = 0. Setting bit TR2 will start the timer. This
mode is similar to the baud rate generator mode, it will not generate an interrupt while Timer 2 overflow.
So it is possible to use Timer 2 as a baud rate generator and a clock generator at the same time. The
clock-out frequency is determined by the following equation:
The Clock-Out Frequency = Oscillator Frequency / [4 X (RCAP2H,RCAP2L) ]
T2CON.6
TR2 = T2CON.2
T2EX = P1.1
EXEN2 = T2CON.3
EXF2
T2=P1.0
Timer 2
Interrupt
TH2
TL2
RCAP2H
RCAP2L
Clock Source
Mode input
div. by 4 osc/2
div. by 64 osc/32
div. by 1024 osc/512
1/2
Figure 18. Programmable Clock-Out Mode
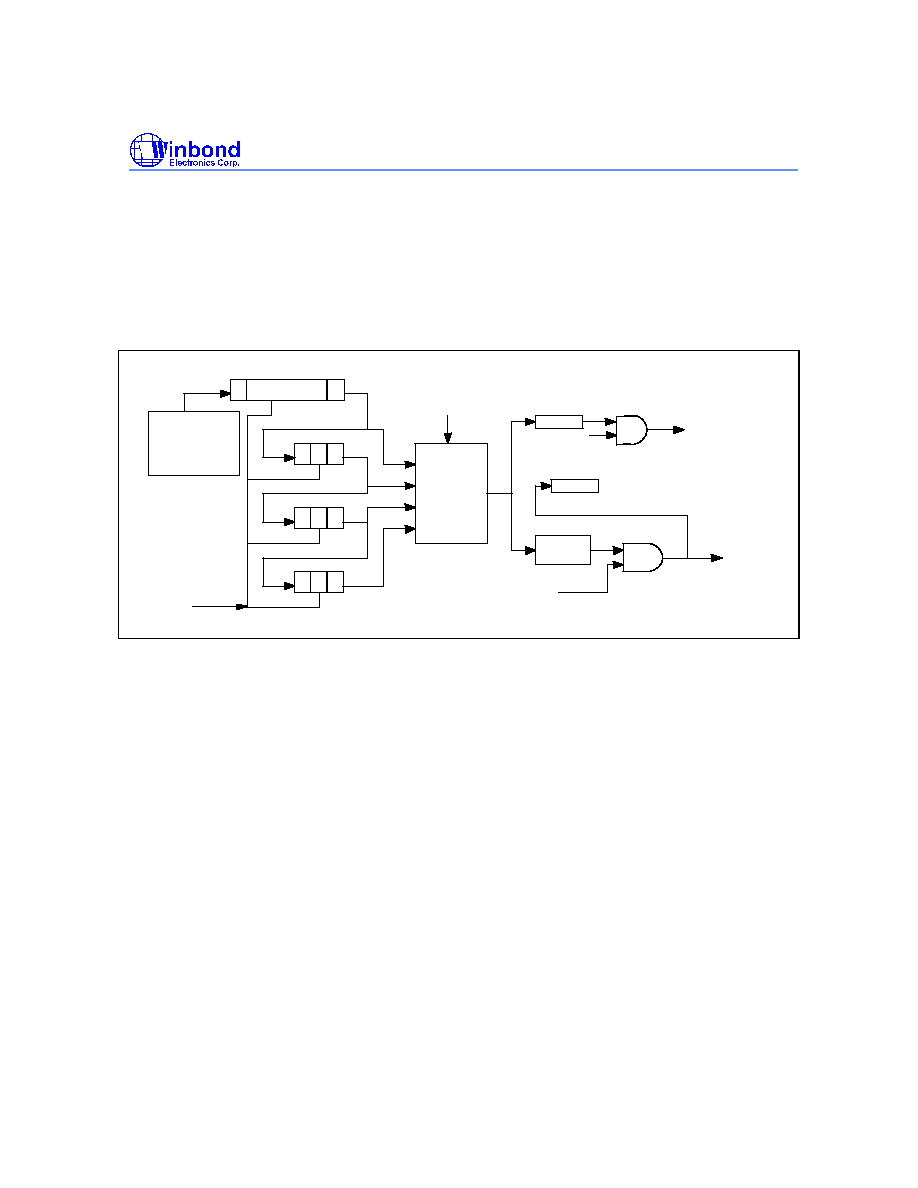
Preliminary W77E468
- 62 -
WATCHDOG TIMER
The Watchdog timer is a free-running timer which can be programmed by the user to serve as a system
monitor, a time-base generator or an event timer. It is basically a set of dividers that divide the system
clock. The divider output is selectable and determines the time-out interval. When the time-out occurs a
flag is set, which can cause an interrupt if enabled, and a system reset can also be caused if it is
enabled. The interrupt will occur if the individual interrupt enable and the global enable are set. The
interrupt and reset functions are independent of each other and may be used separately or together
depending on the users software.
16
WD1,WD0
00
01
10
11
Interrupt
Reset
Enable Watchdog timer reset
EWT(WDCON.1)
Reset Watchdog
RWT (WDCON.0)
0
17
19
20
22
23
25
Time-out
selector
WDIF
WTRF
512 clock
delay
EWDI(EIE.4)
Clock Source
Mode input
div. by 4 osc/1
div. by 64 osc/16
div. by 1024 osc/256
Figure 19. Watchdog Timer
The Watchdog timer should first be restarted by using RWT. This ensures that the timer starts from a
known state. The RWT bit is used to restart the watchdog timer. This bit is self clearing, i.e. after writing
a 1 to this bit the software will automatically clear it. The watchdog timer will now count clock cycles.
The time-out interval is selected by the two bits WD1 and WD0 (CKCON.7 and CKCON.6). When the
selected time-out occurs, the Watchdog interrupt flag WDIF (WDCON.3) is set. After the time-out has
occurred, the watchdog timer waits for an additional 512 clock cycles. The software must issue a RWT
to reset the watchdog before the 512 clocks have elapsed. If the Watchdog Reset EWT (WDCON.1) is
enabled, then 512 clocks after the time-out, if there is no RWT, a system reset due to Watchdog timer
will occur. This will last for two machine cycles, and the Watchdog timer reset flag WTRF (WDCON.2)
will be set. This indicates to the software that the watchdog was the cause of the reset.
When used as a simple timer, the reset and interrupt functions are disabled. The timer will set the WDIF
flag each time the timer completes the selected time interval. The WDIF flag is polled to detect a time-
out and the RWT allows software to restart the timer. The Watchdog timer can also be used as a very
long timer. The interrupt feature is enabled in this case. Every time the time-out occurs an interrupt will
occur if the global interrupt enable EA is set.
Preliminary W77E468
Publication Release Date: January 1999
- 63 - Revision A1
The main use of the Watchdog timer is as a system monitor. This is important in real-time control
applications. In case of some power glitches or electro-magnetic interference, the processor may begin
to execute errant code. If this is left unchecked the entire system may crash. Using the watchdog timer
interrupt during software development will allow the user to select ideal watchdog reset locations. The
code is first written without the watchdog interrupt or reset. Then the watchdog interrupt is enabled to
identify code locations where interrupt occurs. The user can now insert instructions to reset the
watchdog timer which will allow the code to run without any watchdog timer interrupts. Now the
watchdog timer reset is enabled and the watchdog interrupt may be disabled,. If any errant code is
executed now, then the reset watchdog timer instructions will not be executed at the required instants
and watchdog reset will occur.
The watchdog time-out selection will result in different time-out values depending on the clock speed.
The reset, when enabled, will occur 512 clocks after the time-out has occurred.
Table 9. Time-out values for the Watchdog timer
WD1
WD0
Watchdog
Interval
Number of
Clocks
Time
@1.8432 MHz
Time
@10 MHz
Time
@25 MHz
0
0
2
17
131072
71.11 mS
13.11 mS
5.24 mS
0
1
2
20
1048576
568.89 mS
104.86 mS
41.94 mS
1
0
2
23
8388608
4551.11 mS
838.86 mS
335.54 mS
1
1
2
26
67108864
36408.88 mS
6710.89 mS
2684.35 mS
The Watchdog timer will de disabled by a power-on/fail reset. The Watchdog timer reset does not disable
the watchdog timer, but will restart it. In general, software should restart the timer to put it into a known
state.
The control bits that support the Watchdog timer are discussed below.
WATCHDOG CONTROL
WDIF: WDCON.3 - Watchdog Timer Interrupt flag. This bit is set whenever the time-out occurs in the
watchdog timer. If the Watchdog interrupt is enabled (EIE.4), then an interrupt will occur (if the
global interrupt enable is set and other interrupt requirements are met). Software or any reset
can clear this bit.
WTRF: WDCON.2 - Watchdog Timer Reset flag. This bit is set whenever a watchdog reset occurs.
This bit is useful for determined the cause of a reset. Software must read it, and clear it
manually. A Power-fail reset will clear this bit. If EWT = 0, then this bit will not be affected by
the watchdog timer.
EWT: WDCON.1 - Enable Watchdog timer Reset. This bit when set to 1 will enable the Watchdog
timer reset function. Setting this bit to 0 will disable the Watchdog timer reset function, but will
leave the timer running
RWT: WDCON.0 - Reset Watchdog Timer. This bit is used to clear the Watchdog timer and to
restart it. This bit is self-clearing, so after the software writes 1 to it the hardware will
automatically clear it. If the Watchdog timer reset is enabled, then the RWT has to be set by
the user within 512 clocks of the time-out. If this is not done then a Watchdog timer reset will
occur.
Preliminary W77E468
- 64 -
CLOCK CONTROL
WD1,WD0: CKCON.7, CKCON.6 - Watchdog Timer Mode select bits. These two bits select the time-
out interval for the watchdog timer. The reset time is 512 clock longer than the interrupt
time-out value.
The default Watchdog time-out is 2
17
clocks, which is the shortest time-out period. The EWT, WDIF and
RWT bits are protected by the Timed Access procedure. This prevents software from accidentally
enabling or disabling the watchdog timer. More importantly, it makes it highly improbable that errant
code can enable or disable the watchdog timer.
SERIAL PORT
Serial port in the W77E468 is a full duplex port. The W77E468 provides the user with additional features
such as the Frame Error Detection and the Automatic Address Recognition. The serial ports are capable
of synchronous as well as asynchronous communication. In Synchronous mode the W77E468
generates the clock and operates in a half duplex mode. In the asynchronous mode, full duplex operation
is available. This means that it can simultaneously transmit and receive data. The transmit register and
the receive buffer are both addressed as SBUF Special Function Register. However any write to SBUF
will be to the transmit register, while a read from SBUF will be from the receive buffer register. The serial
port can operate in four different modes as described below.
MODE 0
This mode provides synchronous communication with external devices. In this mode serial data is
transmitted and received on the RXD line. TXD is used to transmit the shift clock. The TxD clock is
provided by the W77E468 whether the device is transmitting or receiving. This mode is therefore a half
duplex mode of serial communication. In this mode, 8 bits are transmitted or received per frame. The
LSB is transmitted/received first. The baud rate is fixed at 1/12 or 1/4 of the oscillator frequency. This
baud rate is determined by the SM2 bit (SCON.5). When this bit is set to 0, then the serial port runs at
1/12 of the clock. When set to 1, the serial port runs at 1/4 of the clock. This additional facility of
programmable baud rate in mode 0 is the only difference between the standard 8051 and the W77E468.
The functional block diagram is shown below. Data enters and leaves the Serial port on the RxD line. The
TxD line is used to output the shift clock. The shift clock is used to shift data into and out of the
W77E468 and the device at the other end of the line. Any instruction that causes a write to SBUF will
start the transmission. The shift clock will be activated and data will be shifted out on the RxD pin till all
8 bits are transmitted. If SM2 = 1, then the data on RxD will appear 1 clock period before the falling edge
of shift clock on TxD. The clock on TxD then remains low for 2 clock periods, and then goes high again.
If SM2 = 0, the data on RxD will appear 3 clock periods before the falling edge of shift clock on TxD. The
clock on TxD then remains low for 6 clock periods, and then goes high again. This ensures that at the
receiving end the data on RxD line can either be clocked on the rising edge of the shift clock on TxD or
latched when the TxD clock is low.
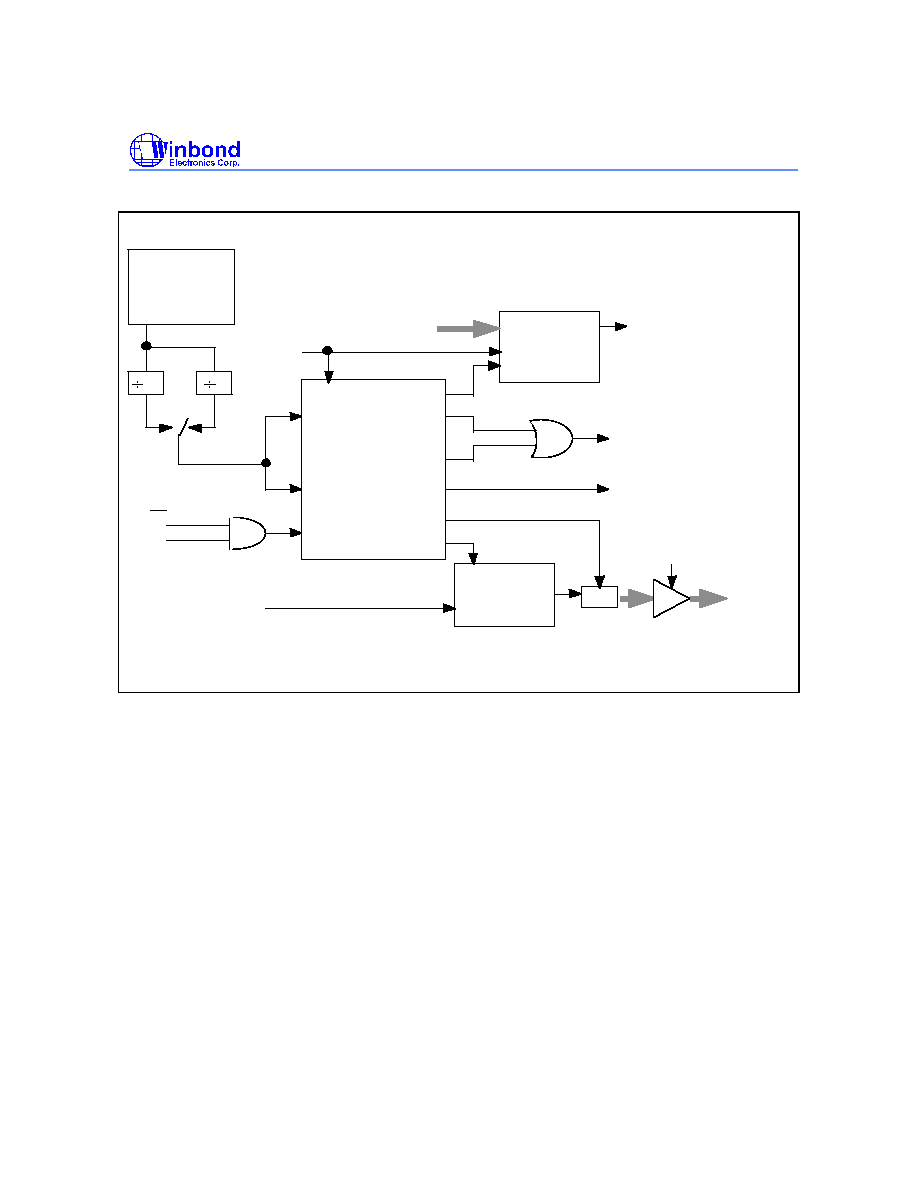
Preliminary W77E468
Publication Release Date: January 1999
- 65 - Revision A1
SBUF
Transmit Shift Register
Receive Shift Register
TX
SHIFT
PAROUT
Internal
Data Bus
Internal
Data Bus
RXD
P3.0 Alternate
Output Function
TXD
P3.1 Alternate
Output function
RXD
P3.0 Alternate
Iutput function
Serial Port Interrupt
Write to
SBUF
TX
START
SOUT
TI
RI
REN
PARIN
LOAD
CLOCK
Read SBUF
TX CLOCK
RI
SERIAL
CONTROLLE
SHIFT
CLOCK
RX
CLOCK
LOAD SBUF
RX
START
RX SHIFT
CLOCK
SIN
4
12
1
0
SM2
Clock Source
Mode input
div. by 4 osc/1
div. by 64 osc/16
div. by 1024 osc/256
Figure 20. Serial Port Mode 0
The TI flag is set high in C1 following the end of transmission of the last bit. The serial port will receive
data when REN is 1 and RI is zero. The shift clock (TxD) will be activated and the serial port will latch
data on the rising edge of shift clock. The external device should therefore present data on the falling
edge on the shift clock. This process continues till all the 8 bits have been received. The RI flag is set in
C1 following the last rising edge of the shift clock on TxD. This will stop reception, till the RI is cleared by
software.
MODE 1
In Mode 1, the full duplex asynchronous mode is used. Serial communication frames are made up of 10
bits transmitted on TXD and received on RXD. The 10 bits consist of a start bit (0), 8 data bits (LSB first),
and a stop bit (1). On receive, the stop bit goes into RB8 in the SFR SCON. The baud rate in this mode
is variable. The serial baud can be programmed to be 1/16 or 1/32 of the Timer 1 overflow. Since the
Timer 1 can be set to different reload values, a wide variation in baud rates is possible.
Preliminary W77E468
- 66 -
Transmission begins with a write to SBUF. The serial data is brought out on to TxD pin at C1 following
the first roll-over of divide by 16 counter. The next bit is placed on TxD pin at C1 following the next
rollover of the divide by 16 counter. Thus the transmission is synchronized to the divide by 16 counter
and not directly to the write to SBUF signal. After all 8 bits of data are transmitted, the stop bit is
transmitted. The TI flag is set in the C1 state after the stop bit has been put out on TxD pin. This will be
at the 10th rollover of the divide by 16 counter after a write to SBUF.
Reception is enabled only if REN is high. The serial port actually starts the receiving of serial data, with
the detection of a falling edge on the RxD pin. The 1-to-0 detector continuously monitors the RxD line,
sampling it at the rate of 16 times the selected baud rate. When a falling edge is detected, the divide by
16 counter is immediately reset. This helps to align the bit boundaries with the rollovers of the divide by
16 counter.
The 16 states of the counter effectively divide the bit time into 16 slices. The bit detection is done on a
best of three basis. The bit detector samples the RxD pin, at the 8th, 9th and 10th counter states. By
using a majority 2 of 3 voting system, the bit value is selected. This is done to improve the noise
rejection feature of the serial port. If the first bit detected after the falling edge of RxD pin is not 0, then
this indicates an invalid start bit, and the reception is immediately aborted. The serial port again looks for
a falling edge in the RxD line. If a valid start bit is detected, then the rest of the bits are also detected
and shifted into the SBUF.
After shifting in 8 data bits, there is one more shift to do, after which the SBUF and RB8 are loaded and
RI is set. However certain conditions must be met before the loading and setting of RI can be done.
1. RI must be 0 and
2. Either SM2 = 0, or the received stop bit = 1.
If these conditions are met, then the stop bit goes to RB8, the 8 data bits go into SBUF and RI is set.
Otherwise the received frame may be lost. After the middle of the stop bit, the receiver goes back to
looking for a 1-to-0 transition on the RxD pin.
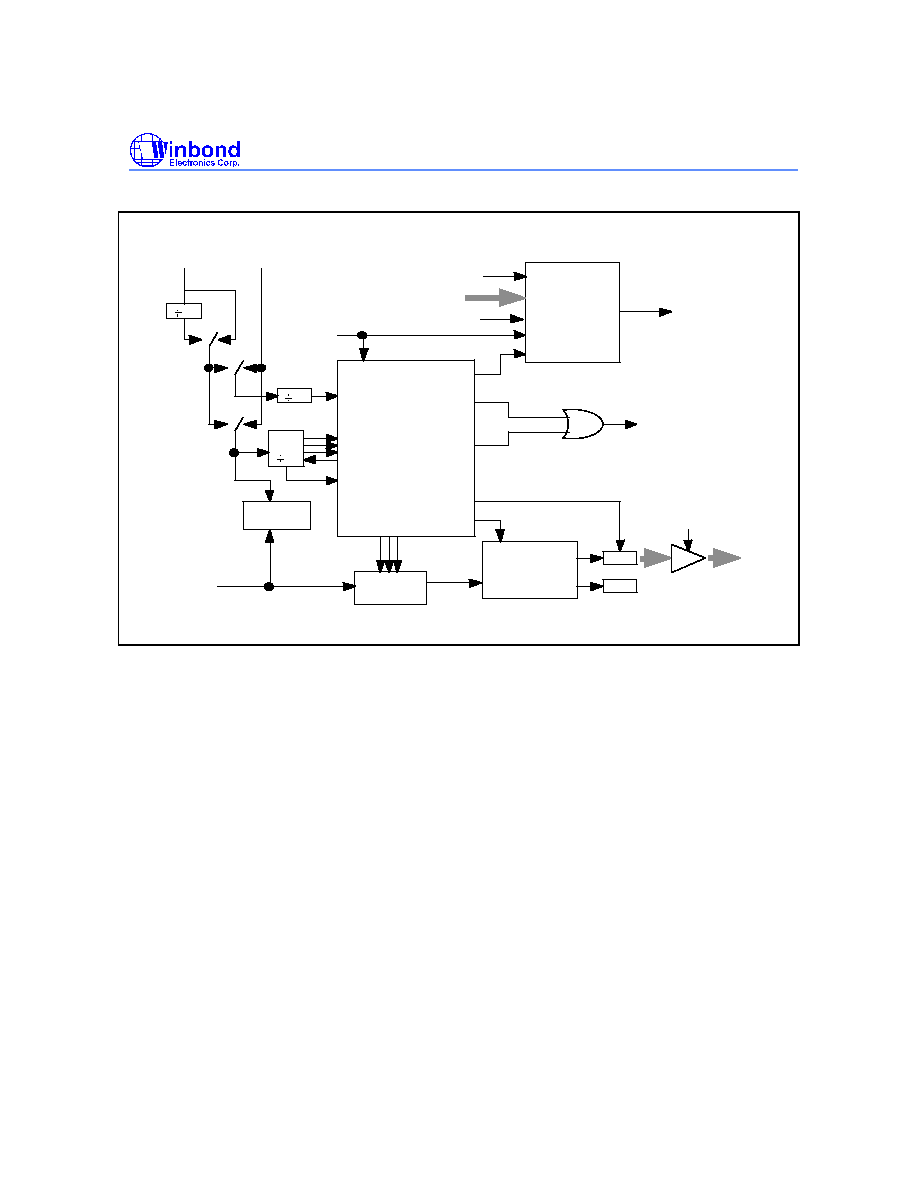
Preliminary W77E468
Publication Release Date: January 1999
- 67 - Revision A1
SBUF
RB8
Transmit Shift Register
Receive Shift
Register
TX SHIFT
PAROUT
D8
Internal
Data Bus
Internal
Data
Bus
TXD
RXD
Serial Port
Interrupt
SMOD=
(SMOD_1)
TCLK
RCLK
SAMPLE
Write to
SBUF
TX START
SOUT
0
1
0
1
TI
1
0
PARIN
STOP
START
LOAD
CLOCK
Read
SBUF
Timer 2 Overflow
(for Serial Port 0 only)
Timer 1
Overflow
TX CLOCK
RI
SERIAL
CONTROLLER
RX CLOCK
LOAD
SBUF
RX
START
RX SHIFT
2
16
1-TO-0
DETECTOR
BIT
DETECTOR
16
CLOCK
SIN
Figure 21. Serial Port Mode 1
MODE 2
This mode uses a total of 11 bits in asynchronous full-duplex communication. The functional description
is shown in the figure below. The frame consists of one start bit (0), 8 data bits (LSB first), a
programmable 9th bit (TB8) and a stop bit (0). The 9th bit received is put into RB8. The baud rate is
programmable to 1/32 or 1/64 of the oscillator frequency, which is determined by the SMOD bit in PCON
SFR. Transmission begins with a write to SBUF. The serial data is brought out on to TxD pin at C1
following the first roll-over of the divide by 16 counter. The next bit is placed on TxD pin at C1 following
the next rollover of the divide by 16 counter. Thus the transmission is synchronized to the divide by 16
counter, and not directly to the write to SBUF signal. After all 9 bits of data are transmitted, the stop bit
is transmitted. The TI flag is set in the C1 state after the stop bit has been put out on TxD pin. This will
be at the 11th rollover of the divide by 16 counter after a write to SBUF. Reception is enabled only if REN
is high. The serial port actually starts the receiving of serial data, with the detection of a falling edge on
the RxD pin. The 1-to-0 detector continuously monitors the RxD line, sampling it at the rate of 16 times
the selected baud rate. When a falling edge is detected, the divide by 16 counter is immediately reset.
This helps to align the bit boundaries with the rollovers of the divide by 16 counter. The 16 states of the
counter effectively divide the bit time into 16 slices. The bit detection is done on a best of three basis.
The bit detector samples the RxD pin, at the 8th, 9th and 10th counter states. By using a majority 2 of 3
voting system, the bit value is selected. This is done to improve the noise rejection feature of the serial
port. If the first bit detected after the falling edge of RxD pin, is not 0, then this indicates an invalid start
bit, and the reception is immediately aborted. The serial port again looks for a falling edge in the RxD
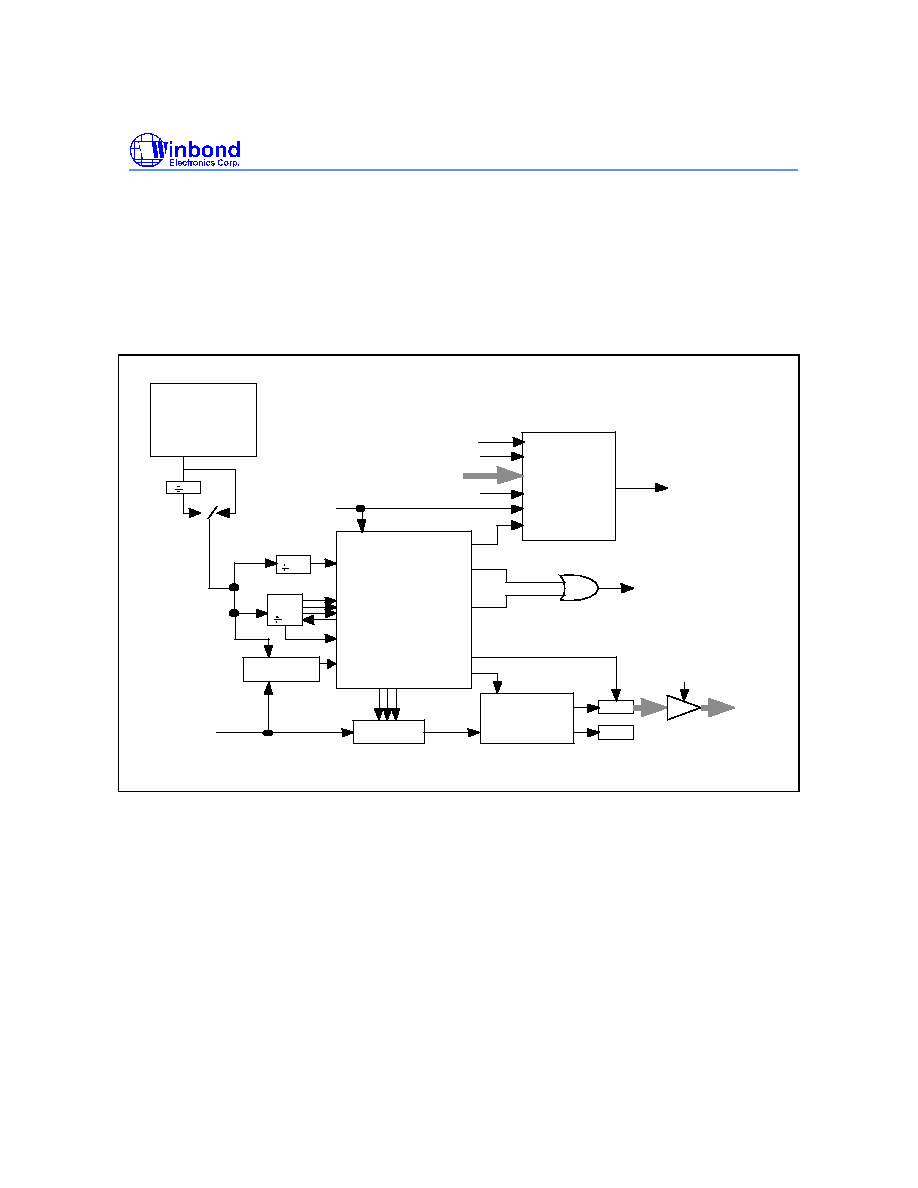
Preliminary W77E468
- 68 -
line. If a valid start bit is detected, then the rest of the bits are also detected and shifted into the SBUF.
After shifting in 9 data bits, there is one more shift to do, after which the SBUF and RB8 are loaded and
RI is set. However certain conditions must be met before the loading and setting of RI can be done.
1. RI must be 0 and
2. Either SM2 = 0, or the received stop bit = 1.
If these conditions are met, then the stop bit goes to RB8, the 8 data bits go into SBUF and RI is set.
Otherwise the received frame may be lost. After the middle of the stop bit, the receiver goes back to
looking for a 1-to-0 transition on the RxD pin.
SBUF
RB8
Transmit Shift Register
Receive Shift Register
TX
SHIFT
PAROUT
D8
Internal
Data Bus
Internal
Data
Bus
TXD
RXD
Serial Port
Interrupt
SMOD=
(SMOD_1)
SAMPLE
Write to
SBUF
TX
START
SOUT
0
1
TI
PARIN
STOP
START
LOAD
CLOCK
Read
SBUF
TX
CLOCK
RI
SERIAL
CONTROLLER
RX CLOCK
LOAD
SBUF
RX START
RX SHIFT
2
16
1-TO-0
DETECTOR
BIT
DETECTOR
16
CLOCK
SIN
D8
TB8
Clock Source
Mode input
div. by 4 osc/2
div. by 64 osc/32
div. by 1024 osc/512
Figure 22. Serial Port Mode 2
MODE 3
This mode is similar to Mode 2 in all respects, except that the baud rate is programmable. The user
must first initialize the Serial related SFR SCON before any communication can take place. This involves
selection of the Mode and baud rate. The Timer 1 should also be initialized if modes 1 and 3 are used. In
all four modes, transmission is started by any instruction that uses SBUF as a destination register.
Reception is initiated in Mode 0 by the condition RI = 0 and REN = 1. This will generate a clock on the
TxD pin and shift in 8 bits on the RxD pin. Reception is initiated in the other modes by the incoming start
bit if REN = 1. The external device will start the communication by transmitting the start bit.
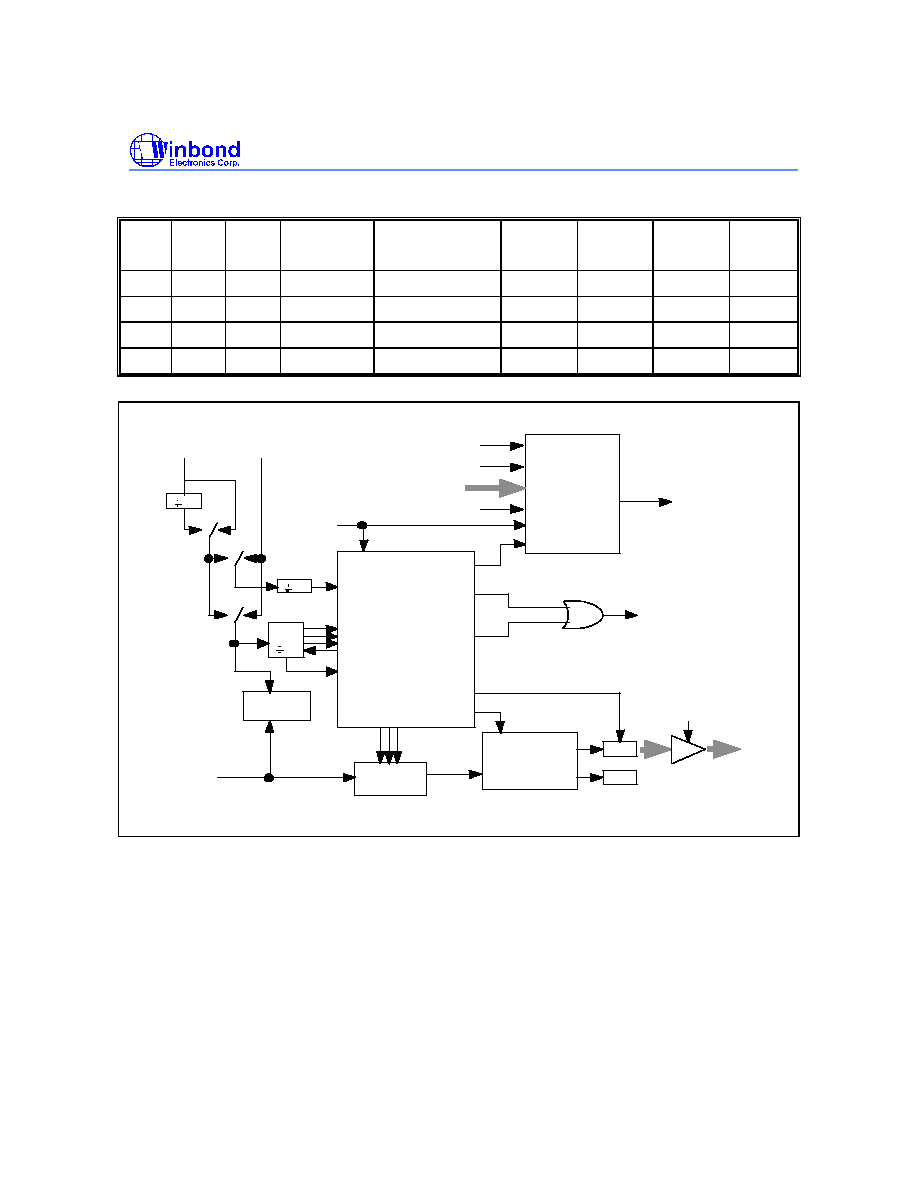
Preliminary W77E468
Publication Release Date: January 1999
- 69 - Revision A1
Table 10. Serial Ports Modes
SM1
SM0
Mode Type
Baud Clock
Frame
size
Start
bit
Stop
bit
9th bit
function
0
0
0
Synch.
4 or 12 T
CLKS
8 bits
No
No
None
0
1
1
Asynch.
Timer 1 or 2
10 bits
1
1
None
1
0
2
Asynch.
32 or 64 T
CLKS
11 bits
1
1
0, 1
1
1
3
Asynch.
Timer 1 or 2
11 bits
1
1
0, 1
SBUF
RB8
Transmit Shift Register
Receive Shift
Register
TX SHIFT
PAROUT
D8
Internal
Data Bus
Internal
Data
Bus
TXD
RXD
Serial Port
Interrupt
SMOD=
(SMOD_1)
TCLK
RCLK
SAMPLE
Write to
SBUF
TX START
SOUT
0
1
0
1
TI
1
0
PARIN
STOP
START
LOAD
CLOCK
Read
SBUF
Timer 2 Overflow
(for Serial Port 0 only)
Timer 1
Overflow
TX CLOCK
RI
SERIAL
CONTROLLER
RX CLOCK
LOAD
SBUF
RX
START
RX SHIFT
2
16
1-TO-0
DETECTOR
BIT
DETECTOR
16
CLOCK
SIN
D8
TB8
Figure 23. Serial Port Mode 3
Framing Error Detection
A Frame Error occurs when a valid stop bit is not detected. This could indicate incorrect serial data
communication. Typically the frame error is due to noise and contention on the serial communication
line. The W77E468 has the facility to detect such framing errors and set a flag which can be checked by
software.
Preliminary W77E468
- 70 -
The Frame Error FE(FE_1) bit is located in SCON.7(SCON1.7). This bit is normally used as SM0 in the
standard 8051 family. However, in the W77E468 it serves a dual function and is called SM0/FE
(SM0_1/FE_1). There are actually two separate flags, one for SM0 and the other for FE. The flag that is
actually accessed as SCON.7(SCON1.7) is determined by SMOD0 (PCON.6) bit. When SMOD0 is set
to 1, then the FE flag is indicated in SM0/FE. When SMOD0 is set to 0, then the SM0 flag is indicated
in SM0/FE.
The FE bit is set to 1 by hardware but must be cleared by software. Note that SMOD0 must be 1 while
reading or writing to FE or FE_1. If FE is set, then any following frames received without any error will not
clear the FE flag. The clearing has to be done by software.
Multiprocessor Communications
Multiprocessor communications makes use of the 9th data bit in modes 2 and 3. In the W77E468, the RI
flag is set only if the received byte corresponds to the Given or Broadcast address. This hardware feature
eliminates the software overhead required in checking every received address, and greatly simplifies the
software programmer task.
In the multiprocessor communication mode, the address bytes are distinguished from the data bytes by
transmitting the address with the 9th bit set high. When the master processor wants to transmit a block
of data to one of the slaves, it first sends out the address of the targeted slave (or slaves). All the slave
processors should have their SM2 bit set high when waiting for an address byte. This ensures that they
will be interrupted only by the reception of a address byte. The Automatic address recognition feature
ensures that only the addressed slave will be interrupted. The address comparison is done in hardware
not software.
The addressed slave clears the SM2 bit, thereby clearing the way to receive data bytes. With SM2 = 0,
the slave will be interrupted on the reception of every single complete frame of data. The unaddressed
slaves will be unaffected, as they will be still waiting for their address. In Mode 1, the 9th bit is the stop
bit, which is 1 in case of a valid frame. If SM2 is 1, then RI is set only if a valid frame is received and the
received byte matches the Given or Broadcast address.
The Master processor can selectively communicate with groups of slaves by using the Given Address.
All the slaves can be addressed together using the Broadcast Address. The addresses for each slave
are defined by the SADDR and SADEN SFRs. The slave address is an 8-bit value specified in the
SADDR SFR. The SADEN SFR is actually a mask for the byte value in SADDR. If a bit position in
SADEN is 0, then the corresponding bit position in SADDR is don't care. Only those bit positions in
SADDR whose corresponding bits in SADEN are 1 are used to obtain the Given Address. This gives the
user flexibility to address multiple slaves without changing the slave address in SADDR.
The following example shows how the user can define the Given Address to address different slaves.
Slave 1:
SADDR 1010 0100
SADEN 1111 1010
Given 1010 0x0x
Slave 2:
SADDR 1010 0111
SADEN 1111 1001
Given 1010 0xx1
Preliminary W77E468
Publication Release Date: January 1999
- 71 - Revision A1
The Given address for slave 1 and 2 differ in the LSB. For slave 1, it is a don't care, while for slave 2 it is
1. Thus to communicate only with slave 1, the master must send an address with LSB = 0 (1010 0000).
Similarly the bit 1 position is 0 for slave 1 and don't care for slave 2. Hence to communicate only with
slave 2 the master has to transmit an address with bit 1 = 1 (1010 0011). If the master wishes to
communicate with both slaves simultaneously, then the address must have bit 0 = 1 and bit 1 = 0. The
bit 3 position is don't care for both the slaves. This allows two different addresses to select both slaves
(1010 0001 and 1010 0101).
The master can communicate with all the slaves simultaneously with the Broadcast Address. This
address is formed from the logical ORing of the SADDR and SADEN SFRs. The zeros in the result are
defined as don't cares In most cases the Broadcast Address is FFh. In the previous case, the Broadcast
Address is (1111111X) for slave 1 and (11111111) for slave 2.
The SADDR and SADEN SFRs are located at address A9h and B9h respectively. On reset, these two
SFRs are initialized to 00h. This results in Given Address and Broadcast Address being set as XXXX
XXXX(i.e. all bits don't care). This effectively removes the multiprocessor communications feature, since
any selectivity is disabled.
TIMED ACCESS PROTECTION
The W77E468 has several new features, like the Watchdog timer, on-chip ROM size adjustment, wait
state control signal and Power on/fail reset flag, which are crucial to proper operation of the system. If
left unprotected, errant code may write to the Watchdog control bits resulting in incorrect operation and
loss of control. In order to prevent this, the W77E468 has a protection scheme which controls the write
access to critical bits. This protection scheme is done using a timed access.
In this method, the bits which are to be protected have a timed write enable window. A write is
successful only if this window is active, otherwise the write will be discarded. This write enable window is
open for 3 machine cycles if certain conditions are met. After 3 machine cycles, this window
automatically closes. The window is opened by writing AAh and immediately 55h to the Timed
Access(TA) SFR. This SFR is located at address C7h. The suggested code for opening the timed
access window is
TA
REG
0C7h
;define new register TA, located at 0C7h
MOV TA, #0AAh
MOV TA, #055h
When the software writes AAh to the TA SFR, a counter is started. This counter waits for 3 machine
cycles looking for a write of 55h to TA. If the second write (55h) occurs within 3 machine cycles of the
first write (AAh), then the timed access window is opened. It remains open for 3 machine cycles, during
which the user may write to the protected bits. Once the window closes the procedure must be repeated
to access the other protected bits.
Preliminary W77E468
- 72 -
Examples of Timed Assessing are shown below.
Example 1: Valid access
MOV TA, #0AAh
3 M/C
Note: M/C = Machine Cycles
MOV TA, #055h
3 M/C
MOV WDCON, #00h 3 M/C
Example 2: Valid access
MOV TA, #0AAh
3 M/C
MOV TA, #055h
3 M/C
NOP
1 M/C
SETB EWT
2 M/C
Example 3: Invalid access
MOV TA, #0AAh
3 M/C
MOV TA, #055h
3 M/C
NOP
1 M/C
NOP
1 M/C
CLR
POR
2 M/C
Example 4: Invalid Access
MOV TA, #0AAh
3 M/C
NOP
1 M/C
MOV TA, #055h
3 M/C
SETB EWT
2 M/C
In the first two examples, the writing to the protected bits is done before the 3 machine cycle window
closes. In Example 3, however, the writing to the protected bit occurs after the window has closed, and
so there is effectively no change in the status of the protected bit. In Example 4, the second write to TA
occurs 4 machine cycles after the first write, therefore the timed access window in not opened at all, and
the write to the protected bit fails.
ON-CHIP FLASH ROM CHARACTERISTICS
The W77E468 has several modes to program the on-chip FLASH ROM. All these operations are
configured by the pins RST, ALE,
PSEN
, A9CTRL(P3.0), A13CTRL(P3.1), A14CTRL(P3.2),
OECTRL(P3.3),
CE
(P3.6),
OE
(P3.7), A0(P1.0) and VPP(
EA
). Moreover, the A15
-
A0(P2.7
-
P2.0,
P1.7
-
P1.0) and the D7
-
D0(P0.7
-
P0.0) serve as the address and data bus respectively for these
operations.
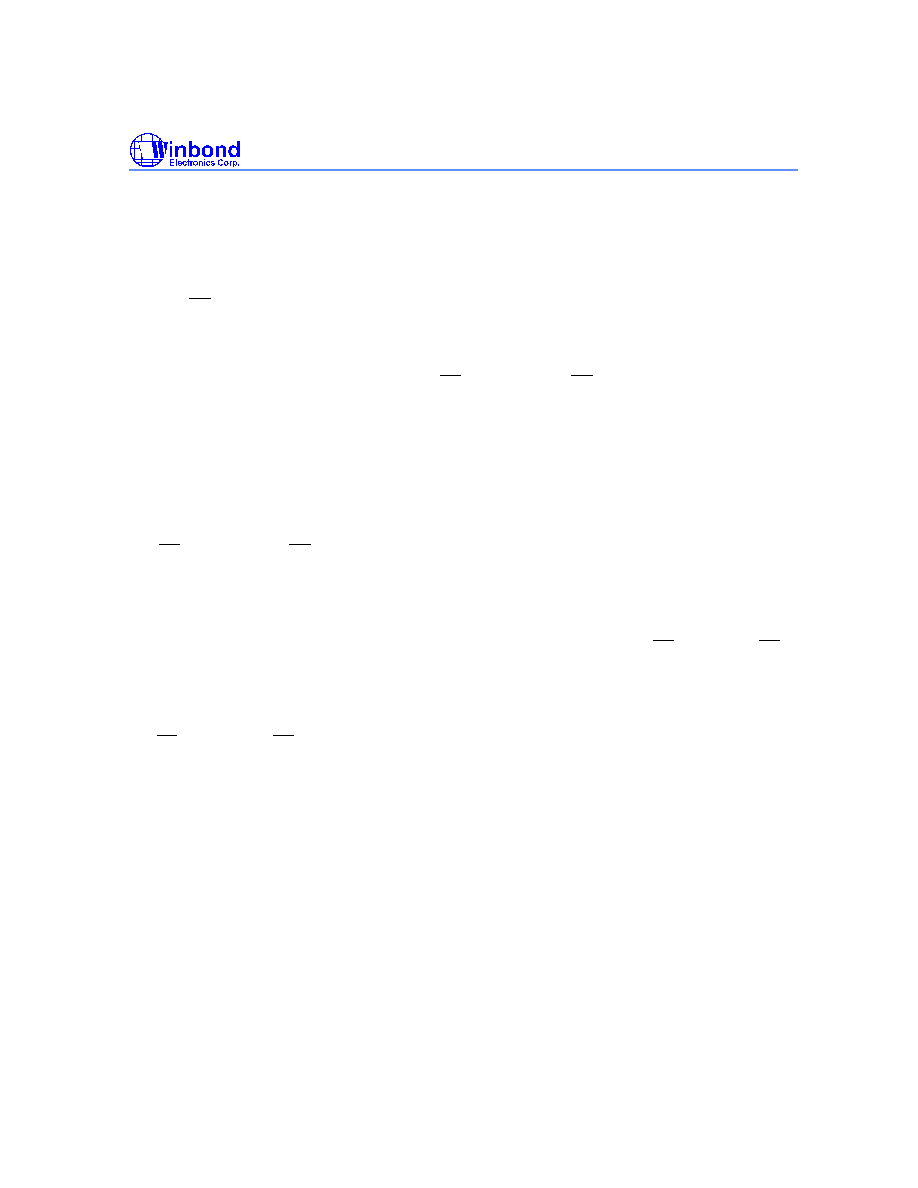
Preliminary W77E468
Publication Release Date: January 1999
- 73 - Revision A1
READ OPERATION
This operation is supported for customer to read their code and the Security bits. The data will not be
valid if the Lock bit is programmed to low.
OUTPUT DISABLE CONDITION
When the
OE
is set to high, no data output appears on the D7..D0.
PROGRAM OPERATION
This operation is used to program the data to FLASH ROM and the security bits. Program operation is
done when the V
PP
is reach to V
CP
(12.5V) level,
CE
set to low, and
OE
set to high.
PROGRAM VERIFY OPERATION
All the programming data must be checked after program operations. This operation should be performed
after each byte is programmed; it will ensure a substantial program margin.
ERASE OPERATION
An erase operation is the only way to change data from 0 to 1. This operation will erase all the FLASH
ROM cells and the security bits from 0 to 1. This erase operation is done when the V
PP
is reach to V
EP
level,
CE
set to low, and
OE
set to high.
ERASE VERIFY OPERATION
After an erase operation, all of the bytes in the chip must be verified to check whether they have been
successfully erased to 1 or not. The erase verify operation automatically ensures a substantial erase
margin. This operation will be done after the erase operation if V
PP
= V
EP
(14.5V),
CE
is high and
OE
is
low.
PROGRAM/ERASE INHIBIT OPERATION
This operation allows parallel erasing or programming of multiple chips with different data. When
P3.6(
CE
) = V
IH
, P3.7(
OE
) = V
IH
, erasing or programming of non-targeted chips is inhibited. So, except
for the P3.6 and P3.7 pins, the individual chips may have common inputs.
COMPANY/DEVICE ID READ OPERATION
This operation is supported for FLASH ROM programmer to get the company ID or device ID on the
W77E468.
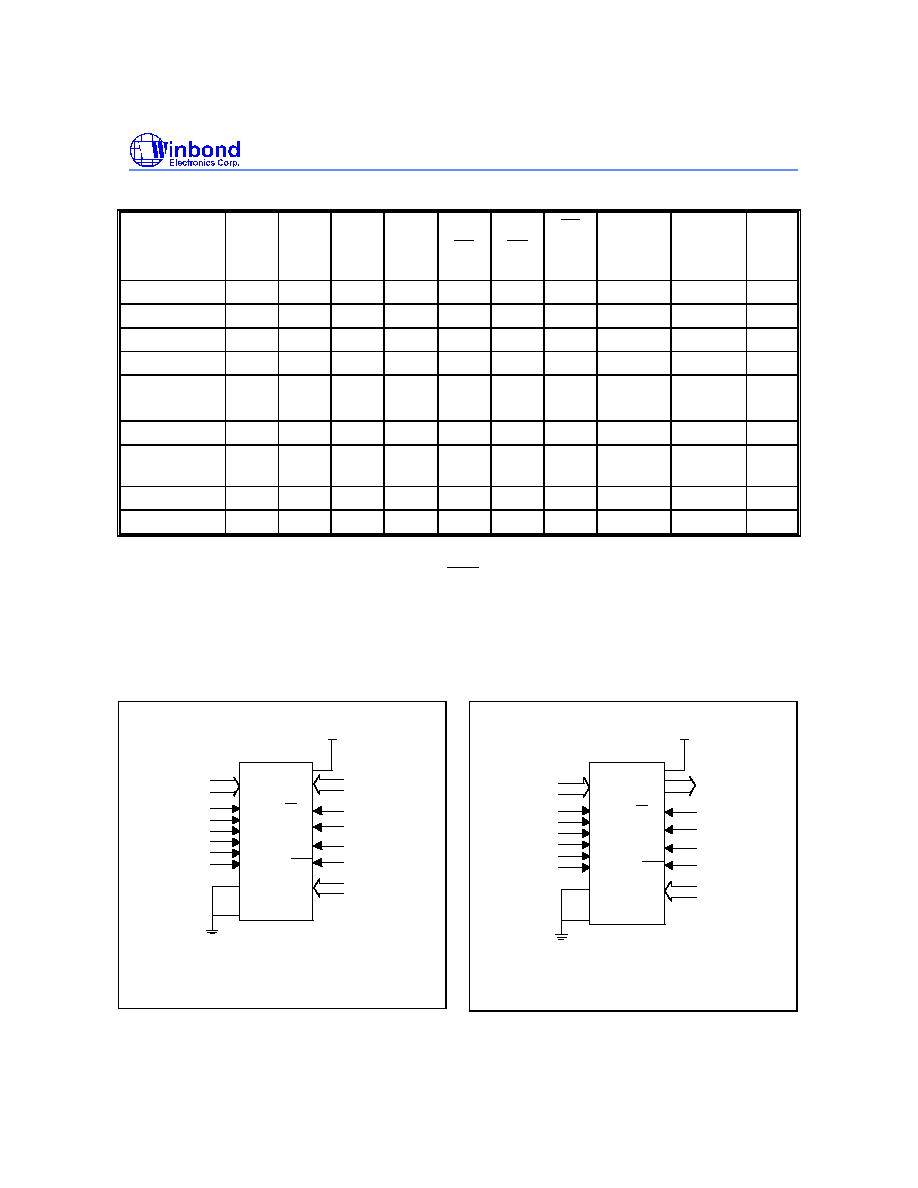
Preliminary W77E468
- 74 -
Operations
P3.0
(A9
CTRL)
P3.1
(A13
CTRL)
P3.2
(A14
CTRL)
P3.3
(OE
CTRL)
P3.6
(
CE
)
P3.7
(
OE
)
EA
(V
PP
)
P2,P1
(A15..A0)
P0
(D7..D0)
Note
Read
0
0
0
0
0
0
1
Address Data Out
Output Disable
0
0
0
0
0
1
1
X
Hi-Z
Program
0
0
0
0
0
1
V
CP
Address
Data In
Program Verify
0
0
0
0
1
0
V
CP
Address Data Out
@3
Erase
1
0
0
0
0
1
V
EP
A0:0,
others: X
Data In
0FFH
@4
Erase Verify
1
0
0
0
1
0
V
EP
Address Data Out
@5
Program/Erase
Inhibit
X
0
0
0
1
1
V
CP
/
V
EP
X
X
Company ID
1
0
0
0
0
0
1
A0 = 0
Data Out
Device ID
1
0
0
0
0
0
1
A0 = 1
Data Out
Notes:
1. All these operations happen in RST = V
IH
, ALE = V
IL
and PSEN = V
IH
.
2. V
CP
= 12V, V
EP
= 14.5V, V
IH
= V
DD
, V
IL
= V
SS
.
3. The program verify operation follows behind the program operation.
4. This erase operation will erase all the on-chip ROM cells and the Security bits.
5. The erase verify operation follows behind the erase operation.
P1
P3.0
P3.1
P3.2
P3.3
P3.6
P3.7
X'tal1
X'tal2
P0
EA/Vpp
ALE
RST
PSEN
P2
Vss
Vcc
A0-A7
V
CP
V
IL
V
IH
V
IL
V
IL
V
IL
V
IL
V
IL
A8-A15
PGM DATA
V
IH
V
IH
+5V
Programming Configuration
P1
P3.0
P3.1
P3.2
P3.3
P3.6
P3.7
X'tal1
X'tal2
P0
EA/Vpp
ALE
RST
PSEN
P2
Vss
Vcc
A0-A7
V
CP
V
I L
V
IH
V
I L
V
I L
V
I L
V
I L
V
I L
A8-A15
PGM DATA
V
IH
V
IH
+5V
Programming Verification
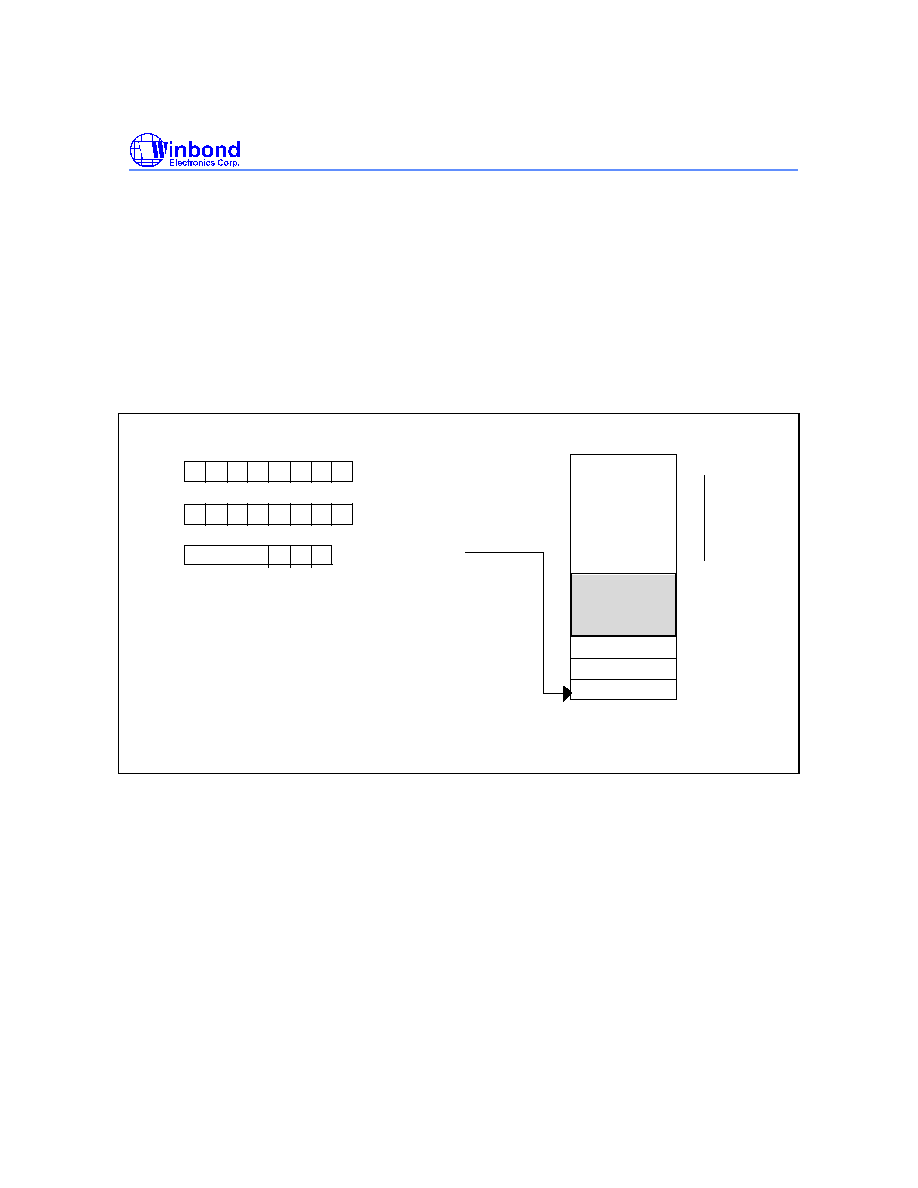
Preliminary W77E468
Publication Release Date: January 1999
- 75 - Revision A1
Security Bits
During the on-chip FLASH ROM operation mode, the FLASH ROM can be programmed and verified
repeatedly. Until the code inside the FLASH ROM is confirmed OK, the code can be protected. The
protection of FLASH ROM and those operations on it are described below.
The W77E468 has several Special Setting Registers, including the Security Register and
Company/Device ID Registers, which can not be accessed in normal mode. These registers can only be
accessed from the FLASH ROM operation mode. Those bits of the Security Registers can not be
changed once they have been programmed from high to low. They can only be reset through erase-all
operation. The contents of the Company ID and Device ID registers have been set in factory. Both
registers are addressed by the A0 address line during the same specific condition.
The Security Register is addressed in the FLASH-ROM operation mode by address #0FFFFh.
B0
B0 : Lock bit, logic 0 : active
B1 : MOVC inhibit,
logic 0 : the MOVC instruction in external memory
cannot access the code in internal memory.
logic 1 : no restriction.
Default 1 for each bit.
Company ID (#DAH)
D7 D6 D5 D4 D3 D2 D1 D0
1 1 0 1 1 0 1 0
Device ID (#62H)
0 1 1
1 0
0 0
Security Bits
0
32KB MTP ROM
Program Memory
Reserved
Security Register
0FFFFh
0000h
7FFFh
Seed 1
Seed 0
0FF7Fh
0FF3Fh
Reserved
On-Chip
B1
B2
B2 : Seed 0 & 1 access inhibit
Special Setting Registers
B0:Lock bit
This bit is used to protect the customer's program code in the W77E468. It may be set after the
programmer finishes the programming and verifies sequence. Once this bit is set to logic 0, both the
FLASH ROM data and Special Setting Registers can not be accessed again.
B1:MOVC Inhibit
This bit is used to restrict the accessible region of the MOVC instruction. It can prevent the MOVC
instruction in external program memory from reading the internal program code. When this bit is set to
logic 0, a MOVC instruction in external program memory space will be able to access code only in the
external memory, not in the internal memory. A MOVC instruction in internal program memory space will
always be able to access the ROM data in both internal and external memory. If this bit is logic 1, there
are no restrictions on the MOVC instruction.
32KB FLASH ROM
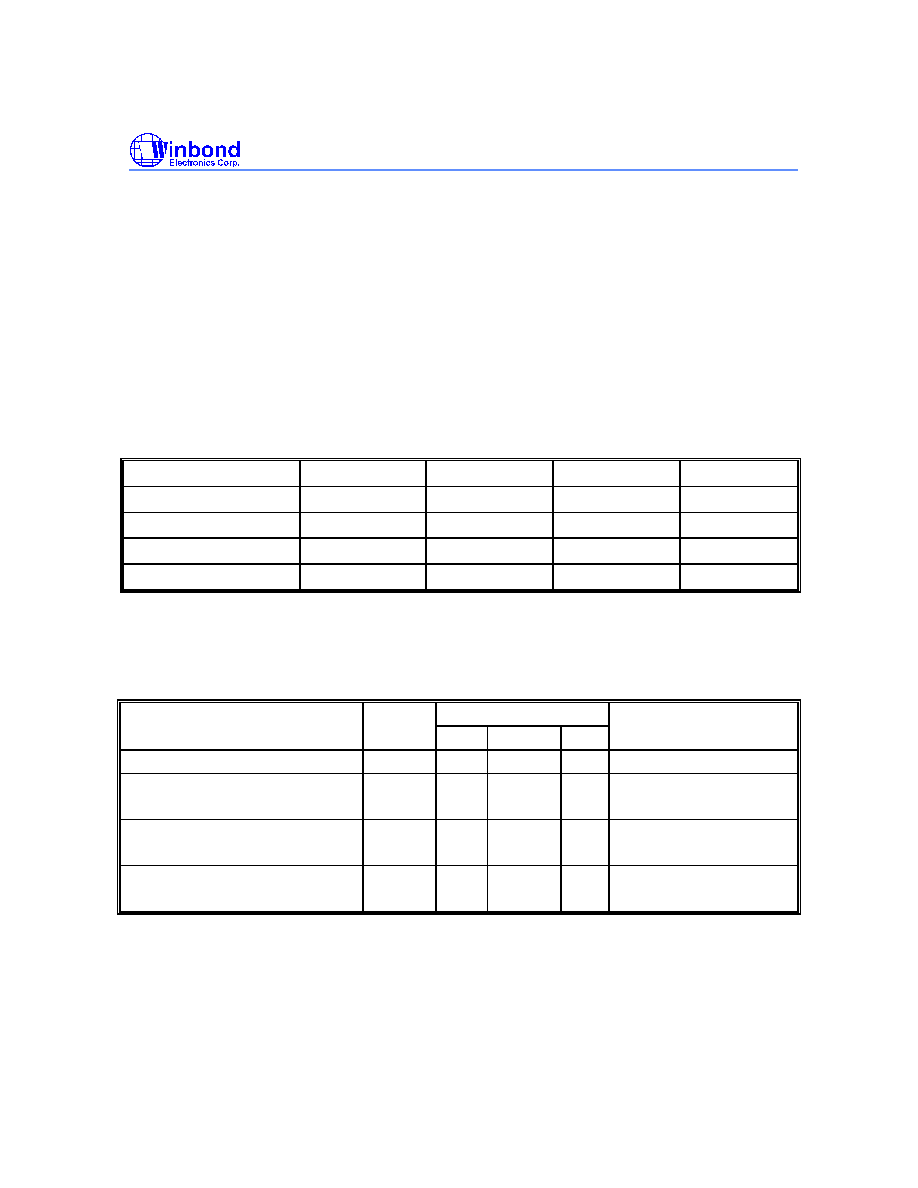
Preliminary W77E468
- 76 -
B2:Encryption Feature
Both the Seed 0 and Seed 1 are a one-byte flash memory cell that provide the user with encryption code
protection. When program code is programmed to the W77E468 internal FLASH ROM and verify it is
correct, then users can program a non-FFh value into either Seed 0 or Seed 1 to start the encryption
logic. When Seed 0 or Seed 1 is presented in non-FFh state, the internal encryption circuit will generate
a sequence of random values, then add to each the program code bytes before they appear in the data
bus. Now the code is scrambled during the read or verify operation. The Seed 0 and Seed 1 have the
initial value FFh after chip erased. When the encryption logic is effective, the user can not disable it
except by erasing the chip to recover the Seed 0 and 1 to initial value FFh. The method for programming
Seed 0 and Seed 1 is the same as that used to program internal FLASH ROM, except that the address
of Seed 0 is 0FF7Fh, and Seed 1 is 0FF3Fh. When B2 bit is cleared, Seed 0 and Seed 1 can not be
accessed.
ABSOLUTE MAXIMUM RATINGS
SYMBOL
PARAMETER
CONDITION
RATING
UNIT
DC Power Supply
V
DD
-
V
SS
-0.3
+7.0
V
Input Voltage
V
IN
V
SS
-0.3
V
DD
+0.3
V
Operating Temperature
T
A
0
+70
∞
C
Storage Temperatute
T
ST
-55
+150
∞
C
Note: Exposure to conditions beyond those listed under Absolute Maximum Ratings may adversely affect the life and reliability
of the device.
DC ELECTRICAL CHARACTERISTICS
(V
DD
-
V
SS
= 5V
±
10%, T
A
= 25
∞
C, Fosc = 20 MHz, unless otherwise specified.)
Parameter
Symbol
Specification
Test Conditions
Min.
Max.
Operating Voltage
V
DD
4.5
5.5
V
Operating Current
I
DD
-
50
mA
No load
V
DD
= 5.5V
Idle Current
I
IDLE
-
20
mA
Idle mode
V
DD
= 5.5V
Power Down Current
I
PWDN
-
50
µ
A
Power-down mode
V
DD
= 5.5V
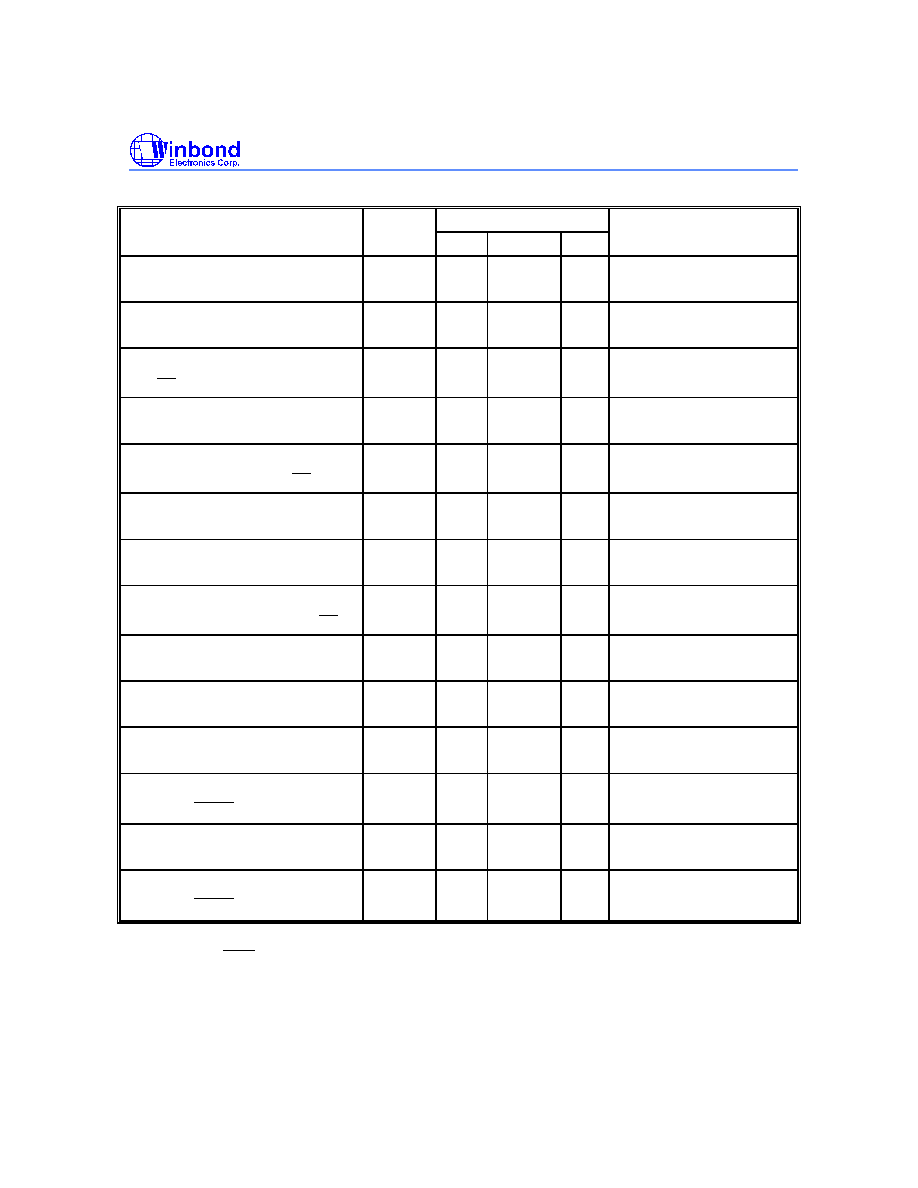
Preliminary W77E468
Publication Release Date: January 1999
- 77 - Revision A1
DC Electrical Characteristics, continued
Parameter
Symbol
Specification
Test Conditions
Min.
Max.
Input Current
P1, P2, P3, P4, P5, P6
I
IN1
-50
+10
µ
A
V
DD
= 5 .5V
V
IN
= 0V or V
DD
Input Current
RST
[*1]
I
IN2
-10
+300
µ
A
V
DD
= 5.5V
0 <V
IN
<V
DD
Input Leakage Current
P0,
EA
I
LK
-10
+10
µ
A
V
DD
= 5.5V
0V<V
IN
<V
DD
Logic 1 to 0 Transition Current
P1, P2, P3, P4, P5, P6
I
TL
[*4]
-500
-
µ
A
V
DD
= 5.5V
V
IN
= 2.0V
Input Low Voltage
P0,P1,P2,P3,P4,P5,P6,
EA
V
IL1
0
0.8
V
V
DD
= 4.5V
Input Low Voltage
RST
[*1]
V
IL2
0
0.8
V
V
DD
= 4.5V
Input Low Voltage
XTAL1
[*3]
V
IL3
0
0.8
V
V
DD
= 4.5V
Input High Voltage
P0, P1, P2, P3, P4, P5, P6,
EA
V
IH1
2.4
V
DD
+0.2
V
V
DD
= 5.5V
Input High Voltage
RST
V
IH2
3.5
V
DD
+0.2
V
V
DD
= 5.5V
Input High Voltage
XTAL1
[*3]
V
IH3
3.5
V
DD
+0.2
V
V
DD
= 5.5V
Output Low Voltage
P1, P2, P3, P4, P5, P6
V
OL1
-
0.45
V
V
DD
= 4.5V
I
OL
= +2 mA
Output Low Voltage
P0, ALE,
PSEN
[*2]
V
OL2
-
0.45
V
V
DD
= 4.5V
I
OL
= +4 mA
Output High Voltage
P1, P2, P3, P4, P5, P6
V
OH1
2.4
-
V
V
DD
= 4.5V
I
OH
= -100
µ
A
Output High Voltage
P0, ALE,
PSEN
[*2]
V
OH2
2.4
-
V
V
DD
= 4.5V
I
OH
= -400
µ
A
Notes:*1. RST pin is a Schmitt trigger input.
*2. ALE and PSEN are tested in the external access mode.
*3. XTAL1 is a CMOS input.
*4. Pins of P1, P2, P3, P4, P5, P6 can source a transition current when they are being externally driven from 1 to 0. The
transition current reaches its maximum value when V
IN
approximates to 2V.
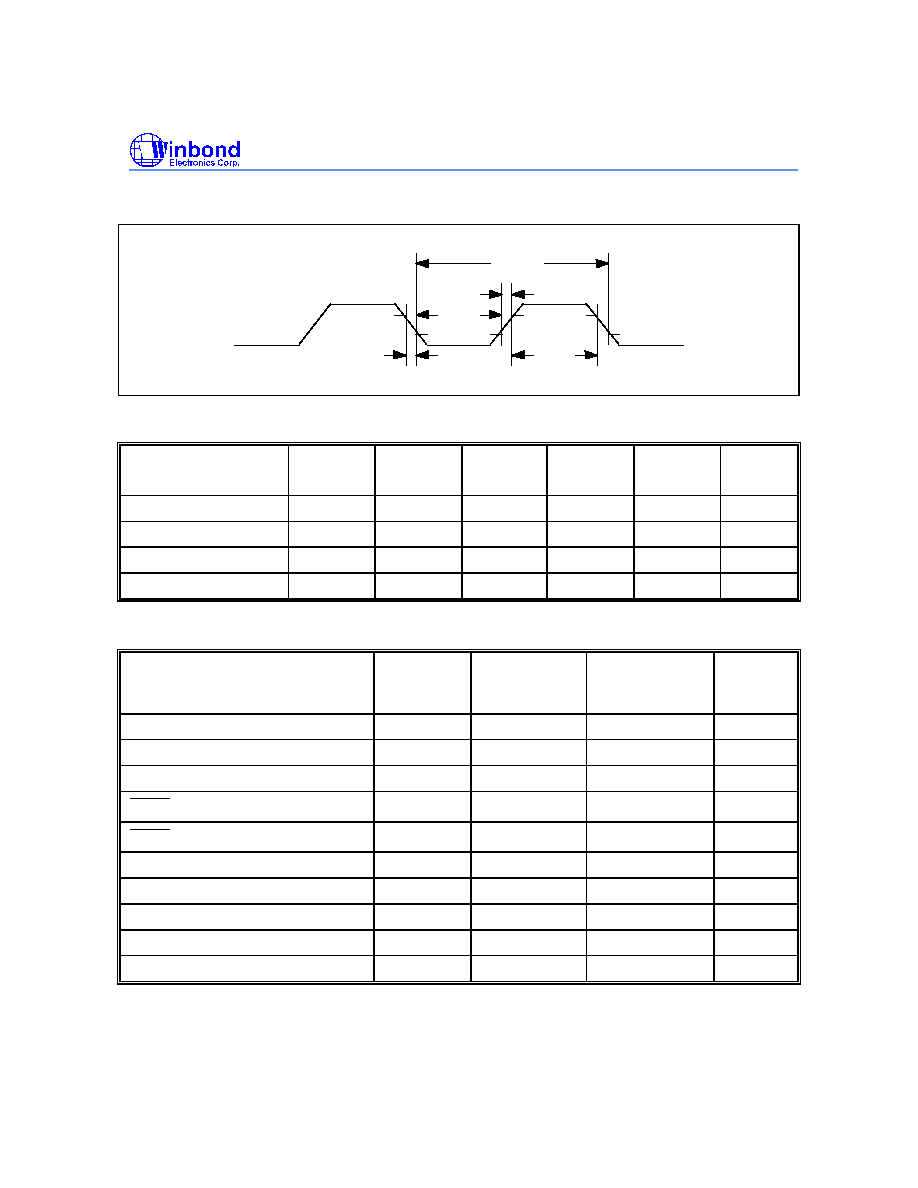
Preliminary W77E468
- 78 -
AC ELECTRICAL CHARACTERISTICS
t
CLCL
t
CLCX
t
CHCX
t
CLCH
t
CHCL
EXTERNAL CLOCK CHARACTERISTICS
PARAMETER
SYMBOL
MIN
TYP
MAX
UNITS
NOTES
Clock High Time
t
CHCX
12.5
-
-
nS
Clock Low Time
t
CLCX
12.5
-
-
nS
Clock Rise Time
t
CLCH
-
-
10
nS
Clock Fall Time
t
CHCL
-
-
10
nS
AC SPECIFICATION
PARAMETER
SYMBOL
VARIABLE
CLOCK
MIN
VARIABLE
CLOCK
MAX
UNITS
Oscillator Frequency
1/t
CLCL
0
40
MHz
ALE Pulse Width
t
LHLL
1.5t
CLCL
- 5
nS
ALE Low to Valid Instruction In
t
LLIV
2.5t
CLCL
- 20
nS
PSEN
Pulse Width
t
PLPH
2.0t
CLCL
- 5
nS
PSEN
Low to Valid Instruction In
t
PLIV
2.0t
CLCL
- 20
nS
Input Instruction Hold After PSEN
t
PXIX
0
nS
Input Instruction Float After PSEN
t
PXIZ
t
CLCL
- 5
nS
Address to Valid Instr. In
t
AVIV2
3.5t
CLCL
- 20
nS
Data Hold After Read
t
RHDX
0
nS
Data Float After Read
t
RHDZ
t
CLCL
- 5
nS
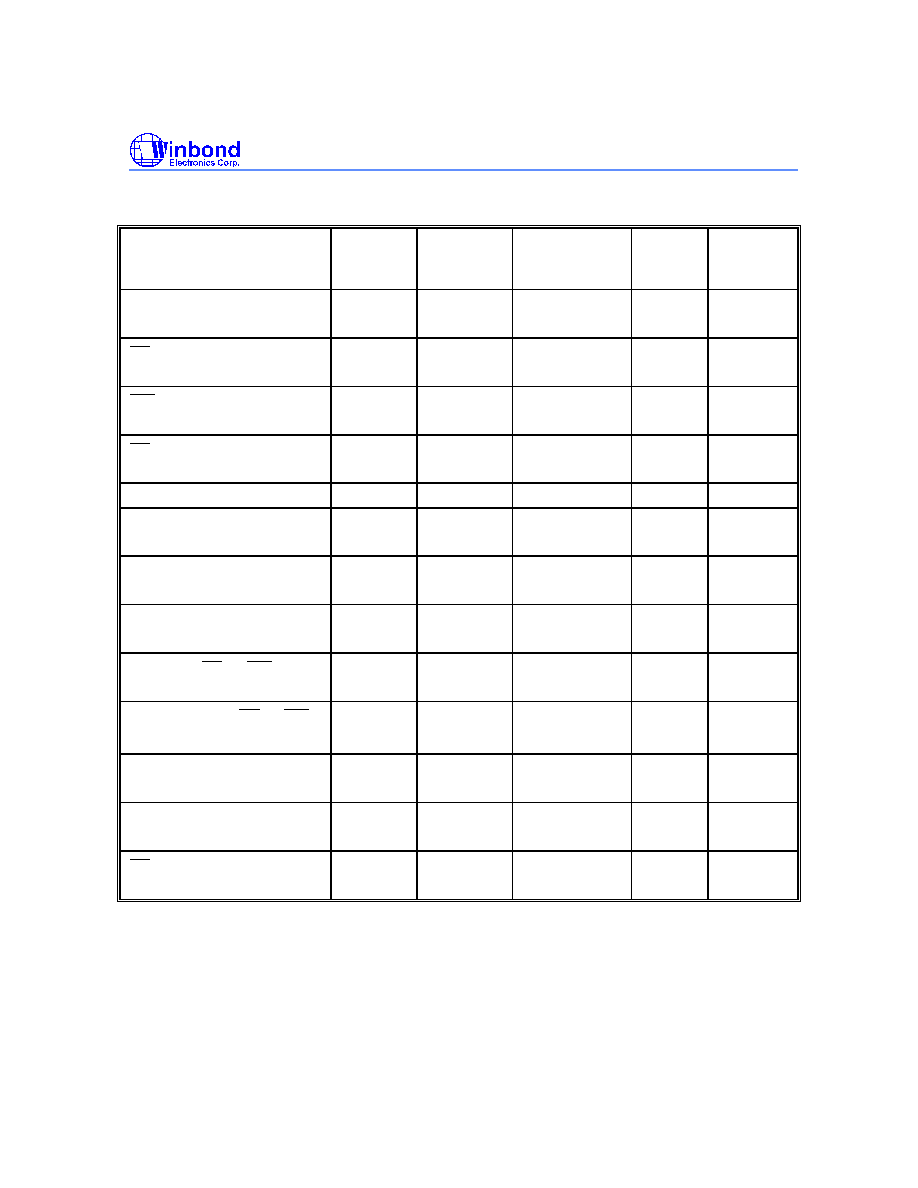
Preliminary W77E468
Publication Release Date: January 1999
- 79 - Revision A1
MOVX CHARACTERISTICS USING STRECH MEMORY CYCLES
PARAMETER
SYMBOL
VARIABLE
CLOCK
MIN
VARIABLE
CLOCK
MAX
UNITS
STRECH
Data Access ALE Pulse Width
t
LLHL2
1.5t
CLCL
- 5
2.0t
CLCL
- 5
nS
t
MCS
= 0
t
MCS
> 0
RD
Pulse Width
t
RLRH
2.0t
CLCL
- 5
t
MCS
- 10
nS
t
MCS
= 0
t
MCS
> 0
WR
Pulse Width
t
WLWH
2.0t
CLCL
- 5
t
MCS
- 10
nS
t
MCS
= 0
t
MCS
> 0
RD
Low to Valid Data In
t
RLDV
2.0t
CLCL
- 20
t
MCS
- 20
nS
t
MCS
= 0
t
MCS
> 0
Data Hold after Read
t
RHDX
0
nS
Data Float after Read
t
RHDZ
t
CLCL
- 5
2.0t
CLCL
- 5
nS
t
MCS
= 0
t
MCS
> 0
ALE Low to Valid Data In
t
LLDV
2.5t
CLCL
- 5
t
MCS
+ 2t
CLCL
- 40
nS
t
MCS
= 0
t
MCS
> 0
Address to Valid Data In
t
AVDV2
3.5t
CLCL
- 20
2.5t
CLCL
- 5
nS
t
MCS
= 0
t
MCS
> 0
ALE Low to
RD
or
WR
Low
t
LLWL
0.5t
CLCL
- 5
1.5t
CLCL
- 5
0.5t
CLCL
+ 5
1.5t
CLCL
+ 5
nS
t
MCS
= 0
t
MCS
> 0
Port 2 Address to
RD
or
WR
Low
t
AVWL2
1.5t
CLCL
- 5
2.5t
CLCL
- 5
nS
t
MCS
= 0
t
MCS
> 0
Data Valid to WR Transition
t
QVWX
-5
1.0t
CLCL
- 5
nS
t
MCS
= 0
t
MCS
> 0
Data Hold after Write
t
WHQX
t
CLCL
- 5
2.0t
CLCL
- 5
nS
t
MCS
= 0
t
MCS
> 0
RD
or WR high to ALE high
t
WHLH
0
1.0t
CLCL
+ 5
10
1.0t
CLCL
+ 5
nS
t
MCS
= 0
t
MCS
> 0
Note: t
MCS
is a time period related to the Stretch memory cycle selection. The following table shows the time period of t
MCS
for
each selection of the Stretch value.
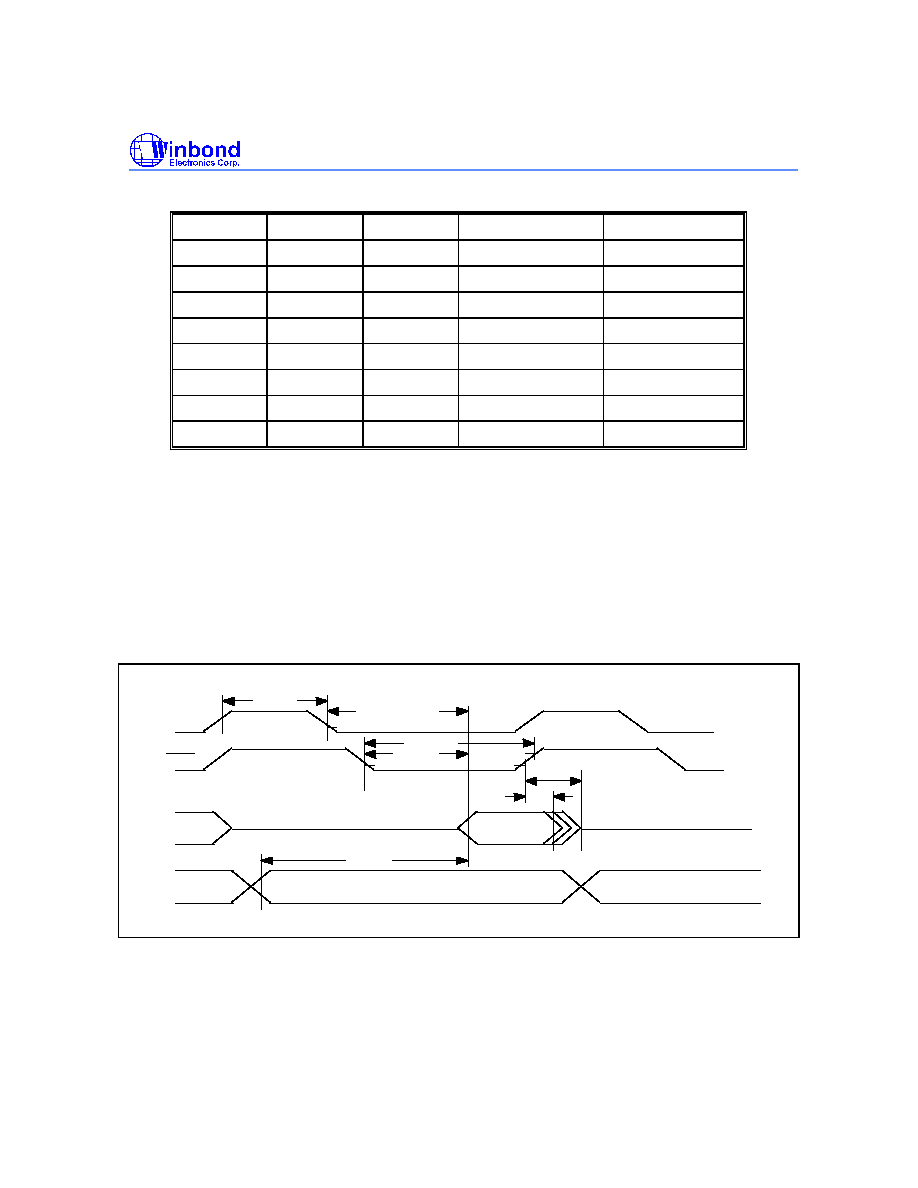
Preliminary W77E468
- 80 -
M2
M1
M0
MOVX Cycles
t
MCS
0
0
0
2 machine cycles
0
0
0
1
3 machine cycles
4 t
CLCL
0
1
0
4 machine cycles
8 t
CLCL
0
1
1
5 machine cycles
12 t
CLCL
1
0
0
6 machine cycles
16 t
CLCL
1
0
1
7 machine cycles
20 t
CLCL
1
1
0
8 machine cycles
24 t
CLCL
1
1
1
9 machine cycles
28 t
CLCL
EXPLANATION OF LOGIC SYMBOLS
In order to maintain compatibility with the original 8051 family, this device specifies the same parameter
for each device, using the same symbols. The explanation of the symbols is as follows.
t: Time
A: Address
C: Clock
D: Input Data
H: Logic level high
L: Logic level low
I: Instruction
P: PSEN
Q: Output Data
R: RD signal
V: Valid
W: WR signal
X: No longer valid state Z: Tri-state
PROGRAM MEMORY READ CYCLE
t
PXIZ
t
PXIX
t
PLIV
t
AVIV2
t
PLPH
ADDRESS A0-A15
ADDRESS A0-A15
INSTRUCTION
IN
A0-A15
D0-D7
PSEN
ALE
t
LLIV
t
LHLL
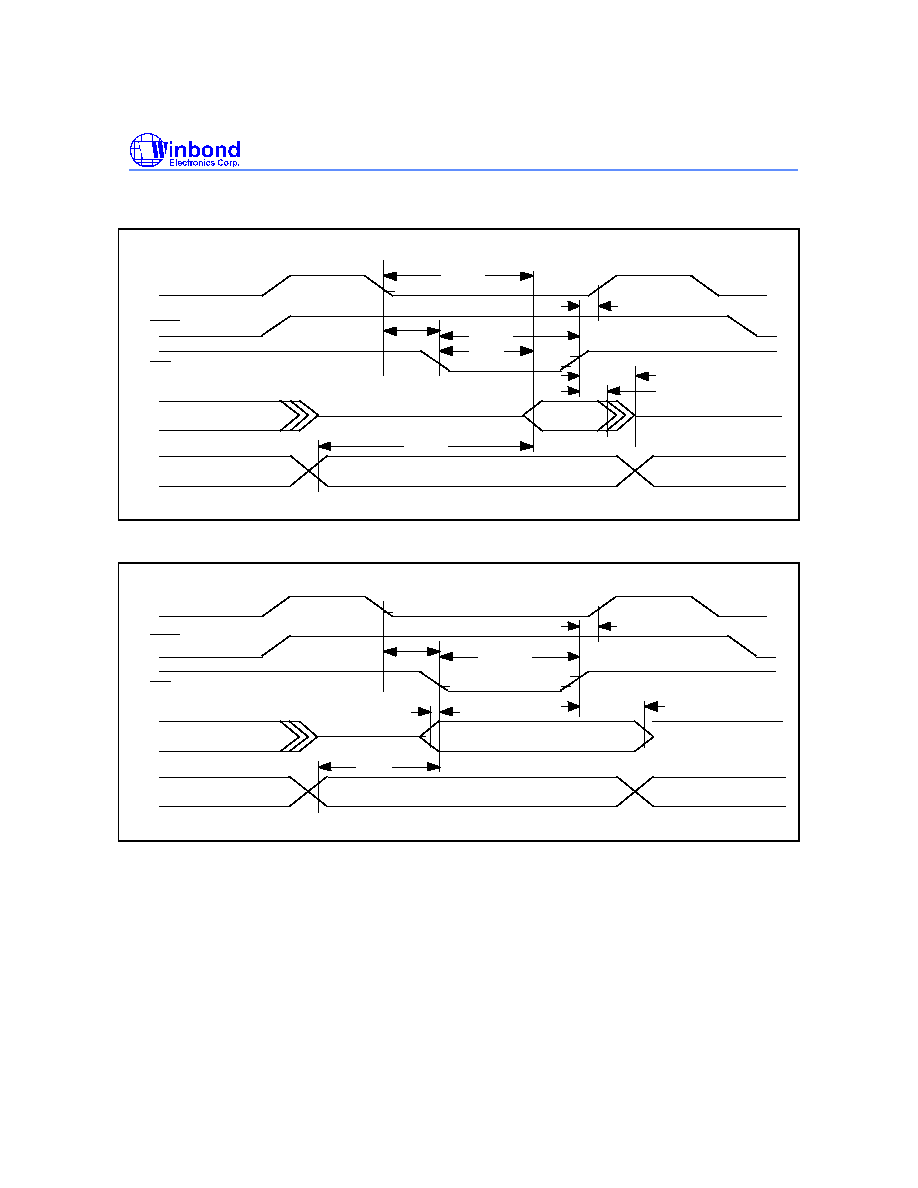
Preliminary W77E468
Publication Release Date: January 1999
- 81 - Revision A1
DATA MEMORY READ CYCLE
t
WHLH
t
RLDV
t
RLRH
t
RHDZ
t
RHDX
t
AVDV2
t
LLWL
ADDRESS A0-A15
INSTRUCTION
IN
DATA
A0-A15
D0-D7
PSEN
RD
ALE
t
LLDV
DATA MEMORY WRITE CYCLE
t
WHLH
t
WLWH
t
QVWX
t
WHQX
t
AVDV2
t
LLWL
ADDRESS A0-A15
INSTRUCTION
IN
DATA OUT
A0-A15
D0-D7
PSEN
WR
ALE
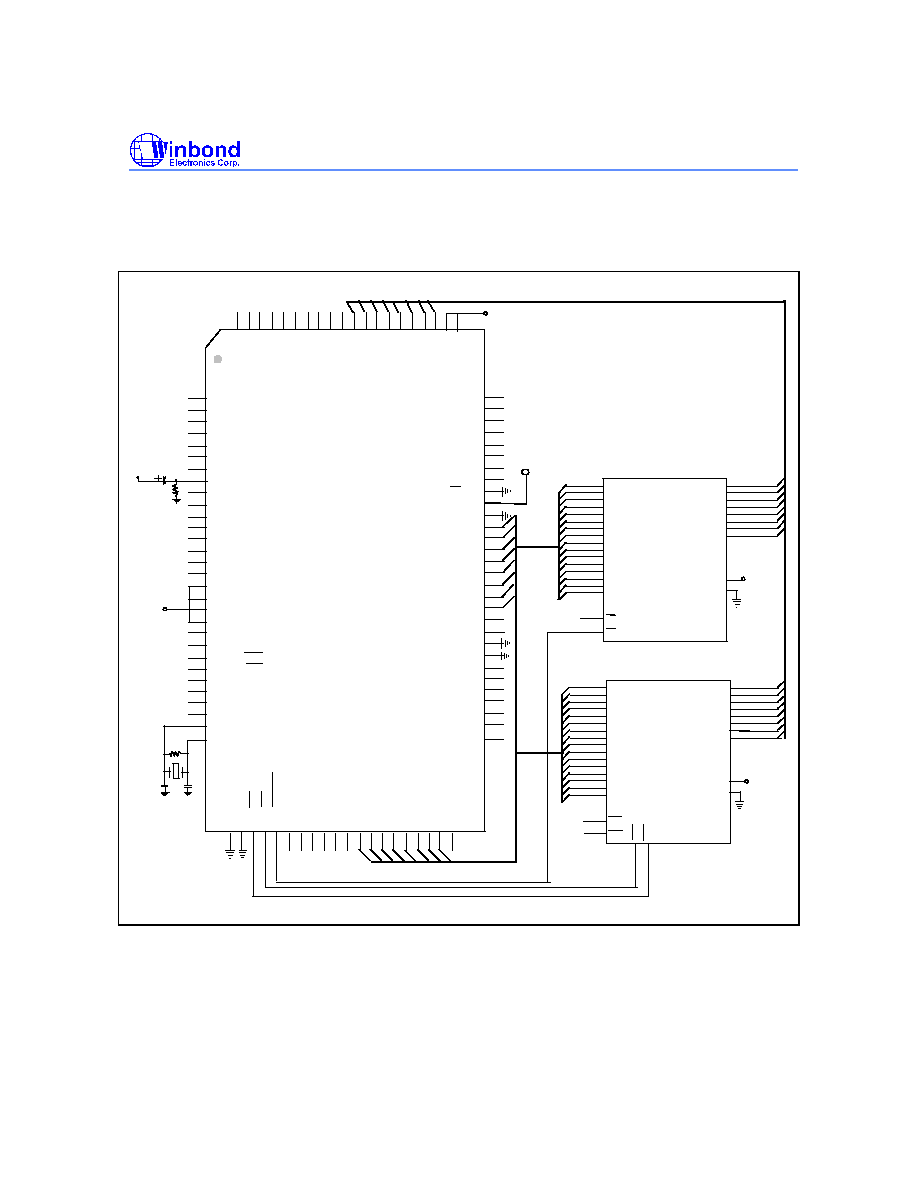
Preliminary W77E468
- 82 -
TYPICAL APPLICATION CIRCUITS
Using External ROM and RAM
4
5
6
7
8
9
10
11
12
13
14
15
16
17
1
2
3
18
19
20
21
22
23
24
25
26
27
28
29
30
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
1
2
3
4
8
9
7
8
9
0
1
2
3
4
5
6
7
8
9
0
6 5
8
8
8
8
8
8
8
8
9
9
9
9
9
9
9
9
9
1
0
P1.1
P
2
.
0
P2.1
P2.2
A7
A6
A5
A4
A3
A2
A1
A0
P2.3
P2.4
P2.5
NC
ALE
EA
0
1 2
3 3 3
3 4 5
3 3 3
6
3
7 8
3 3
9 0
4 4
1 2 3 4 5 6 7 8 9
4 4 4 4 4 4 4 4 5
VDD
8.2 K
10 U
P1.2
P1.3
RESET
P4.1
P4.2
P4.3
P4.4
P4.5
VDD
P4.0
P4.6
P4.7
N
C
N
C
P
6
.
3
P
6
.
2
P
6
.
0
P
6
.
1
P0.5
P0.7
P0.6
P0.4
D
7
D
6
D
5
D
4
D
3
D
2
D
1
D
0
VDD
VDD
VSS
W77E468
P3.1, TXD
P3.3, INT1
P3.4, T0
P3.2, INT0
P3.5, T1
P3.6
V
D
D
V
D
N
C
V
S
S
R
D
D
VDD
P
5
.
4
P
5
.
3
P
5
.
2
P
5
.
1
P
5
.
0
P
5
.
7
P
5
.
6
P
5
.
5
P
1
.
0
P1.4
P1.5
P1.6
P1.7
VDD
P3.0, RXD
P3.7
XTAL2
XTAL1
C1
C2
R
V
S
S
W
R
P
S
N
E
5
1
A
4
1
A
3
1
A
2
1
A
1
1
A
0
1
A
9
A
8
A
P0.1
P0.3
P0.2
P0.0
P2.6
P2.7
VSS
VSS
A0
10
A1
9
A2
8
A3
7
A4
6
A5
5
A6
4
A7
3
A8
25
A9
24
A10
21
A11
23
A12
2
A13
26
A14
27
A15
1
CE
OE
Q0
11
Q1
12
Q2
13
Q3
15
Q4
16
Q5
17
Q6
18
Q7
19
GND
VDD
GND
20
22
28
14
W27E512
+5V
A0
12
A1
11
A2
10
A3
9
A4
8
A5
7
A6
6
A7
5
A8
27
A9
26
A10
23
A11
25
A12
4
A13
28
A14
3
A15
31
CS1
CS2
I/O1 13
I/O2 14
I/O3 15
I/O4 17
I/O5 18
I/O6 19
I/O7 20
I/O8 21
GND
VDD
VSS
22
30
32
16
W24512
+5V
GND
W
E E
O
2
4
2
9
+5V
VDD
VDD
Figure A
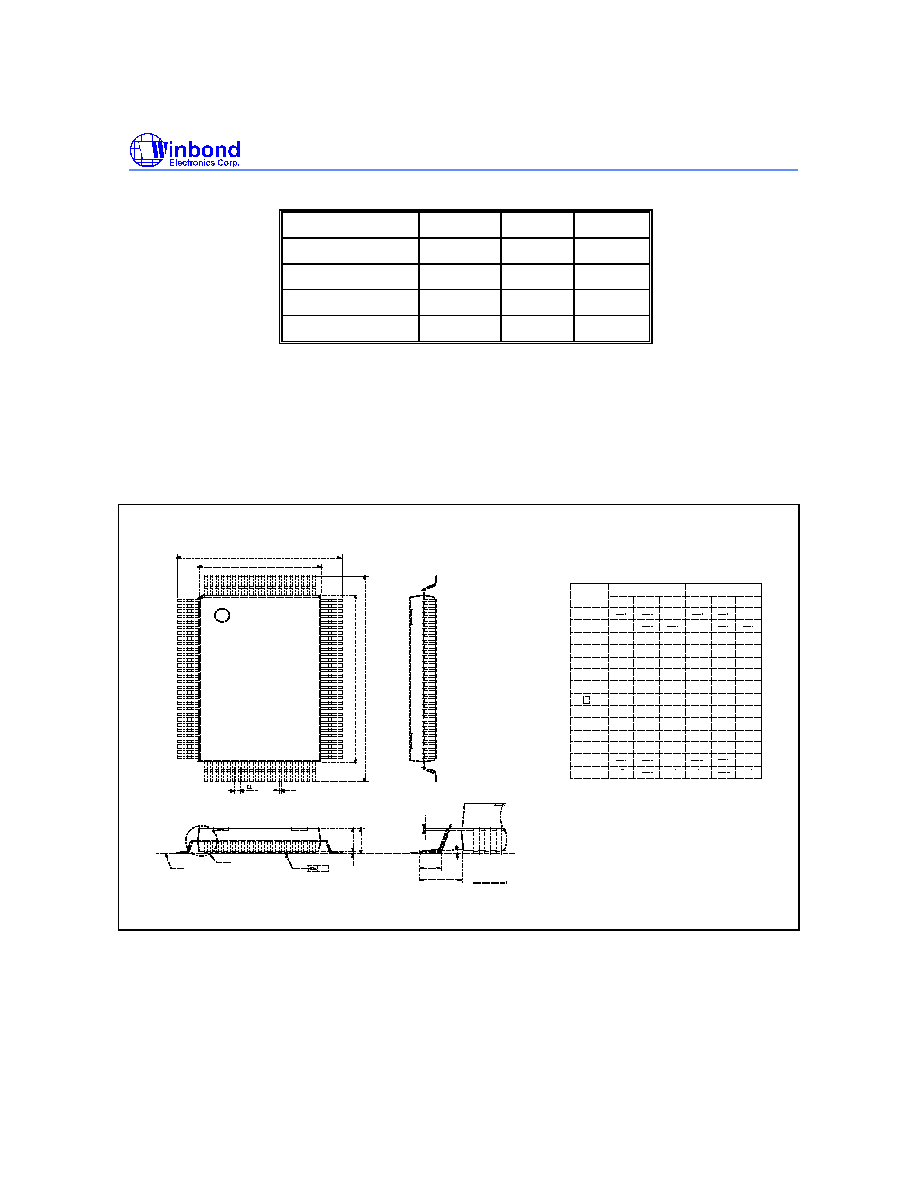
Preliminary W77E468
Publication Release Date: January 1999
- 83 - Revision A1
CRYSTAL
C1
C2
R
16 MHz
-
-
-
24 MHz
-
-
-
33 MHz
-
-
2.7K
40 MHz
-
-
2.7K
The above table shows the reference values for crystal applications.
Note: C1, C2, R components refer to Figure A.
PACKAGE DIMENSIONS
100-pin QFP
51
50
31
30
1
80
81
100
1
A
H
D
D
e
b
E H
E
y
A
A
Seating Plane
L
L
1
See Detail F
Detail F
c
1. Dimension D & E do not include interlead
flash.
2. Dimension b does not include dambar
protrusion/intrusion.
3. Controlling dimension: Millimeters
4. General appearance spec. should be based
on final visual inspection spec.
0.102
0
12
0
0.004
2.413
1.397
19.10
1.194
18.80
0.991
18.49
0.095
0.055
0.988
0.752
0.047
0.976
0.740
0.039
0.964
0.728
0.65
20.13
14.13
0.254
0.407
2.972
3.30
20.00
14.00
2.845
19.87
13.87
0.101
0.254
2.718
0.10
0.792
0.556
0.010
0.016
0.117
0.130
0.787
0.551
0.112
0.026
0.782
0.546
0.004
0.010
0.107
0.004
Notes:
Symbol
Min. Nom. Max.
Max.
Nom.
Min.
Dimension in inches
Dimension in mm
A
b
c
D
e
H
D
H
E
L
y
A
A
L
1
1
2
E
0.012
0.006
0.152
0.305
24.49
24.80
25.10
12
0.020
0.087
0.032
0.103
0.498
0.802
2.21
2.616
2
Preliminary W77E468
- 84 -
Headquarters
No. 4, Creation Rd. III,
Science-Based Industrial Park,
Hsinchu, Taiwan
TEL: 886-3-5770066
FAX: 886-3-5792766
http://www.winbond.com.tw/
Voice & Fax-on-demand: 886-2-27197006
Taipei Office
11F, No. 115, Sec. 3, Min-Sheng East Rd.,
Taipei, Taiwan
TEL: 886-2-27190505
FAX: 886-2-27197502
Winbond Electronics (H.K.) Ltd.
Rm. 803, World Trade Square, Tower II,
123 Hoi Bun Rd., Kwun Tong,
Kowloon, Hong Kong
TEL: 852-27513100
FAX: 852-27552064
Winbond Electronics North America Corp.
Winbond Memory Lab.
Winbond Microelectronics Corp.
Winbond Systems Lab.
2727 N. First Street, San Jose,
CA 95134, U.S.A.
TEL: 408-9436666
FAX: 408-5441798
Note: All data and specifications are subject to change without notice.